Unit – 5
Electrical Machines
Construction details of D.C. Machine
Whether machine is D.C. generator or motor the construction basically remains the same.
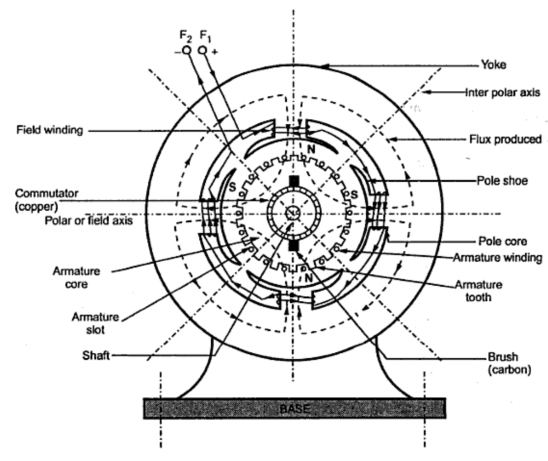
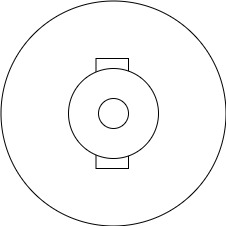
A cross section of typical D.C. machine
1)Yoke
a)Functions
1. It serve the purpose of outermost cover of the D.C. machine. So that the insulating materials get protected from harmful atmospheric elements like moisture. dust and various gases like  , acidic fumes etc.
, acidic fumes etc.
2. It provides mechanical support to the poles.
3. It forms a part of the magnetic circuit.
It provides a path of low reluctance for magnetic flux. The low reluctance path is important to avoid wastage of power to provide same flux large current and hence the power is necessary if the path has high reluctance to produce the same flux.
4.Choice of material:- It is prepared by using cast iron, silicon steel is used which provides high permeability i.e. low reluctance and gives good mechanical strength.
2) Poles
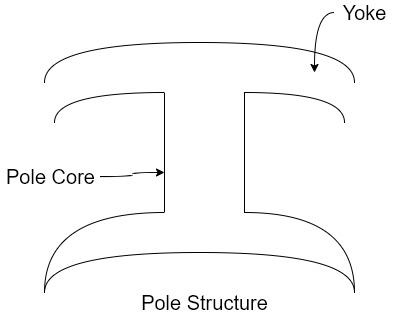
Pole structure
Each Pole is divided into two parts namely
Functions of pole core and pole shoe:-
Choice of material:-
It is made up of magnetic material like cast iron or cast steel.
As it requires a definite shape and size, laminated construction is used. The laminations of required size and shape are stamped together to get a pole which is then bolted to the yoke.
3) Field Winding (
The field winding is wound on the pole core with a definite direction.
a)Functions:-
To carry current due to which pole core on which the field winding is placed behaves as an electromagnet, producing necessary flux.
As it helps in producing the magnetic field i.e. exciting the poles as an electromagnet it is called Field winding or Exciting winding.
b) Choice of material:-
It has to carry current hence obviously made up of some conducting material.
So aluminium or copper is the choice. But field coils are required to take four types of shape and bent about pole core and copper has good pliability i.e. it can be bend easily. So copper is the proper choice .field winding is divided into various coils called field coils. These are connected in series with each other and wound in such direction around pole cores, such that alternate 'N' and 'S' poles are formed.
The total number of poles is denoted as P.
4) Armature
The armature is further divided into two parts namely
1.Armature core:- Armature core is cylindrical in in shape mounted on the shaft. It consists of slots on its periphery and air ducts to permit the air flow through armature which serves cooling purpose.
a) Functions-
1) Armature core provides house for armature winding i.e. armature conductors.
2)To provide the path of low reluctance to the magnetic flux produced by the field winding.
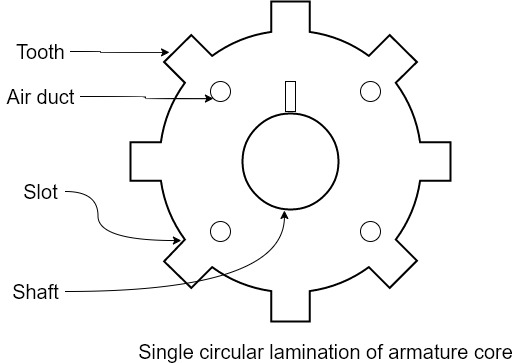
b) Choice of material:-
As it has to provide a low reluctance path to the flux, it is made up of magnetic material like cast iron or cast steel.
It is made up of laminated construction to keep Eddy current loss as low as possible. A single circular lamination used for the construction of armature core is shown in figure.
3. Armature winding
Armature winding is nothing but the interconnection of the armature conductors
placed in the slots provided on the armature core periphery.
When the armature is rotated in case of generator magnetic flux gets cut by
armature conductors and e.m.f gets induced in them.
a)Functions
1) curvatures of e.m.f takes place in the armature winding in case of generators.
2) To carry the current supplied in case of D.C. motors.
3) To do the useful work in the external circuit.
b) Choice of Material:-
As armature winding carries entire current which depends on external load, it has to be made up of conducting material which is copper.
5.Commutator
The basic nature of e.m.f in the armature conductors is alternating. This needs verification in case of D.C. generator, which is possible by a device called commutator.
a)Functions:
1)To facilitate the collection of current from the armature conductors.
2) To convert internally developed alternating e.m.f to unidirectional (D.C.) e.m.f.
3) To produce unidirectional torque in case of motors
b) Choice of Material:-
As it collects current from armature, it is also made up of copper segments.
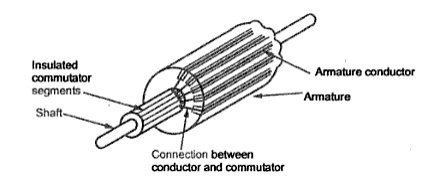
It is cylindrical in shape and is made up of wedge-shaped segments of hand drawn high conductivity copper .the segments are insulated from each other by thin layer of Mica.
Each commutator segment is connected to the armature conductor by means of copper lug or strip. This construction is shown in figure above.
6. Brushes and Brush Gear
Brushes are stationary and resting on the surface of the commutator.
a)Function-
to collect current from computer and make it available to stationary external circuit.
b) Choice of Material:-
Brushes are normally made up of soft material like carbon.
To avoid wear and tear of commutator the brushes are made up of soft material like carbon
7) Bearings
Ball bearings are usually used as they are more reliable. For heavy duty machines roller bearing are preferred.
Back EMF in DC motor
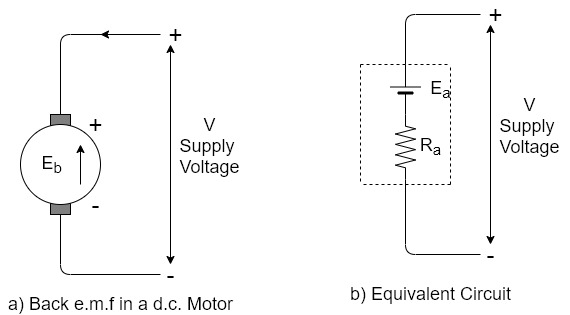
As this EMF always opposes the supply voltage it is called back EMF and denoted as  .Though it is denoted as
.Though it is denoted as  basically it gets generated by the generating action which we have seen earlier in case of generators. So its magnitude can be determined by the EMF equation which is derived earlier.
basically it gets generated by the generating action which we have seen earlier in case of generators. So its magnitude can be determined by the EMF equation which is derived earlier.

