
The State transition matrix is that matrix whose product with the state vector at initial time gives the value of variable x for time t. The state transition matrix is helpful for finding controllability, general solution, observability and stability of the LTI system.
State Transition Matrix and its Properties:
As we know the output equation is given as
y(t)=Cx(t)+Du(t)
x(t)=Ax(t)+Bu(t)
d(x)/dt -Ax(t)=Bu(t)
Taking Laplace transform of above equation we have
SX(s)-X(0)-AX(s)=BU(s)
SX(s)-AX(s)=BU(s)+X(0)
[SI-A]X(s)=X(0)+BU(s)
X(s)=[SI-A]-1[X(0)+BU(s)]
X(s)=[SI-A]-1X(0)+[SI-A]-1BU(s) (a)
This is solution of state differential equation
L-1X(s)= L-1{[SI-A]-1X(0)+[SI-A]-1BU(s)}
x(t)= [SI-A]-1x(0)+ [SI-A]-1Bu(t) (b)
From above x(t) we can find output equation by replacing x(t) in output equation by its value from above equation(b)
For the given system below
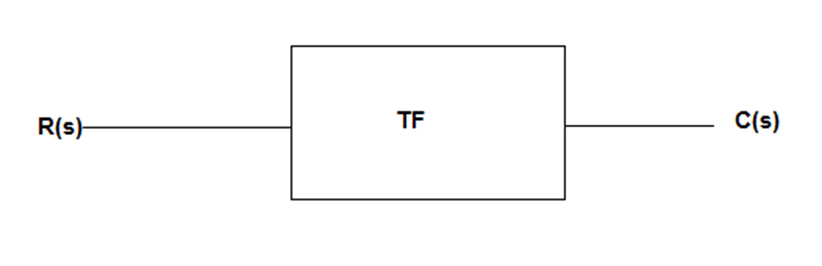
The transfer function of above system is given as
TF=c(t)/r(t)
This c(t) is the output of the present system, which is not equal to above y(t), as their initial conditions are not considered.
If initial conditions are zero than both y(t) and c(t) will be equal to
L-1[SI-A]-1=φ(t)…….. state transition matrix
Φ(s)=[SI-A]-1
x(t)=φ(t)x(0)+L-1[φ(s)* BU(s)]
When the input is zero i.e. u(t) =0 the State transition matrix satisfies the solution of the state equation
As u(t)=0
Solution to above equation is
y(t)=Ke-Pt+e-Pt∫ ePt Q d(t)
But [dx(t)/dt] -Ax(t)=0
Hence above equation becomes
X(t)=AeAt
Substitute t=0
x(0)=ke0
x(0)=k
x(t)=x(0) e At (zero input response)
The above equation is the Zero Input Response of the system.
Properties
From above equation when u(t)=0
x(t)=φ(t) x(0)
and from zero input response we have
φ(t)=eAt
Property 1:
φ(0)= [I]
Property 2:
Φ-1(t)= [φ(t)]-1=e-At=eA(-t)
Φ-1(t)= Φ(-t)
Property 3:
ΦK(t)= [Φ(t)]K
ΦK(t)=[eAt]K=eA(tK)
Then ΦK(t)= Φ(Kt)
Property 4:
Φ(t1+t2)=eA(t1+t2)
=e(At1+At2)=eAt1 * eAt2
Φ(t1+t2)= Φ(t1)Φ(t2)
Property 5:
Φ(t2-t1) * φ(t1-t0)=e A(t2-t1) * e A(t1-t0)
Φ(t2-t1) * φ(t1-t0)= Φ(t2-t0)
Example
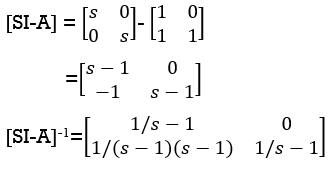
- If matrix
Find the state transition matrix?
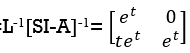
Solution: The state transition matrix is given by L-1[SI-A]-1=φ(t)
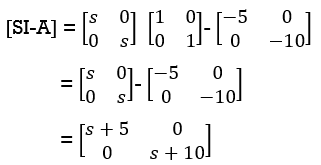
Taking inverse Laplace of above, we get
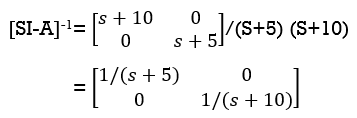
Hence φ(t)=L-1[SI-A]-1
2) Find φ(t) if
Solution: As we already know that L-1[SI-A]-1=φ(t)
Hence φ(t)=L-1[SI-A]-1
Interested in learning about similar topics? Here are a few hand-picked blogs for you!
- What is ZigBee?
- Encoders and Decoders
- Working of UART
- Classification of FFT
- Fourier Transform and its properties