
Before understanding sampling theorem we first need to understand sampling. Sampling usually refers to conversion of continuous signal into short duration of pulses each pulse followed by a skip period when no signal is available. The uniformly sampled signal is below.
Following are two popular sampling operations:
1. Single rate or periodic sampling
2. Multi-rate sampling
Figure below shows the structure and operation of a finite pulse width sampler, where (a) represents the basic block diagram and (b) illustrates the function of the same. T is the sampling period and p is the sample duration.


Figure (a): Basic block diagram

Figure (b): Sampler output
Finite pulse width sampler converts a continuous time signal into a pulse modulated or discrete signal. The most common type of modulation in the sampling and hold operation is the pulse amplitude modulation.
The block diagram of sampler is below, having a pulse train of p seconds and sampling period of T seconds.
p(t)= unit pulse train with period T
Us(t)=unit step function
In frequency domain we write p(t) as

p(t)=1 for 0≤ t ≤p
The output of the ideal sampler is written as

The approximation of the output sampler will now be

Shannon’s Sampling theorem
In sampling the signal m(t) is multiplied with periodic pulse trains. Let M(ω) the spectrum of the input signal be band limited with the maximum frequency of fm as shown in figure.
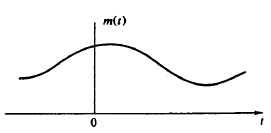
Input Signal m(t)

Figure 2((fs>2 fm)

{kind=link}
Figure: 3 (fs<2 fm)
The frequency spectrum of this signal when we sample the impulse is in figure 2 (for fs>2 fm). In figure 3 for (fs<2 fm). From figure 2 and figure 3 we can see that as long as fs≥2fm the original signal is present in the sampled signal and can be extracted from it by the low pass filter. This is known as Shannon’s Sampling theorem. This theorem states that the information present in a signal is fully preserved in the sampled form as long as the sampling frequency is at least twice the maximum frequency contained in the signal.
Practical aspects of choice of sampling rate
1) When fs>2 fm due to aliasing there is loss of information as seen from the above figure. The signal components do not possess fm. Some components are outside the bandwidth.
2) To avoid aliasing we use anti aliasing filters. The cut off frequency fs/2 of the filter needs to be higher than the bandwidth of the system.
3) There is dead time in the system due to conversion of signals. Hence, the sampling interval in such a manner that the stability limit of the closed loop control system as the sampling interval is increased.
4) The error occurs due to conversion of signal to digital form. As the sampling interval increases the error also increase.
5) The Empirical rule for the selection of the sampling rate states that a sampling period should be much shorter than any of the time constants in the continuous time plant to be controlled digitally. The sampling rate needs to be equal to one tenth of the smallest time constant.
Interested in learning about similar topics? Here are a few hand-picked blogs for you!