Where all symbols carry the same meaning as seen earlier in case of generators
This EMF issued systematically in figure a so if v is supply voltage in volts &  is the value of the armature resistance the equivalent electric circuit can be shown in figure b
is the value of the armature resistance the equivalent electric circuit can be shown in figure b
Voltage equation of DC motor
From the equivalent circuit the voltage equation for a DC motor can be obtained as

The brush drop is practically neglected.
Hence the armature current  is expressed as
is expressed as

Significance of back EMF
Due to the presence of back EMF the DC motor becomes a regulating machine that is motor adjust itself to draw the armature current just enough to satisfy the load demand.
he basic principle of this fact is that the back EMF is proportional to speed 
When load is suddenly put on the motor. Motor tries to slow down. So speed of the motor reduces due to which back EMF also decreases. So the net voltage across the armature Increases and motor draws more armature current.
Increases and motor draws more armature current.
Due to the increased armature current force experienced by the conductors and hence the torque on the armature increases. The increase in the torque is just sufficient to satisfy increase load demand.
When load on the motor is decreased the speed of the motor tries to increase. Hence back EMF increases. This  to reduce which eventually reduces the current drawn by the armature. The motor speed stops increasing when the armature current is just enough to produce the less torque required by the new load.
to reduce which eventually reduces the current drawn by the armature. The motor speed stops increasing when the armature current is just enough to produce the less torque required by the new load.
So back EMF regulate the flow of armature current and it automatically alters the armature current to meet the load requirement. This is the practical significance of the back EMF.
Head start the speed N of the motor is zero hence the back EMF is also zero.
1) A 220 volt DC motor has an armature resistance of 0.75 ohm. It is drawing and armature current of 30 A, driving a certain load. Calculate the induced EMF in the motor under this condition.
V=200V 

Are the given values
For a motor ,
V=
220= +30*0.75
+30*0.75
 =197.5 V
=197.5 V
This is the induced EMF called a back EMF in a motor
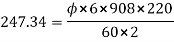
2) Find the useful flux per pole on no load of a 250V 6 pole shunt motor having two circuit connected armature winding with 225 conductors.at normal working temperature the overall armature resistance including brushes is 0.2 ohm. The armature current is 13.3A at the no load speed of 908 RPM.
Solution
V=250 P=6 Z=220 A=2
As two circuit armature


N=908 r.p.m
For a DC shunt motor

250= +13.3*0.2 i.e.
+13.3*0.2 i.e. 
Back emf  is given by
is given by


Power equation of a DC motor
The voltage equation of a DC motor is given by
V= 
Multiplying both sides of the above equation by 
V =
= 
This equation is called as power equation of a DC motor
V =net electric power input to the armature measured in watts
=net electric power input to the armature measured in watts
 power loss due to the resistance of the armature called armature copper loss.
power loss due to the resistance of the armature called armature copper loss.
So difference between V and
and  is input losses gives the o/p of the armature.
is input losses gives the o/p of the armature.
So  is called electric equivalent of gross mechanical power developed by the armature.
is called electric equivalent of gross mechanical power developed by the armature.
This is denoted as 
Therefore I/P to the armature-armature copper loss = gross mechanical power developed in the armature
DC shunt motor
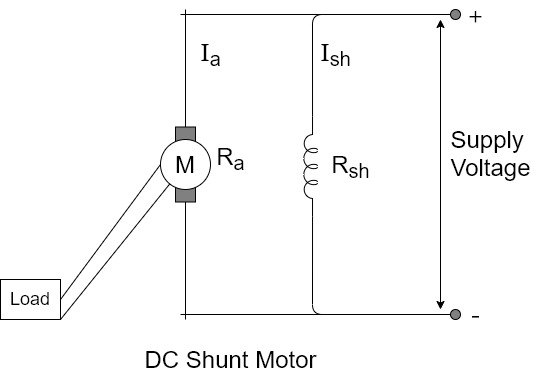
In this type the field winding is connected across the supply as shown in figure
Let  be the resistance of shunt field winding and
be the resistance of shunt field winding and  be the resistance of armature winding.
be the resistance of armature winding.
The value of  very small while
very small while  is quite large. Hence shunt field winding has more number of turns with less cross sectional area.
is quite large. Hence shunt field winding has more number of turns with less cross sectional area.
Voltage and current relationship
The voltage across armature and field winding is same equal to the supply voltage V.
The total current drawn from the supply is denoted as line current 


Now flux produced by the field winding is proportional to the current passing through it i.e. 


As long as supply voltage is constant which is generally so in practice, the flux produced is constant.
Hence D.C. shunt motor is called constant flux motor.
DC series motor
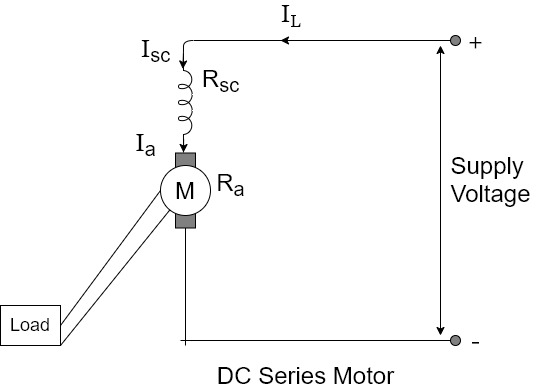
In this type of motor the series field winding is connected in series with armature and the supply as shown in figure. Let  the resistance of all the series field winding then the value of
the resistance of all the series field winding then the value of  is very small and it is made up of small number of turns having large cross section area.
is very small and it is made up of small number of turns having large cross section area.
Voltage and current relationship
Let  be the total current drawn from the supply
be the total current drawn from the supply
So

And,. 

Supply voltage has to overcome the drop across series field building in addition to  drop across armature winding.
drop across armature winding.
In series motor entire armature current is passing through the series field winding. So flux produced is proportional to the armature current.
 for series motor
for series motor
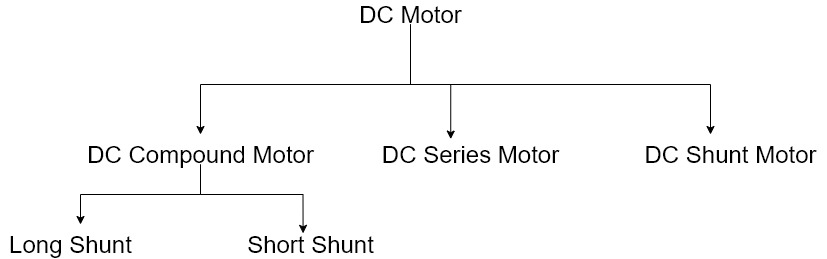
DC compound motor
The compound motor consists of part of the field winding connected in series and part of the field winding connected in parallel with the armature.it is further classified as short shunt compound and long shunt compound motor.
Long shunt compound motor
In this type the shunt field winding is connected across the combination of armature and the series field winding as shown in figure
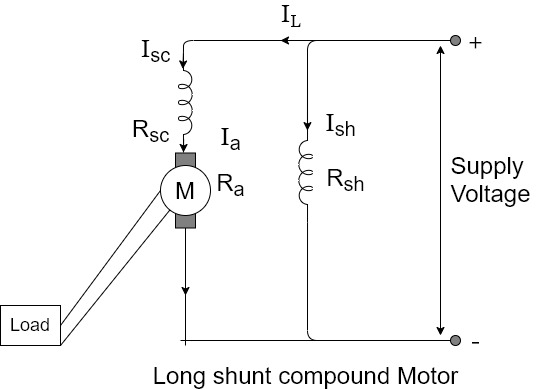
Voltage and current relationship
Let  be the resistance of series field and
be the resistance of series field and  resistance of shunt field winding.
resistance of shunt field winding.
The total current drawn from supply is 
So ,. 
But,
And,
V=
But as


Short shunt compound motor
In this type the shunt field is connected properly in in parallel with armature and the series field is connected in series with the combination as shown in figure.
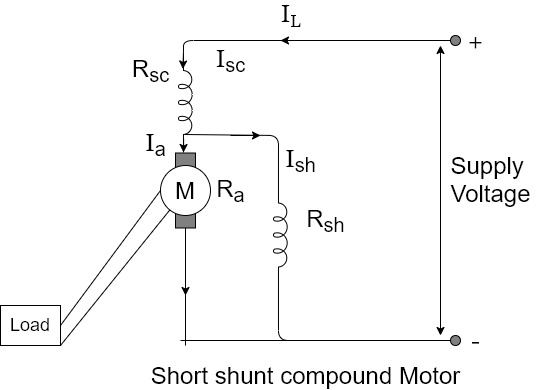
The entire line current is passing through the series field winding

Now the drop across the shunt field winding is to be calculated from the voltage equation

But, 

Drop across shunt field winding=V-

A long shunt compound motor can be of cumulative or differential type. Similarly short shunt compound motor can be cumulative order differential type.
Torque and speed equations
Before analysing the various characteristics of motors, latest device the torque and speed equations as applied to various types of motors
 for the torque equation
for the torque equation
This is because  to a constant for a given motor.
to a constant for a given motor.
Now  is the flux produced by the field winding and is proportional to the current passing through the field winding.
is the flux produced by the field winding and is proportional to the current passing through the field winding.

For a D.C. shunt motor.  Is constant as long as supply voltage is constant. Hence flux is also constant.
Is constant as long as supply voltage is constant. Hence flux is also constant.
 for shunt motors
for shunt motors
For DC series motor  same as
same as  . Hence flux is proportional to the armature current
. Hence flux is proportional to the armature current 

For series motor lly as 
We can write the speed equation as 
 neglecting brush drop
neglecting brush drop
So for shunt motor the flux is constant

While for series motor flux is proportional to 
These relations play an important role in understanding the various characteristics of different type of motors.
Torque equation of a D.C. motor
The turning all twisting force about an exists is called torque.
Consider A wheel of radius R meters coated upon circumferential force F Newton as shown in figure (a)
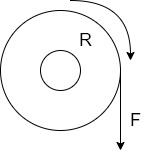
The wheel is rotating at a speed of N r.p.m. then its angular speed is
W =  rad/sec
rad/sec
So work done in one revolution is
W=F×distance travelled in one revolution
= F×  Joules
Joules
P=power developed=
= (F×R) ×
P= T×W watts
Where T=torque in Nm and w = angular speed in rad/sec
Let  the gross torque developed by the armature of the motor. It is also called armature torque.
the gross torque developed by the armature of the motor. It is also called armature torque.
The gross mechanical power developed in the armature is  as seen from the power equation.
as seen from the power equation.
So if speed of the motor is N r.p.m then
Power in armature=armature torque×w i.e.  .
.
But  in a motor is given by
in a motor is given by

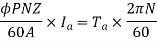

This is the torque equation of D.C. motor
Types of torque in the motor

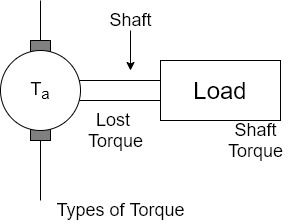
The torque which is available at the shaft for doing the useful work is known as Load torque or shaft torque denoted as

The shaft torque magnitude is always less than the armature torque (
The speed of the motor remains same all along the shaft say N r.p.m. Then the product of shaft torque  and the angular speed w rad/sec is called power available at the shaft i.e. net output of the motor. The maximum power a motor can deliver to the load safety is called output rating of a motor. Generally it is expressed in H.P. it is called H.P rotating of a motor.
and the angular speed w rad/sec is called power available at the shaft i.e. net output of the motor. The maximum power a motor can deliver to the load safety is called output rating of a motor. Generally it is expressed in H.P. it is called H.P rotating of a motor.
Net o/p of motor=Pout= w
w
No load condition of the motor
On no load the load requirement is absent  =0
=0
This does not mean that motor is at half. The motor can rotate at No r.p.m on no load.
The motor draws on armature current of 

Where  is back e.m.f on no load proportional to speed
is back e.m.f on no load proportional to speed 
Now armature torque  for a motor is
for a motor is

As flux is present and armature current is is present, Hence  i.e. armature torque exist on no load.
i.e. armature torque exist on no load.
 but on no load,
but on no load, =0
=0

So on no load motor produces a torque  which satisfies the friction, windage and iron losses of the motor.
which satisfies the friction, windage and iron losses of the motor.
Power developed ( =friction, windage and iron losses
=friction, windage and iron losses
Where  =back emf on no load
=back emf on no load
And  =armature current drawn on no load
=armature current drawn on no load
This component of stray losses i.e.  practically assumed to be constant though the load on the motor is changed from 0 to the fall capacity of the motor.
practically assumed to be constant though the load on the motor is changed from 0 to the fall capacity of the motor.
1) A 4 pole D.C. motor takes a 50A armature current. The armature has lab connected 480 conductors. The flux per Pole is 20 mWb . Calculate the gross torque developed by the armature of the motor.
P=4, A=P=4, Z=480
 =20mWb=
=20mWb=


 Nm
Nm
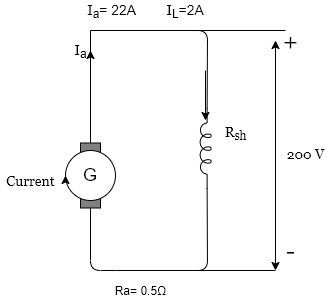
The field current in a D.C. shunt machine is 2A and the line current is 20A at 200V. Calculate the
As a Generator

And line current=20A
These characteristics can be derived from above two characteristics
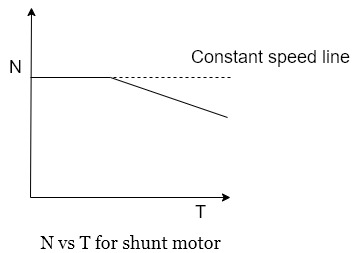
Motor characteristics
This graph is similar to speed armature current characteristics as torque is proportional to the armature current this curve shows that the speed almost remains constant torque changes from no load to full load conditions.
Characteristics of DC series motor
For the series motor the series field winding is carrying the entire armature current hence,

The torque in case of series motor is proportional to the square of the armature current this relation is parabolic in nature as shown in the figure
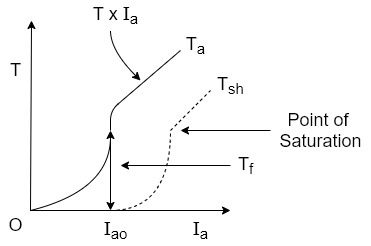
As load increases armature current increases and torque produced increases proportional to the square of the armature current upto a certain limit.
As the entire current passes through the series field there is a property of an electromagnet called saturation may occur.
Saturation means though the current through the winding increases the flux produced remains constant hands after saturation the characteristics take the shape of straight line is flux becomes constant as shown.
The difference between  is loss torque .
is loss torque . shown in figure
shown in figure
Speed armature current characteristics
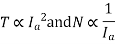
From the speed equation we get
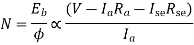
As  in case of series motor
in case of series motor
The values of  are so small that the effect of change in
are so small that the effect of change in  on the speed overrides effect of change in
on the speed overrides effect of change in  on the speed . Hence in the speed equation
on the speed . Hence in the speed equation  and can be assumed constant
and can be assumed constant
So speed equation reduces to

Speed armature current characteristics is rectangular hyperbola type as shown in figure
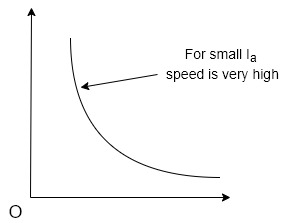
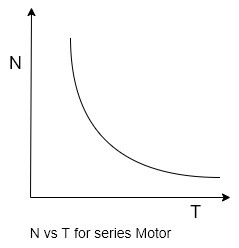
Speed torque characteristics
In case of series motors
Hence we can write 
Thus as torque increases when load increases the speed decreases.
On no load torque is very less and hence speed increases to dangerously high value.
Thus the nature of the speed torque characteristics is similar to the nature of the speed armature current characteristics.
Speed control of DC shunt motor
The set of for speed control of DC shunt motor using the flux control technique is shown in figure.
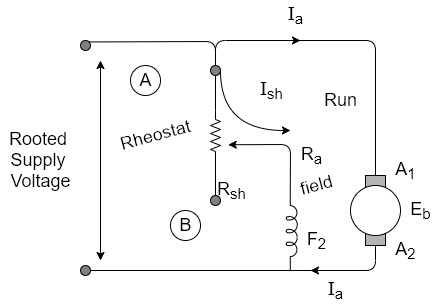
In order to change speed we have to change flux this can be achieved by changing the field current the field current can be changed by changing the value of rheostat R, connected in series with the field winding as shown in figure
See at the time of starting we need to run the motor slowly that means the clock should be maximum because

To obtain maximum Flux the field current should be maximum for this the value of rheostat(R) should be maximum.
Hence at the time of starting the variable point at rheostat is kept at point A and figure (a)
A rated constant supply voltage is applied to the set up so aerated field current will flow.
Hence a rated flux is produced which ultimately result in a rated speed of the motor.
How to very speed?
This speed can be varied by varying the field current as we increase the resistance R of the rheostat by sliding the movable contact from point A to b in figure be the field current decrease.
So the flux decreases this results increasing the motor speed
The variation in speed is shown graphically in figure
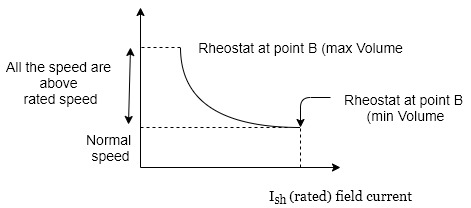
When the rheostat is at point A. The rated field current is supplied and motor rotates at its rated speed.
As R is increased the speed increases.
Note that we use this technique to control the motor speed above its rated value as shown in figure 2
Merits of the flux control methods


Demerits of flux control method
Rheostatic control or armature voltage control technique
The setup for the armature voltage control technique of speed control for DC shunt motor is shown in figure below
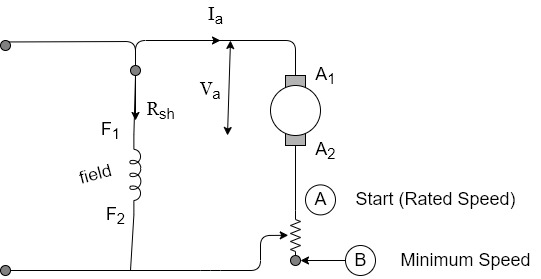
A rheostat R is connected in series with armature winding by varying the value of R we can vary the voltage that appears across the armature.
Since the speed N is directly proportional to armature voltage, it is possible to change the speed by changing the value of rheostat R.
The field winding is connected across the normal voltage v and the field current remains constant hence flux is constant and equal to its rated value.
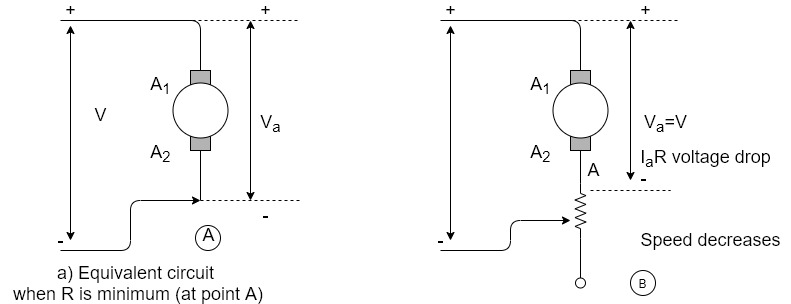
Initially the sliding contact of the Rheostat is adjusted to be at point A. i.e. minimum value of R. The equivalent circuit for this situation is shown figure a
Rotating magnetic field is magnetic field which rotates in space about some point or axis. The North and South poles continuously rotates with a specific speed, called synchronous speed. All poly phase electrical machines are associated with rotating magnetic field in the air gap. Therefore, an understanding of rotating magnetic field produced by poly phase winding is very important to analyze and understand the principle and operation of electrical machine viz. Synchronous Machine and Induction Machine.
Condition for Generation of Rotating Magnetic Field
When a balanced poly phase current flows in the balanced poly phase winding, a rotating magnetic field is produced. The necessary condition for generation of rotating magnetic field is that “the time angle displacement between the currents and space angle displacement between the winding axes must be equal.”
Let us consider an example for better understanding of the above mentioned condition. In the figure below, three coils a, b and c with their magnetic axis coincident are excited by three phase balanced current Imsinωt, Imsin(ωt-120°) and Imsin(ωt+120°).
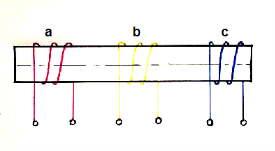
In this case, the time angle displacement between the currents is 120 degree but the space angle displacement between the winding axes zero. Therefore, rotating magnetic field will not be produced.
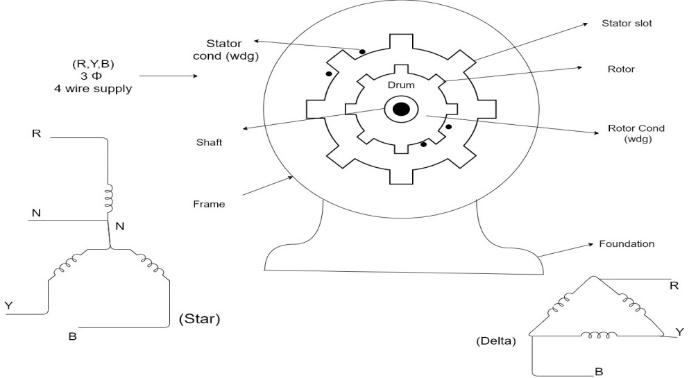
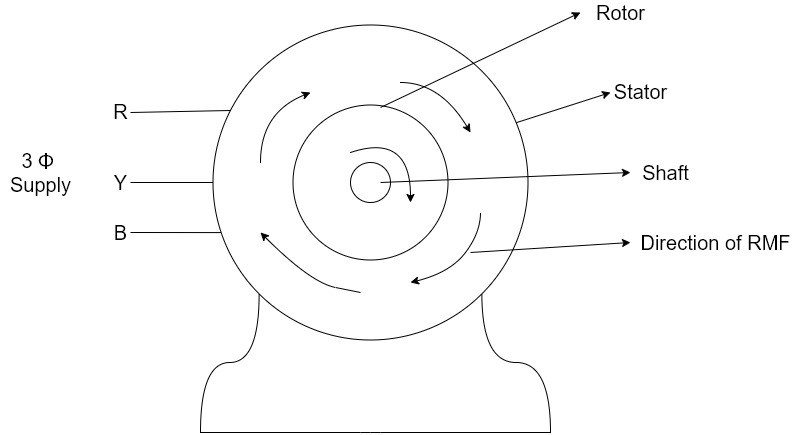
Consider- 3Ф slip ring I.M
Cut section diagram:-

The induction motor has following important parts:-
Principle of operation of induction motor:
Types of induction motor:
Two main types depending upon the rotor
Induction motor are also available in 1Ф supply i.e.
1. Resistance split phase induction motor
2. Capacitor start induction motor
3. Capacitor start capacitor run induction motor
4. 1Ф induction motor i.e. A.C series motors
5. Shaded pole induction motor
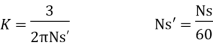
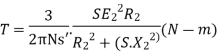
Torque equation of induction motor:-
Torque produced in induction motor depends upon the following factors
1.The rotor power factors ( CosФ) under running condition
2.The rotor current under running condition
3. The part of RMF which induces EMF in rotor wdgi.e. flux (Ф)
We can mathematically say that,
 , As per DC (M) equation
, As per DC (M) equation
But in case of induction motor
Suffix 1 -> used for stator/stator parts (qty)
Suffix 2-> used for rotor/rotor parts(qty)
Therefore,  ----(1)
----(1)
 = flux that induces the EMF in rotor
= flux that induces the EMF in rotor
 = rotor current under running condition
= rotor current under running condition
 = P.F of rotor
= P.F of rotor
But, stator vtg
stator vtg also i.e
also i.e
 ----(2)
----(2)
Transformation ratio i.e. given by 
Therefore,
 and hence
and hence
 also
also
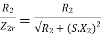
 at slip ’S’ is given by
at slip ’S’ is given by 
And also  at slip ‘S’ is
at slip ‘S’ is  =S.
=S.
Hence  in equation can be replaced by
in equation can be replaced by 
i.e.  U
U
 =
= ----(3)----(
----(3)----( )
)
4 =
= ------(4)
------(4)
Substract (3) and (4) into (1) equation we get,


 (N-m) , Torque equation of I.M.
(N-m) , Torque equation of I.M.
At starting condition slip S=1
So, 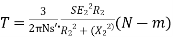
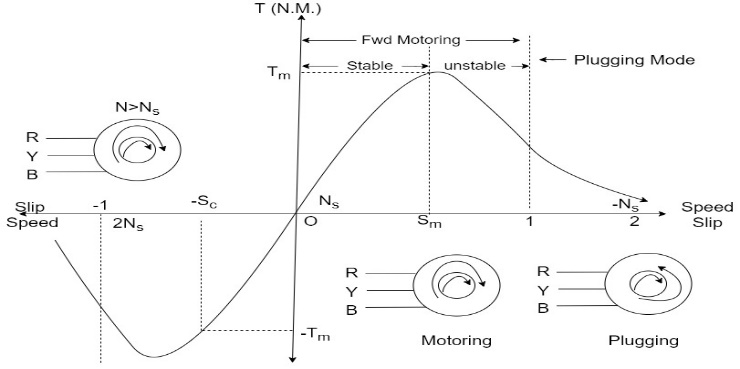
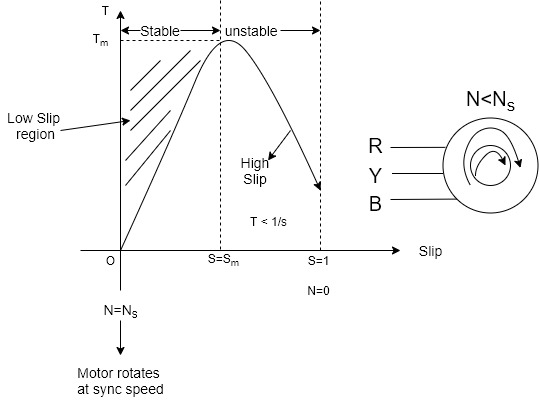
Torque slip region for stable regimen
S= small  -> Negligible
-> Negligible


Unstable:-

 , neglect
, neglect 
 = Constant value
= Constant value
 =high slip region
=high slip region
 and vice versa
and vice versa

Various Torques ;
 at starting s=1 and 4N =0
at starting s=1 and 4N =0
 ----------slip is
----------slip is  i.e..
i.e.. 
Total Torque

 i.e elect
i.e elect  I/P
I/P
2. Elect power to rotor 
3. Gross (Total) Mech. o/p 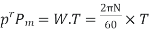
4. Rotor copper losses 
 =doesn’t remain constant ,it depends upon the load applied to motor
=doesn’t remain constant ,it depends upon the load applied to motor
It depends upon the o/p  of (M)
of (M)
 low when motor running at No -10
low when motor running at No -10
In load upto ‘M’ pt.
The maximum  is obtained when
is obtained when
Total Cu losses = Total iron losses

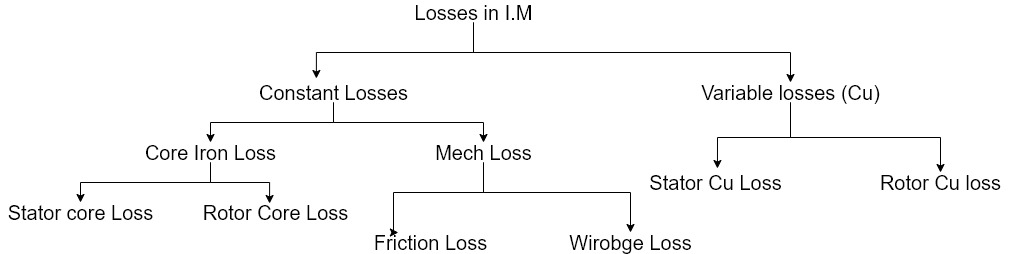
Power stages;



 cross mech. Rotor o/p
cross mech. Rotor o/p
Rotor losses Cu


Rotor o/p
Problems on I.M.
A 4 pole  , 50 Hz Induction motor has rotor resistances and resistance per phase are 0.01
, 50 Hz Induction motor has rotor resistances and resistance per phase are 0.01 and 0.1
and 0.1  respectively . Rotor induced emf at stand still per phase is 57.75 V .If maximum torque is twice that of full load torque then find full load speed of the motor.
respectively . Rotor induced emf at stand still per phase is 57.75 V .If maximum torque is twice that of full load torque then find full load speed of the motor.
Given,
 50Hz I.M.
50Hz I.M.
P=4 F=50 Hz

 57.75V
57.75V


 =
=
 max. slip
max. slip
But, 
Therefore , 




SFL=x=0.0267


1.025 =1
=1


 =1500rpm
=1500rpm
N=(1-

N=1459.95rpm
A 24 pole 50 Hz star connection I.M has rotor resist of 0.016ohm per phase & rotor reactance OF 0.256OHM PER PHASE at stand still conductor .It is achieving its full load torque at a speed of 247rpm.calculate the ratio of


Given P=24 f=50Hz
N=247rpm
 =250rpm
=250rpm

= =0.012
=0.012
S=0.012
Slip that maximum torque 

=0.0625


=
=

4)  Ratio
Ratio





The rotating and stationary parts of an electrical machine can be called as rotor and stator respectively. The rotor or stator of electrical machines acts as a power-producing component and is called as an armature. The electromagnets or permanent magnets mounted on the stator or rotor are used to provide magnetic field of an electrical machine. The generator in which permanent magnet is used instead of coil to provide excitation field is termed as permanent magnet synchronous generator or also simply called as synchronous generator.
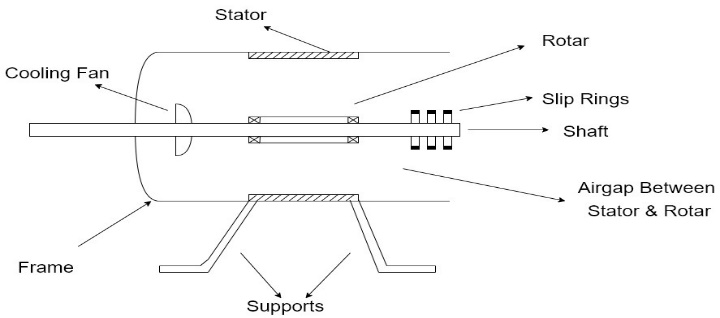
Construction of Synchronous Generator
In general, synchronous generator consists of two parts rotor and stator. The rotor part consists of field poles and stator part consists of armature conductors. The rotation of field poles in the presence of armature conductors induces an alternating voltage which results in electrical power generation.
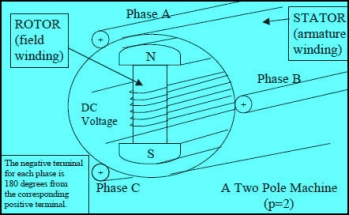
Construction of Synchronous Generator
The speed of field poles is synchronous speed and is given by
Ns = 120f/P
Where, ‘f’ indicates alternating current frequency and ‘P’ indicates number of poles.
Synchronous Generator Working Principle
The principle of operation of synchronous generator is electromagnetic induction. If there exists a relative motion between the flux and conductors, then an emf is induced in the conductors. To understand the synchronous generator working principle, let us consider two opposite magnetic poles in between them a rectangular coil or turn is placed as shown in the below figure.
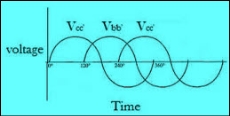
Now, if we consider a practical synchronous generator, then field magnets rotate between the stationary armature conductors. The synchronous generator rotor and shaft or turbine blades are mechanically coupled to each other and rotate at synchronous speed. Thus, the magnetic flux cutting produces an induced emf which causes the current flow in armature conductors. Thus, for each winding the current flows in one direction for the first half cycle and current flows in the other direction for the second half cycle with a time lag of 120 degrees (as they displaced by 120 degrees). Hence, the output power of synchronous generator can be shown as below figure.
References:




