Unit – 4
Multivariable Calculus (Differentiation)
Limits-
The function f (x, y) is said to tend to limit ‘l’, as x →a and y→b If the limit is dependent on point (x, y) as x →a and y→b
We can write this as,
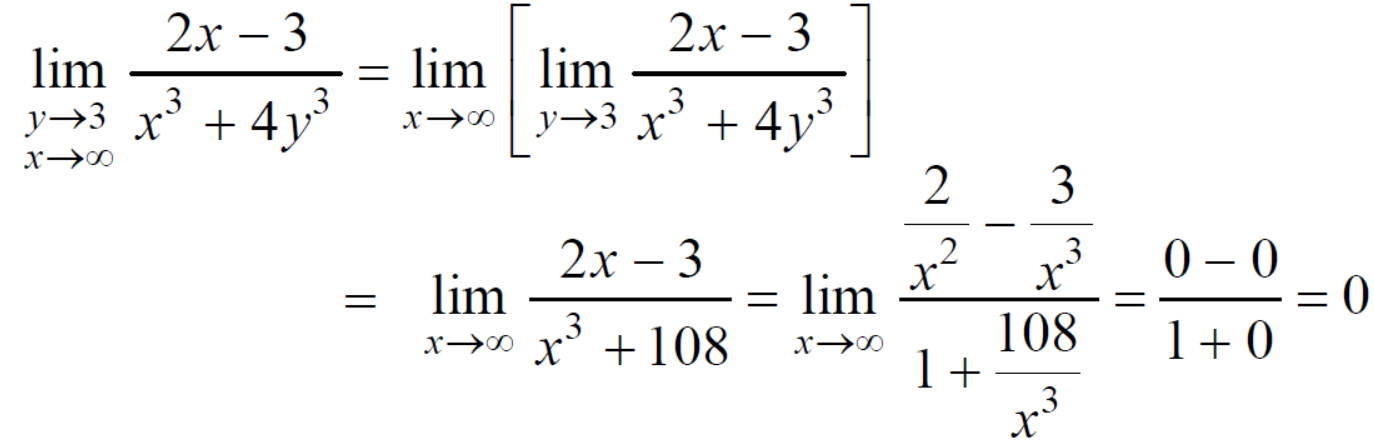
Example-1: Evaluate the 
Sol. We can simply find the solution as follows,

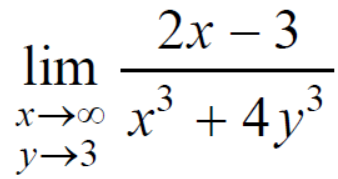
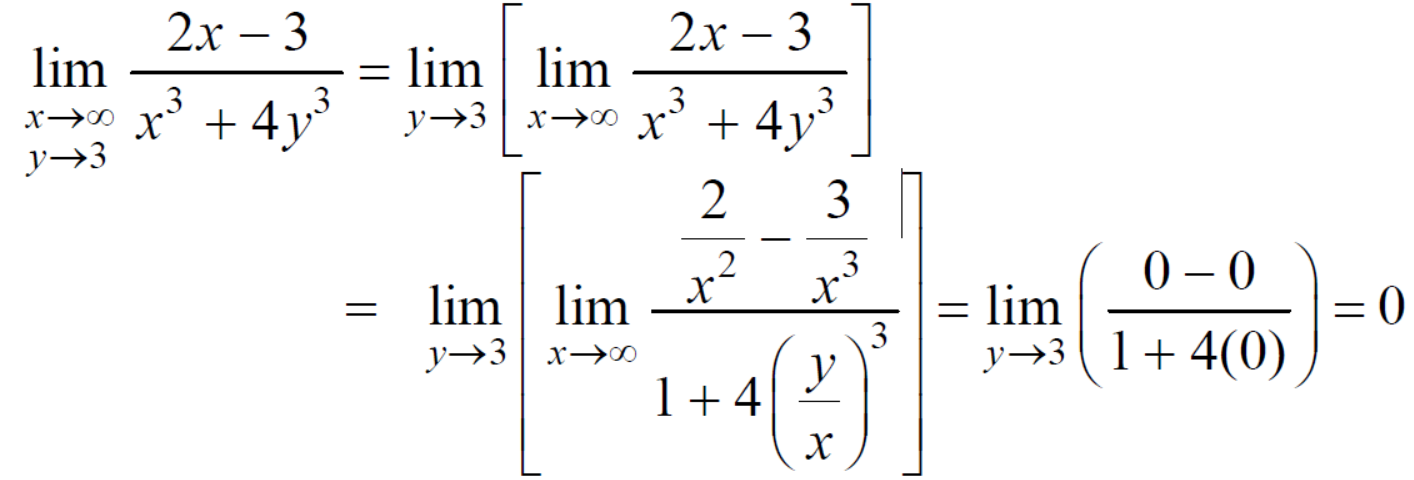
Example-2: Evaluate 
Sol.
 -6.
-6.
Example-3: evaluate 
Sol.

Conitinuity –
At point (a,b) , a function f(x,y) is said to be continuous if,

Working rule for continuity-
Step-1: f(a,b) should be well defined.
Step-2:  should exist.
should exist.
Step-3: 
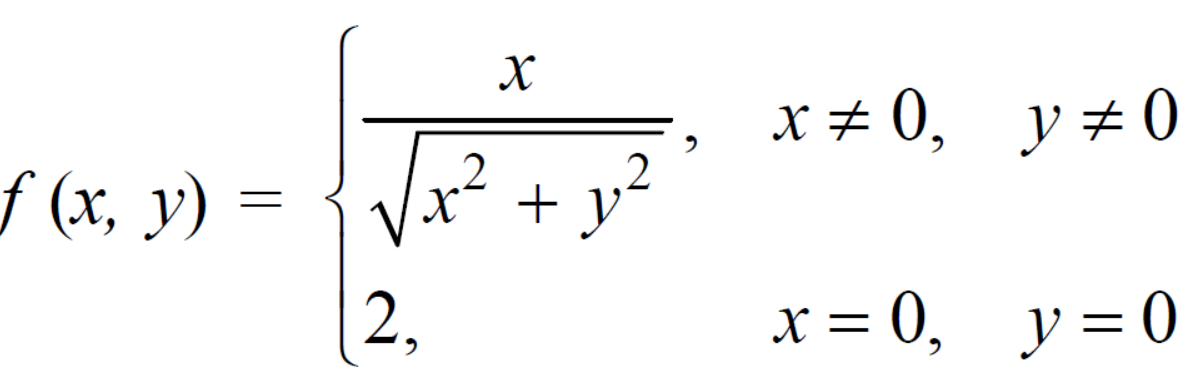
Example-1: Test the continuity of the following function-
Sol. (1) the function is well defined at (0,0)
(2) check for the second step,

That means the limit exists at (0,0)
Now check step-3:

So that the function is continuous at origin.
Example-2: check for the continuity of the following function at origin,
Sol. (1) Here the function is well defined at (0,0)
(2) check for second step-

Limit f is not unique for different values of m
So that the limit does not exists.
Therefore, the function is not continuous at origin.
Steps to check for existence of limit-
Step-1: find the value of f(x,y) along x →a and y→b
Step-2: find the value of f (x, y) along x →b and y→a
Note- if the values in step -1 and step-2 are same then we can say that the limits exist otherwise not.
Step-3: if a →0 and b→0 then find the limit along y =mx, if the value does not contain m, then limit exist, if it contains m then the limit does not exist.
Note-1- put x = 0 and y = 0 in f, then find f1
2 - Put y = 0 and x = 0 In f then find x2
If f1 and f2 are equal then limit exist otherwise not.
3- put y = mx then find f3
If f1 = f2 ≠f3, limit does not exist.
4- put y = mx² and find f4,
If f1 = f2 = f3 ≠ f4, limit does not exist
If f1 = f2 = f3 = f4, limit exist.
Example-1: Evaluate 
Sol . 1. 
2. 
Here f1 = f2
3. Now put y = mx, we get

Here f1 = f2 = f3
Now put y = mx²
4. 
Therefore,
F1 = f2 = f3 =f4
We can say that the limit exists with 0.
Example-2: evaluate the following-
Sol. First, we will calculate f1 –
Here we see that f1 = 0
Now find f2,
Here , f1 = f2
Therefore the limit exists with value 0.
Partial derivatives-
First order partial differentiation-
Let f (x, y) be a function of two variables. Then the partial derivative of this function with respect to x can be written as  and defined as follows:
and defined as follows:
 =
= 
Now the partial derivative of f with respect to f can be written as  and defined as follows:
and defined as follows:
 =
= 
Note: a. while calculating partial derivatives treat all independent variables, other than the variable with respect to which we are differentiating, as constant.
b. we apply all differentiation rules.
Higher order partial differentiation-
Let f (x, y) be a function of two variables. Then its second-order partial derivatives, third order partial derivatives and so on are referred as higher order partial derivatives.
These are second order four partial derivatives:
(a)  =
= 
(b)  =
= 
(c)  =
= 
(d)  =
= 
b and c are known as mixed partial derivatives.
Similarly, we can find the other higher order derivatives.
Example-1: - Calculate  and
and  for the following function
for the following function
f (x, y) = 3x³-5y²+2xy-8x+4y-20
Sol. To calculate  treat the variable y as a constant, then differentiate f (x, y) with respect to x by using differentiation rules,
treat the variable y as a constant, then differentiate f (x, y) with respect to x by using differentiation rules,
 =
=  [3x³-5y²+2xy-8x+4y-20]
[3x³-5y²+2xy-8x+4y-20]
=  3x³] -
3x³] -  5y²] +
5y²] +  [2xy] -
[2xy] - 8x] +
8x] + 4y] -
4y] -  20]
20]
= 9x² - 0 + 2y – 8 + 0 – 0
= 9x² + 2y – 8
Similarly partial derivative of f (x, y) with respect to y is:
 =
=  [3x³-5y²+2xy-8x+4y-20]
[3x³-5y²+2xy-8x+4y-20]
=  3x³] -
3x³] -  5y²] +
5y²] +  [2xy] -
[2xy] - 8x] +
8x] + 4y] -
4y] -  20]
20]
= 0 – 10y + 2x – 0 + 4 – 0
= 2x – 10y +4.
Example-2: Calculate  and
and  for the following function
for the following function
f (x, y) = sin (y²x + 5x – 8)
Sol. To calculate  treat the variable y as a constant, then differentiate f (x, y) with respect to x by using differentiation rules,
treat the variable y as a constant, then differentiate f (x, y) with respect to x by using differentiation rules,

 [sin (y²x + 5x – 8)]
[sin (y²x + 5x – 8)]
= cos (y²x + 5x – 8) (y²x + 5x – 8)
(y²x + 5x – 8)
= (y² + 50) cos (y²x + 5x – 8)
Similarly partial derivative of f (x, y) with respect to y is,

 [sin (y²x + 5x – 8)]
[sin (y²x + 5x – 8)]
= cos (y²x + 5x – 8) (y²x + 5x – 8)
(y²x + 5x – 8)
= 2xy cos (y²x + 5x – 8)
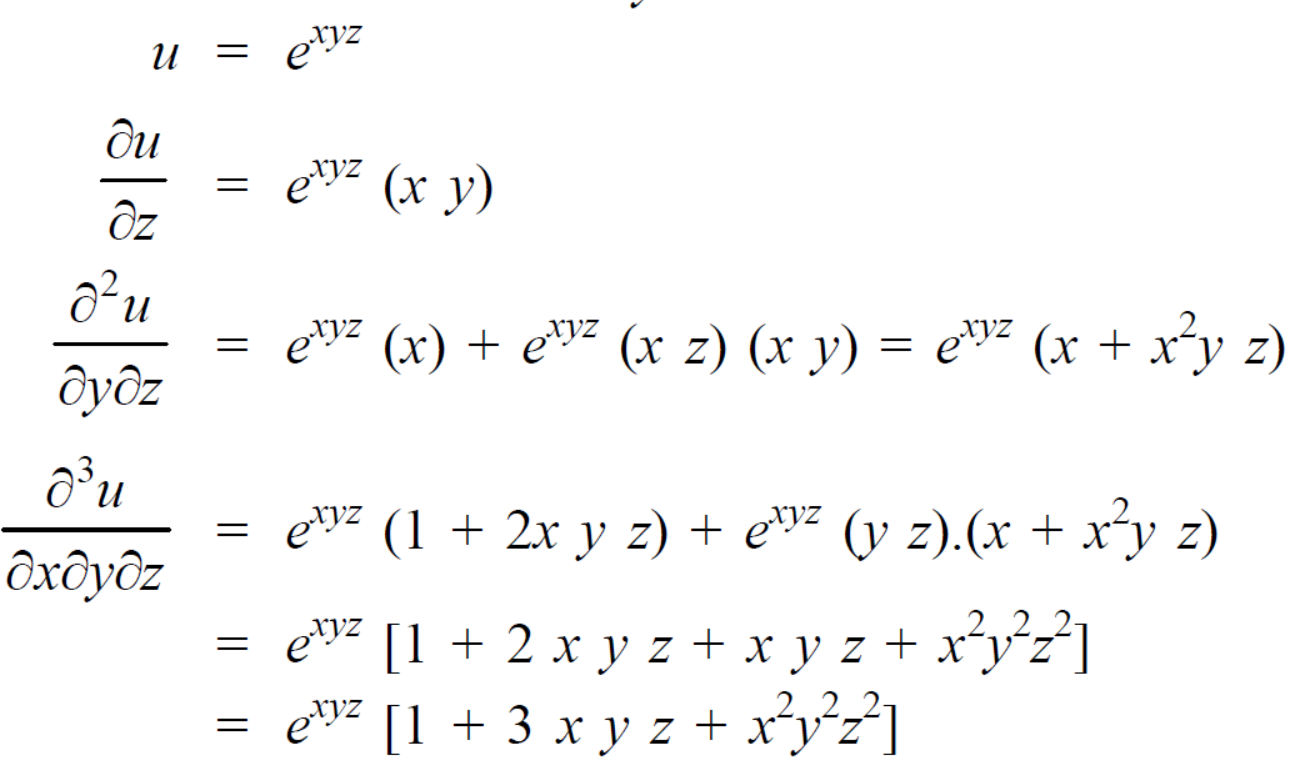
Example-3: Obtain all the second order partial derivative of the function:
f (x, y) = (x³y² - xy⁵)
Sol.  3x²y² - y⁵,
3x²y² - y⁵,  2x³y – 5xy⁴,
2x³y – 5xy⁴,
 =
=  = 6xy²
= 6xy²
 =
=  2x³ - 20xy³
2x³ - 20xy³
 =
=  = 6x²y – 5y⁴
= 6x²y – 5y⁴
 =
=  = 6x²y - 5y⁴
= 6x²y - 5y⁴
Example-4: Find

Sol. First, we will differentiate partially with respect to r,


Now differentiate partially with respect to θ, we get


Example-5: if,
then find.
Sol-
Example-6: if  , then show that-
, then show that- 
Sol. Here we have,
u =  …………………..(1)
…………………..(1)
now partially differentiate eq. (1) w.r.t to x and y, we get
= 
Or

 ………………..(2)
………………..(2)
And now,

= 
 ………………….(3)
………………….(3)
Adding eq. (1) and (3), we get

 = 0
= 0
Hence proved.
Directional derivative
Let ϕ be a scalar point function and let ϕ(P) and ϕ(Q) be the values of ϕ at two neighbouring points P and Q in the field. Then,
 ,
, are the directional derivative of ϕ in the direction of the coordinate axes at P.
are the directional derivative of ϕ in the direction of the coordinate axes at P.
The directional derivative of ϕ in the direction l, m, n=l  + m
+ m +
+ 
The directional derivative of ϕ in the direction of  =
= 
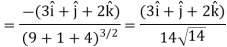
Example: Find the directional derivative of 1/r in the direction  where
where 
Sol. Here 
Now,



And 
We know that-

So that-

Now,
Directional derivative = 
Example: Find the directional derivative of

At the points (3, 1, 2) in the direction of the vector  .
.
Sol. Here it is given that-




Now at the point (3, 1, 2)-
Let  be the unit vector in the given direction, then
be the unit vector in the given direction, then

 at (3, 1, 2)
at (3, 1, 2)
Now,


Example: Find the directional derivatives of  at the point P (1, 1, 1) in the direction of the line
at the point P (1, 1, 1) in the direction of the line 
Sol. Here




Direction ratio of the line  are 2, -2, 1
are 2, -2, 1
Now directions cosines of the line are-

Which are 
Directional derivative in the direction of the line-

When we measure the rate of change of the dependent variable owing to any change in a variable on which it depends, when none of the variable is assumed to be constant.
Let the function, u = f (x, y), such that x = g(t), y = h(t)
ᵡ Then we can write,
 =
= 
= 
This is the total derivative of u with respect to t.
Change of variable-
If w = f (x, y) has continuous partial variables fx and fy and if x = x (t), y = y (t) are
Differentiable functions of t, then the composite function w = f (x (t), y (t)) is a
Differentiable function of t.
In this case, we get,
 fx (x (t), y (t)) x’ (t) + fy (x(t), y (t)) y’ (t).
fx (x (t), y (t)) x’ (t) + fy (x(t), y (t)) y’ (t).
Example-:1 let q = 4x + 3y and x = t³ + t² + 1, y = t³ - t² - t
Then find  .
.
Sol.:  . =
. = 
Where, f1 =  , f2 =
, f2 = 
In this example f1 = 4, f2 = 3
Also,  3t² + 2t,
3t² + 2t, 
 4(3t² + 2t) + 3(
4(3t² + 2t) + 3(
= 21t² + 2t – 3
Example-2: Find  if u = x³y⁴ where x = t³ and y = t².
if u = x³y⁴ where x = t³ and y = t².
Sol. as we know that by definition,  =
= 
 3x²y⁴3t² + 4x³y³2t = 17t¹⁶.
3x²y⁴3t² + 4x³y³2t = 17t¹⁶.
Example-3: if w = x² + y – z + sent and x + y = t, find
(a)  y, z
y, z
(b)  t, z
t, z
Sol. With x, y, z independent, we have
t = x + y, w = x² + y - z + sin (x + y).
Therefore,
 y, z = 2x + cos(x+y)
y, z = 2x + cos(x+y) (x+y)
(x+y)
= 2x + cos (x + y)
With x, t, z independent, we have
Y = t-x, w= x² + (t-x) + sin t
thus  t, z = 2x - 1
t, z = 2x - 1
Example-4: If u = u (y – z, z - x, x – y) then prove that  = 0
= 0
Sol. Let,

Then,

By adding all these equations, we get,
 = 0 hence proved.
= 0 hence proved.
Example-5: if φ (cx – az, cy – bz) = 0 then show that ap + bq = c
Where p =  q =
q = 
Sol. We have,
φ (cx – az, cy – bz) = 0
φ (r, s) = 0
where,
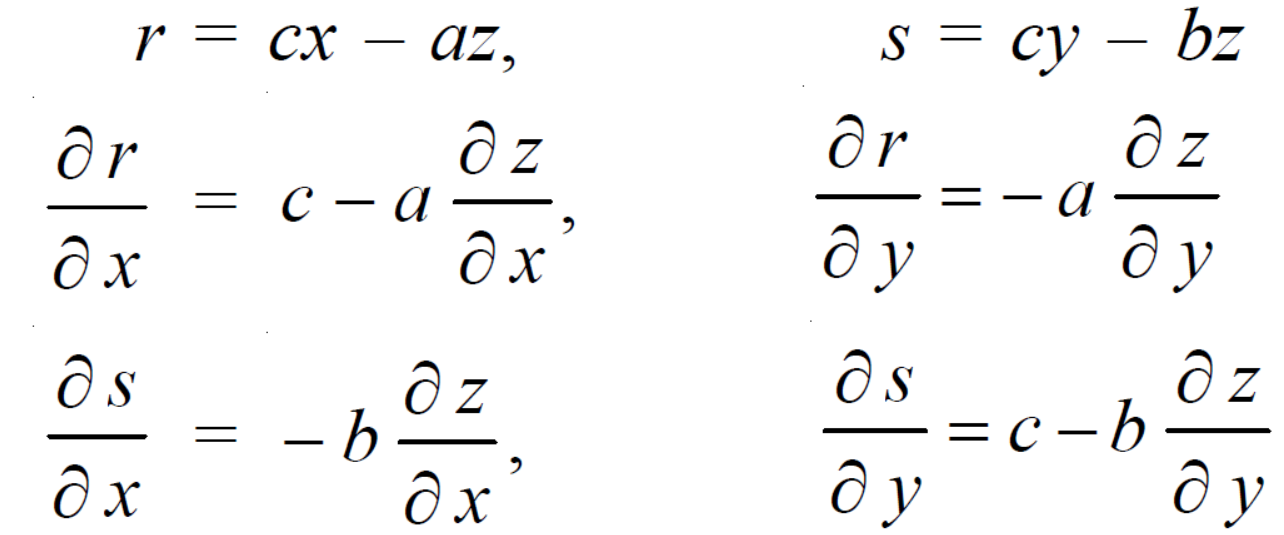
We know that,
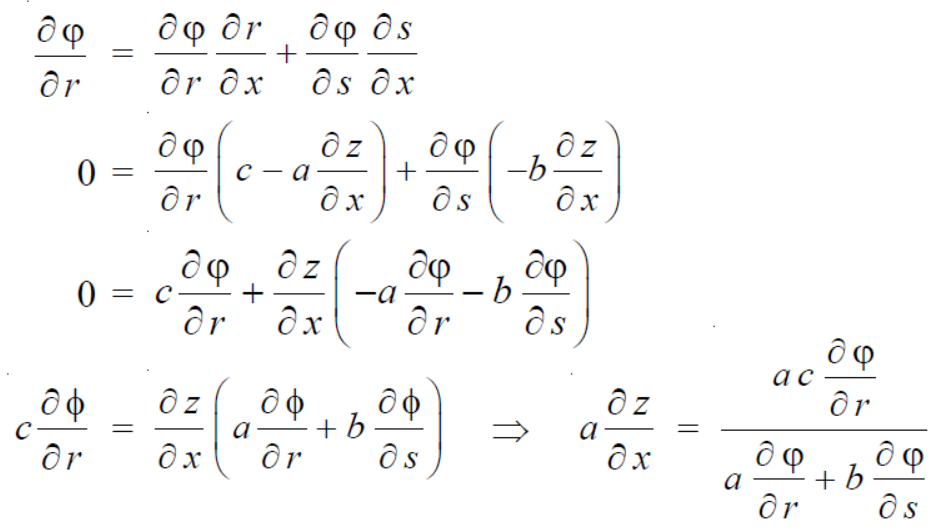
Again, we do,
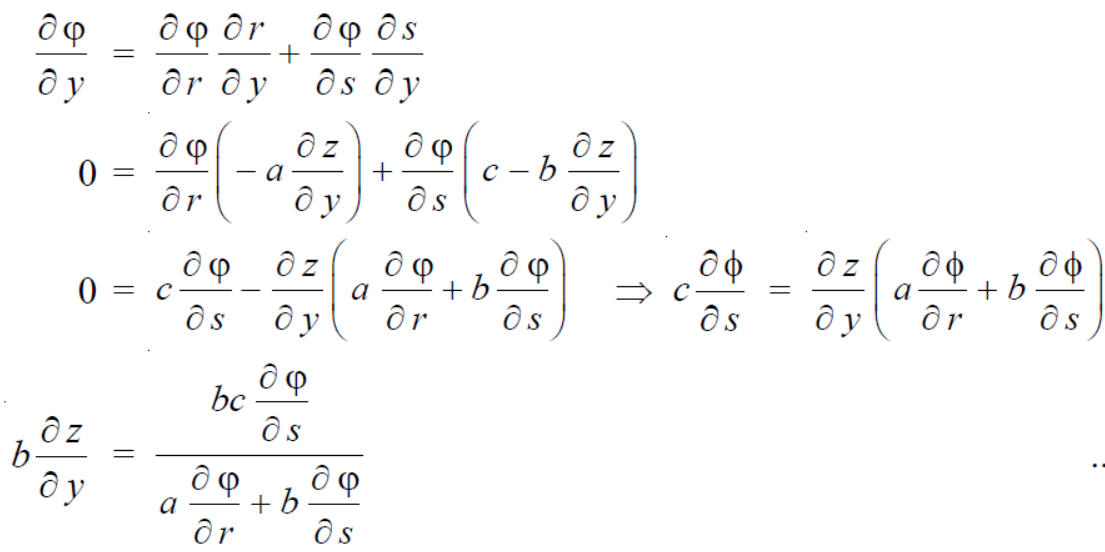
By adding the two results, we get
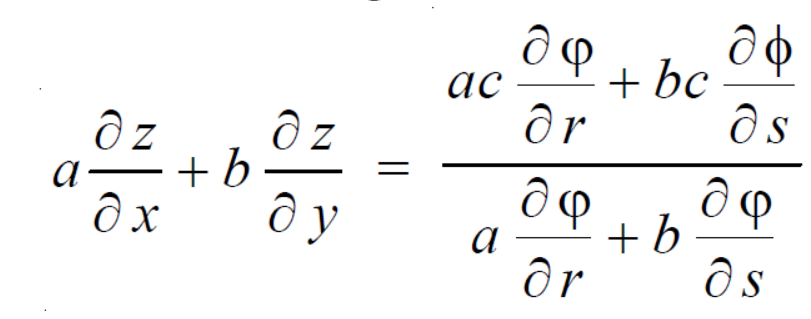

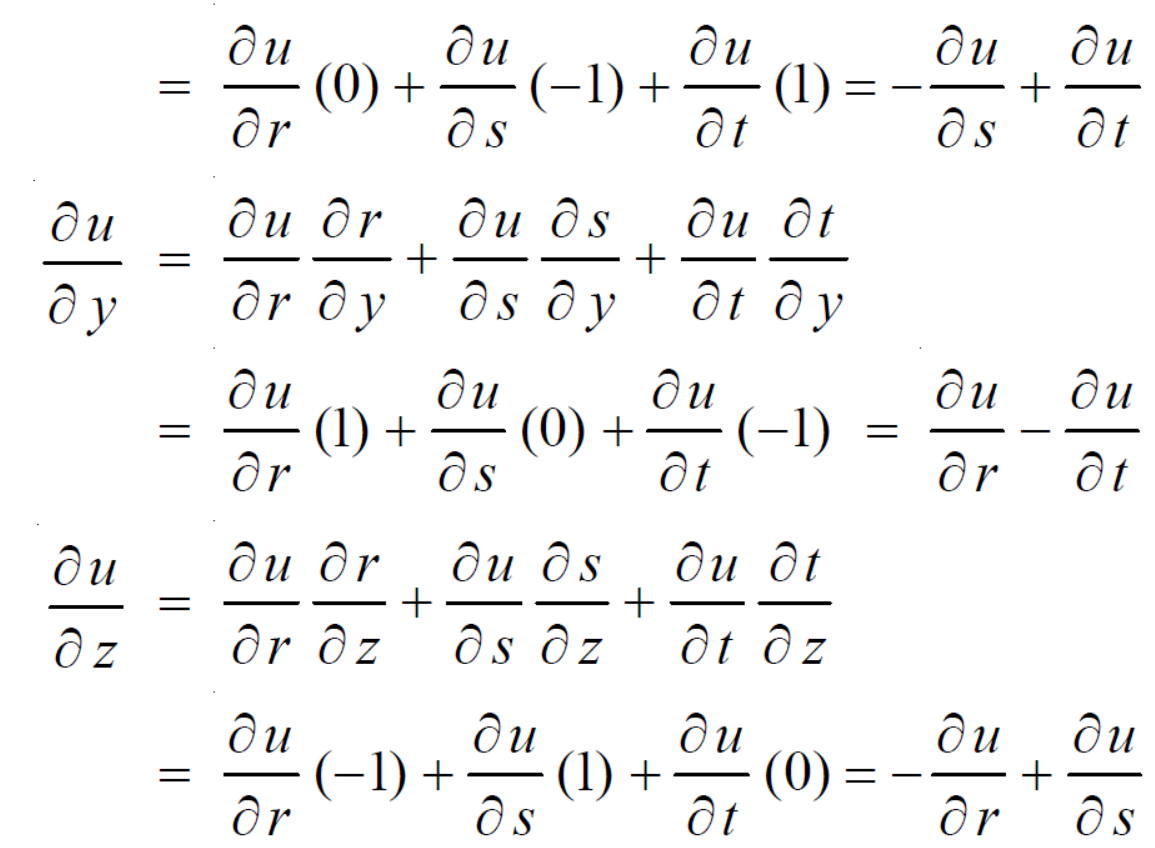
Example-6: If z is the function of x and y , and x =  , y =
, y =  , then prove that,
, then prove that,
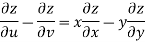
Sol. Here , it is given that, z is the function of x and y & x , y are the functions of u and v.
So that,
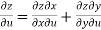 ……………….(1)
……………….(1)
And,
 ………………..(2)
………………..(2)
Also there is,
x =  and y =
and y =  ,
,
Now,
 ,
,  ,
,  ,
, 
From equation(1) , we get
 ……………….(3)
……………….(3)
And from eq. (2) , we get
 …………..(4)
…………..(4)
Subtracting eq. (4) from (3), we get

 =
=  )
)  – (
– (
= x
Hence proved.
Differentiability-
Let f(x) be a single valued function of the variable x, then,
f’(x) = 
provided that the limit exists and is dependent of the path along which 
Example: suppose that the function,
f(z) = 4x + y + i (-x + 4y)
discuss df/dz.
Sol. Here,


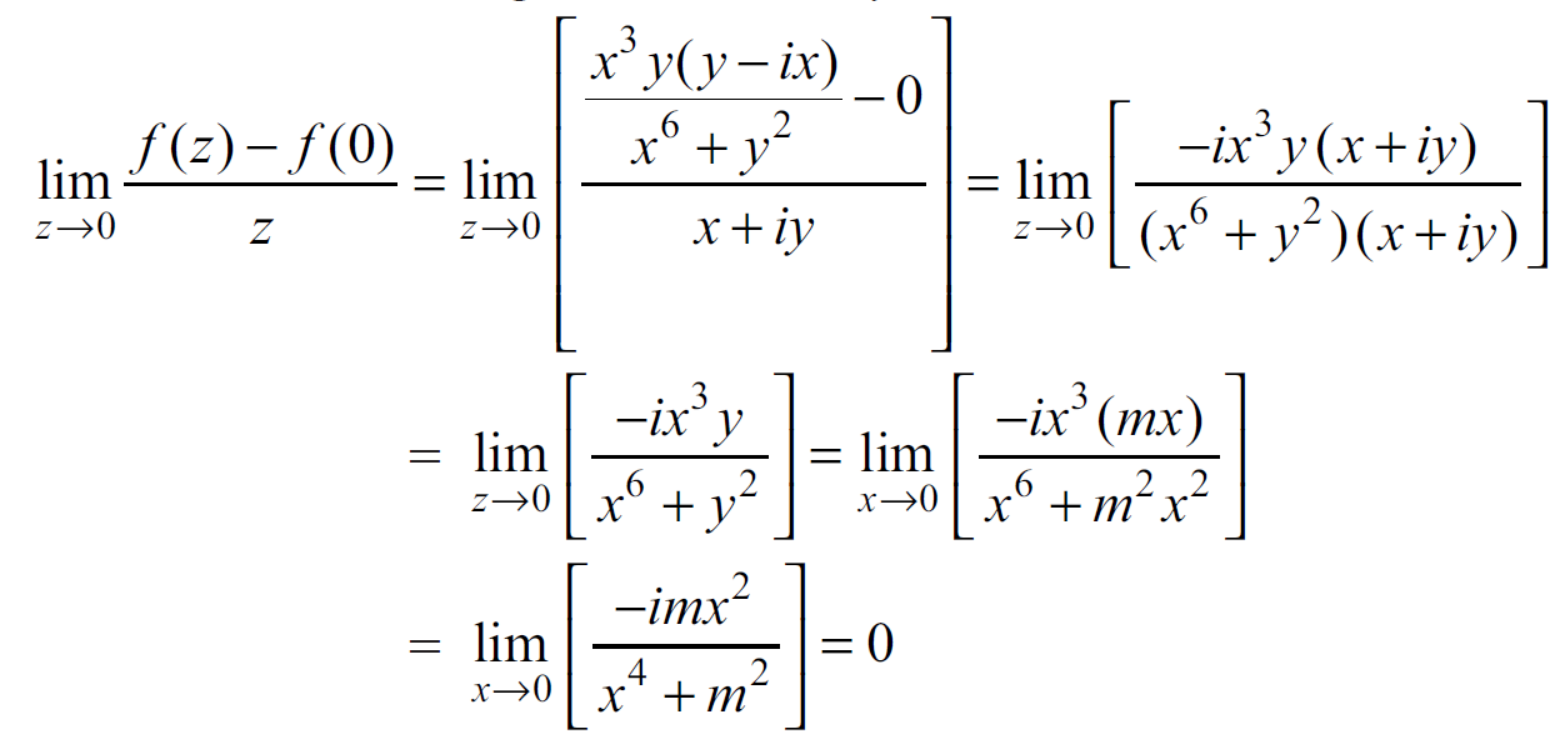
Example-2: if
Then df/dz , z = 0.
Sol.
Equation of a tangent plane-

And
Equation of the normal to the plane-
Example: Find the equation of the tangent plane and normal line to the surface 
Sol.
Here,

At point (1, 2, -1)-
Therefore, the equation of the tangent plane at (1, 2, -1) is-



Equation of normal line is-
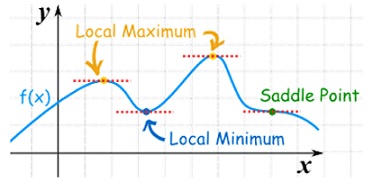
As we know that the value of a function at maximum point is called maximum value of a function. Similarly, the value of a function at minimum point is called minimum value of a function.
The maxima and minima of a function is an extreme biggest and extreme smallest point of a function in a given range (interval) or entire region. Pierre de Fermat was the first mathematician to discover general method for calculating maxima and minima of a function. The maxima and minima are complement of each other.
Maxima and Minima of a function of one variable
If f(x) is a single valued function defined in a region R then
Maxima is a maximum point  if and only if
if and only if 
Minima is a minimum point  if and only if
if and only if 
Maxima and Minima of a function of two independent variables
Let  be a defined function of two independent variables.
be a defined function of two independent variables.
Then the point  is said to be a maximum point of
is said to be a maximum point of  if
if

Or  =
= 
For all positive and negative values of h and k.
Similarly, the point  is said to be a minimum point of
is said to be a minimum point of  if
if

Or  =
= 
For all positive and negative values of h and k.
Saddle point: Critical points of a function of two variables are those points at which both partial derivatives of the function are zero. A critical point of a function of a single variable is either a local maximum, a local minimum, or neither. With functions of two variables there is a fourth possibility - a saddle point.
A point is a saddle point of a function of two variables if
![2 2 [ 2 ] 2
@f-= 0, @f--= 0, and @-f- @-f-- -@-f- < 0
@x @y @x2 @y2 @x @y](https://glossaread-contain.s3.ap-south-1.amazonaws.com/epub/1643035949_7697506.png)
at the point.
Stationary Value
The value  is said to be a stationary value of
is said to be a stationary value of  if
if

i.e., the function is a stationary at (a, b).
Rule to find the maximum and minimum values of 



4. (a) If 
(b) If 
(c) If 
(d) If 
Example1 Find out the maxima and minima of the function

Given  …(i)
…(i)
Partially differentiating (i) with respect to x we get
 ….(ii)
….(ii)
Partially differentiating (i) with respect to y we get
 ….(iii)
….(iii)
Now, form the equations 
Using (ii) and (iii) we get


 using above two equations
using above two equations
Squaring both sides, we get

Or 
This show that 
Also, we get 
Thus, we get the pair of value as 
Now, we calculate

Putting above values in

At point (0,0) we get

So, the point (0,0) is a saddle point.
At point  we get
we get

So, the point  is the minimum point where
is the minimum point where 
In case 

So, the point  is the maximum point where
is the maximum point where 
Example2 Find the maximum and minimum point of the function

Partially differentiating given equation with respect to and x and y then equate them to zero


On solving above we get 
Also 
Thus, we get the pair of values (0,0), ( ,0) and (0,
,0) and (0,
Now, we calculate



At the point (0,0)

So, function has saddle point at (0,0).
At the point (

So, the function has maxima at this point ( .
.
At the point (0,

So, the function has minima at this point (0, .
.
At the point (

So, the function has a saddle point at (
Example3 Find the maximum and minimum value of 
Let 
Partially differentiating given function with respect to x and y and equate it to zero
 ..(i)
..(i)
 ..(ii)
..(ii)
On solving (i) and (ii) we get

Thus, pair of values are 
Now, we calculate



At the point (0,0)

So further investigation is required
On the x axis y = 0, f(x,0) =0
On the line y=x, 
At the point 

So that the given function has maximum value at 
Therefore, maximum value of given function

At the point 

So that the given function has minimum value at 
Therefore, minimum value of the given function

Let  be a function of x, y, z which to be discussed for stationary value.
be a function of x, y, z which to be discussed for stationary value.
Let  be a relation in x, y, z
be a relation in x, y, z
 for stationary values we have,
for stationary values we have,
i.e.,  … (1)
… (1)
Also, from  we have
we have
 … (2)
… (2)
Let ‘ ’ be undetermined multiplier then multiplying equation (2) by
’ be undetermined multiplier then multiplying equation (2) by  and adding in equation (1) we get,
and adding in equation (1) we get,

 … (3)
… (3)
 … (4)
… (4)
 … (5)
… (5)
Solving equation (3), (4) (5) & we get values of x, y, z and  .
.
Solution:
Let x, y, z be the three parts of ‘a’ then we get.
 … (1)
… (1)
Here we have to maximize the product
i.e., 
 By Lagrange’s undetermined multiplier, we get,
By Lagrange’s undetermined multiplier, we get,

 … (2)
… (2)
 … (3)
… (3)
 … (4)
… (4)
i.e.
 … (2)’
… (2)’
 … (3)’
… (3)’
 … (4)
… (4)



And 


From (1)



Thus  .
.
Hence their maximum product is  .
.
2. Find the point on plane  nearest to the point (1, 1, 1) using Lagrange’s method of multipliers.
nearest to the point (1, 1, 1) using Lagrange’s method of multipliers.
Solution:
Let  be the point on sphere
be the point on sphere  which is nearest to the point
which is nearest to the point  . Then shortest distance.
. Then shortest distance.


 Let
Let 
Under the condition  … (1)
… (1)
 By method of Lagrange’s undetermined multipliers, we have
By method of Lagrange’s undetermined multipliers, we have

 … (2)
… (2)

 … (3)
… (3)
i.e.,  &
&

 … (4)
… (4)
From (2) we get 
From (3) we get 
From (4) we get 
 Equation (1) becomes
Equation (1) becomes

i.e., 



y = 2

Suppose f (x, y, z) be the scalar function and it is continuously differentiable then the vector-
Is called gradient of f and we can write is as grad f.
So that-
Here  is a vector which has three components
is a vector which has three components 
Properties of gradient-
Property-1: 
Proof:
First, we will take left hand side
L.H.S = 
= 
= 
= 
Now taking R.H.S,
R.H.S. = 
= 
= 
Here- L.H.S. = R.H.S.
Hence proved.
Property-2: Gradient of a constant (
Proof:
Suppose 
Then 
We know that the gradient-

= 0
Property-3: Gradient of the sum and difference of two functions-
If f and g are two scalar point functions, then

Proof:
L.H.S 




Hence proved
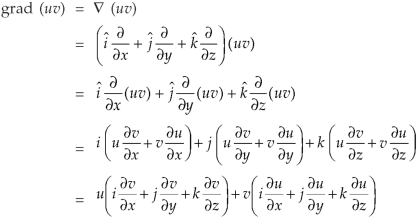
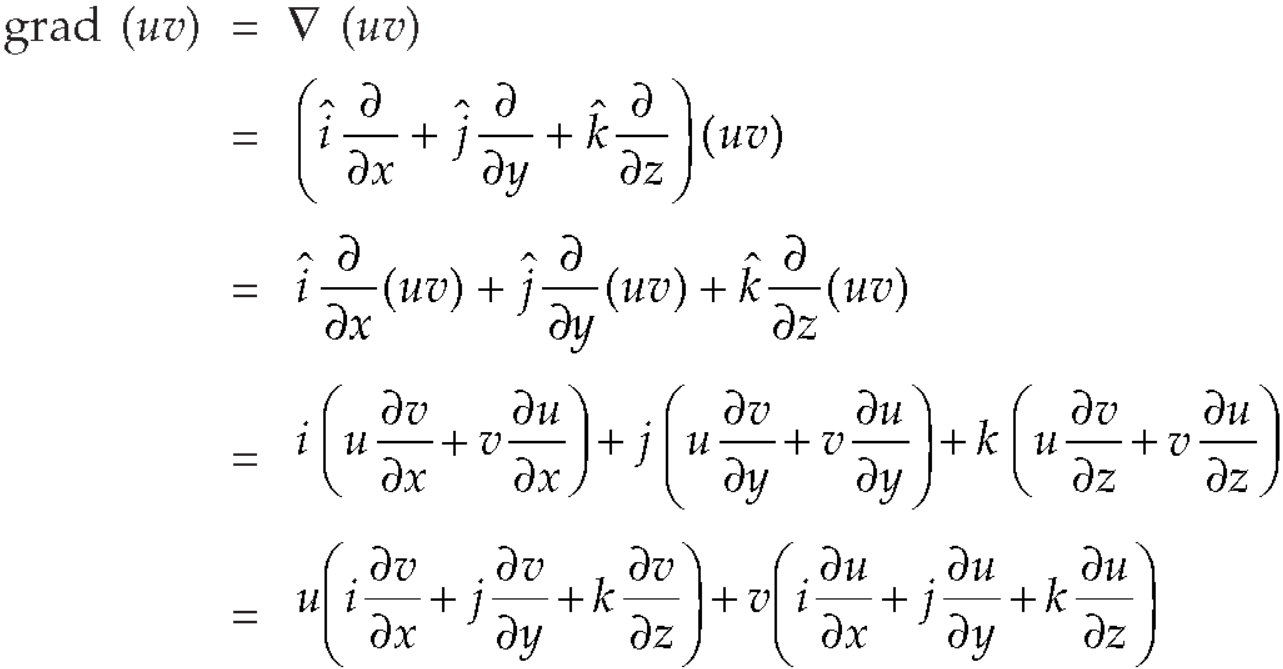
Property-4: Gradient of the product of two functions
If f and g are two scalar point functions, then

Proof:



So that-

Hence proved.
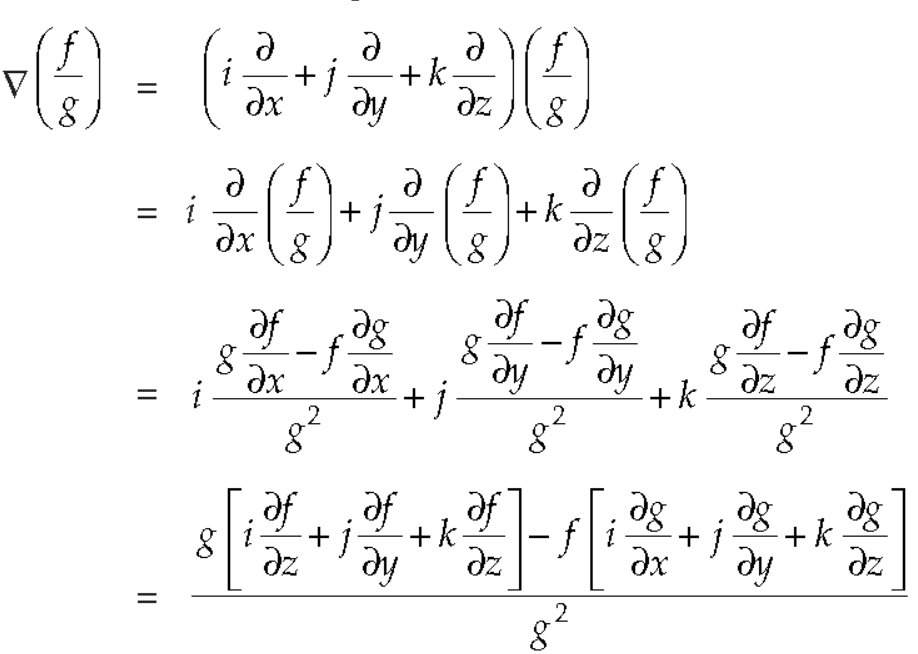
Property-5: Gradient of the quotient of two functions-
If f and g are two scalar point functions, then-
Proof:
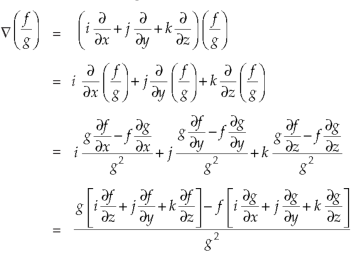
So that-
Example-1: If  , then show that
, then show that
1. 
2. 
Sol.
Suppose  and
and 

Now taking L.H.S,

Which is 
Hence proved.
2. 
So that
Example: If  then find grad f at the point (1, -2, -1).
then find grad f at the point (1, -2, -1).
Sol.



Now grad f at (1, -2, -1) will be-


Example: If  then prove that grad u, grad v and grad w are coplanar.
then prove that grad u, grad v and grad w are coplanar.
Sol.
Here- 


Now-

Apply 


Which becomes zero.
So that we can say that grad u, grad v and grad w are coplanar vectors.
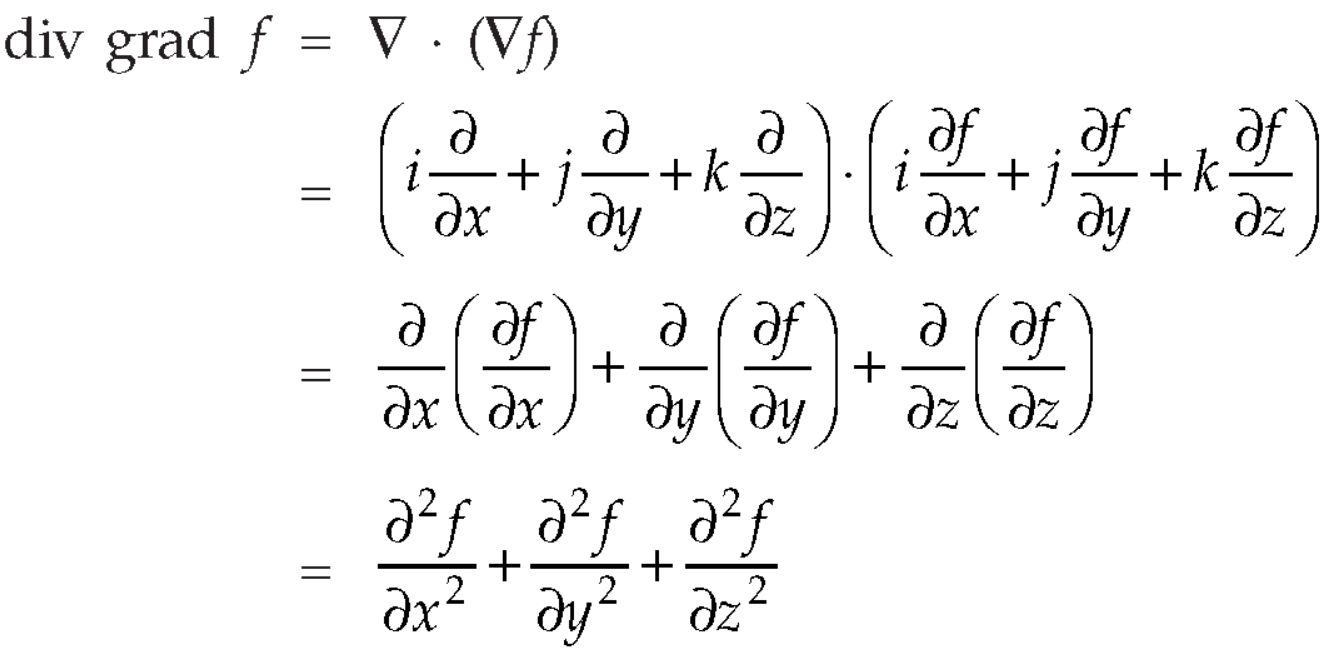
Divergence (Definition)-
Suppose  is a given continuous differentiable vector function then the divergence of this function can be defined as-
is a given continuous differentiable vector function then the divergence of this function can be defined as-

Curl (Definition)-
Curl of a vector function can be defined as-

Note- Irrotational vector-
If  then the vector is said to be irrotational.
then the vector is said to be irrotational.
Vector identities:
Identity-1: grad uv = u grad v + v grad u
Proof:
So that
grad uv = u grad v + v grad u
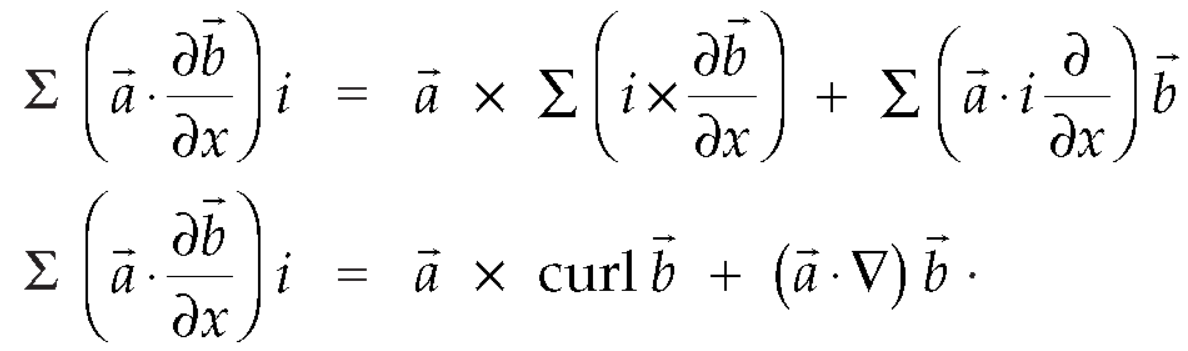
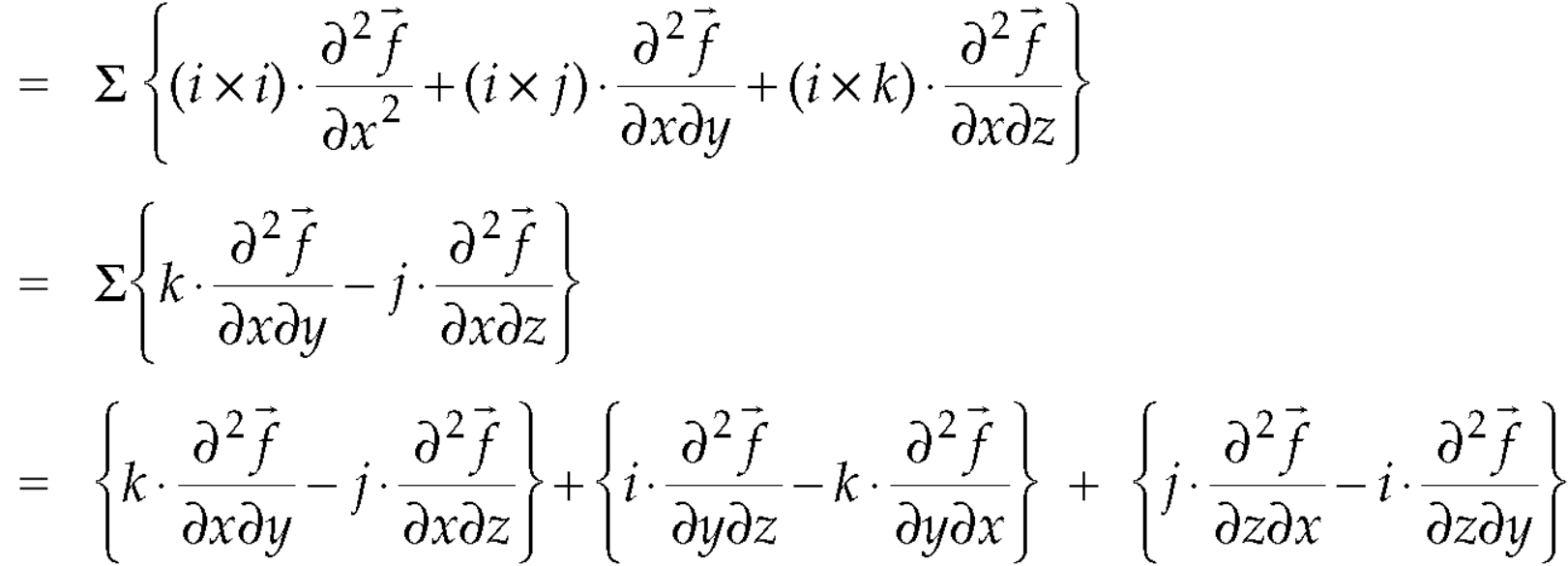
Identity-2: 
Proof:
Interchanging  , we get-
, we get-
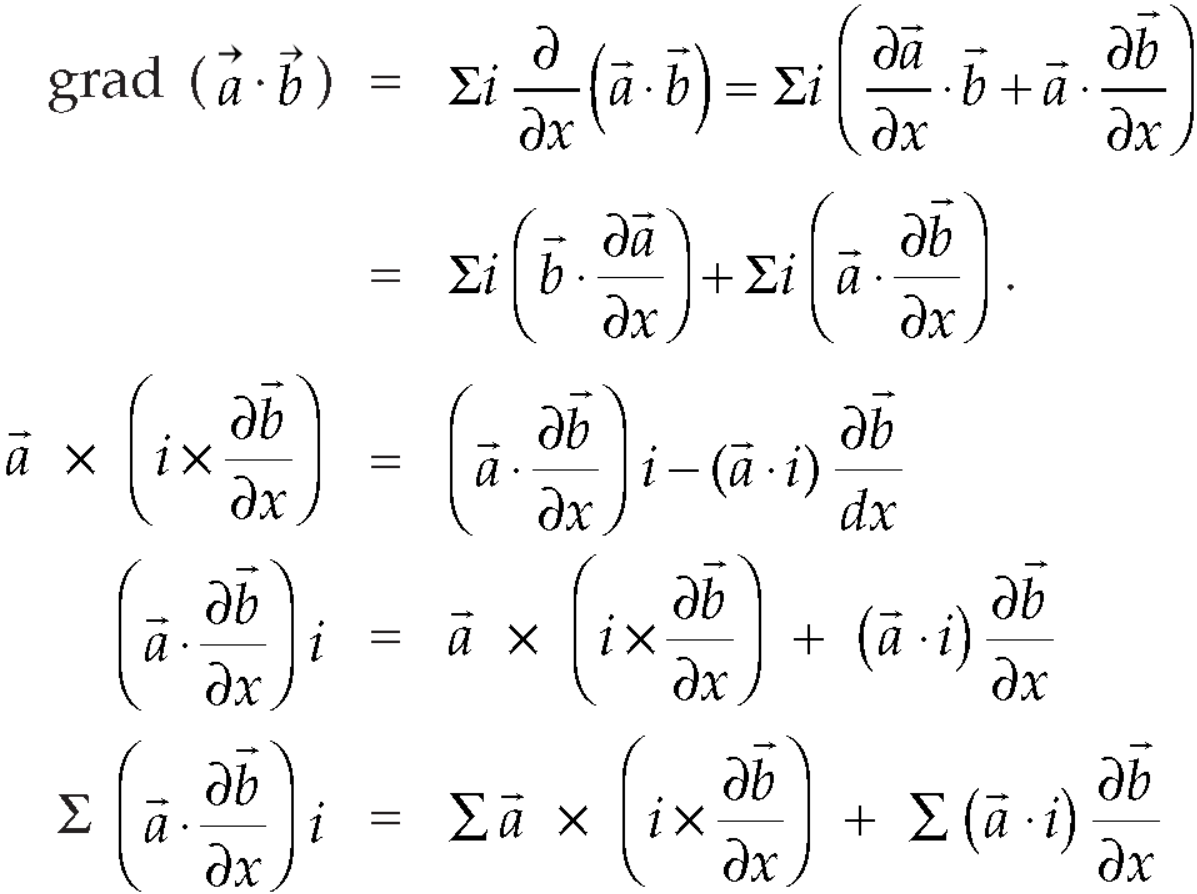
We get by using above equations-

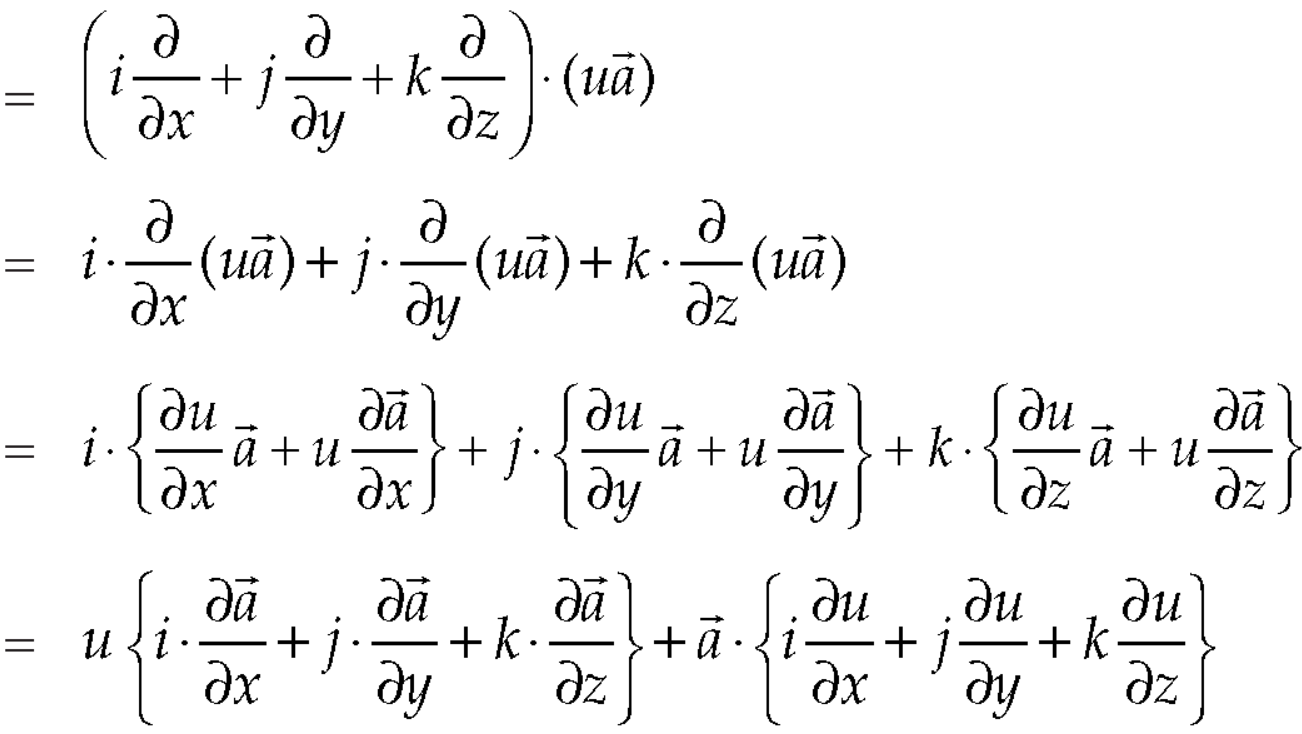
Identity-3 
Proof: 
So that-

Identity-4 
Proof:

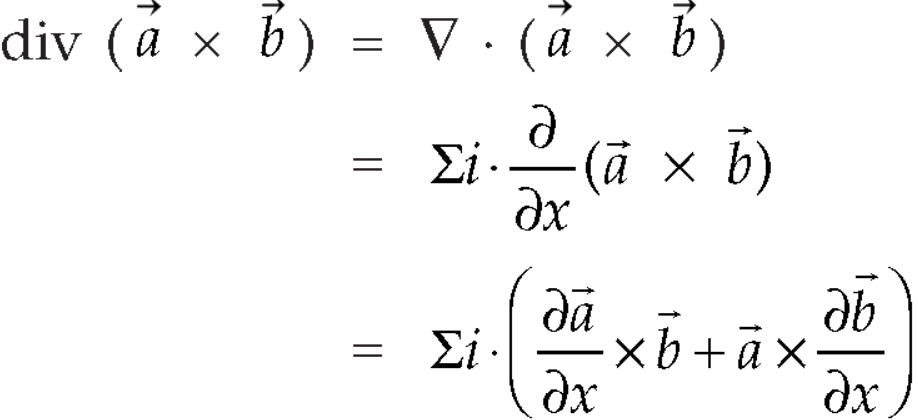
So that,

Identity-5 curl (u
Proof:
So that
curl (u
Identity-6: 
Proof:

So that-

Identity-7: 
Proof:
So that-
Example-1: Show that-
1. 
2.
Sol. We know that-



2. We know that-

 = 0
= 0
Example-2: If 
 then find the divergence and curl of
then find the divergence and curl of  .
.
Sol. we know that-


Now-
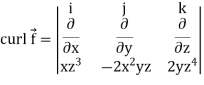
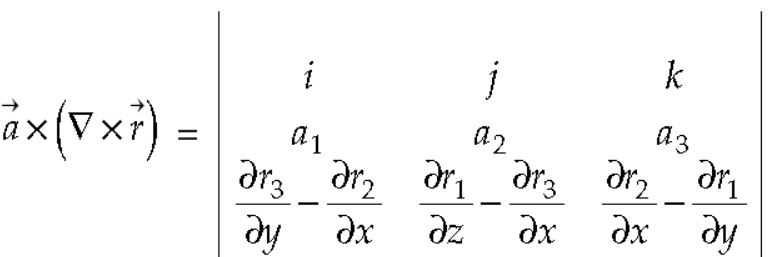
Example-3: Prove that 
Note- here  is a constant vector and
is a constant vector and 
Sol. here  and
and 
So that

Now-
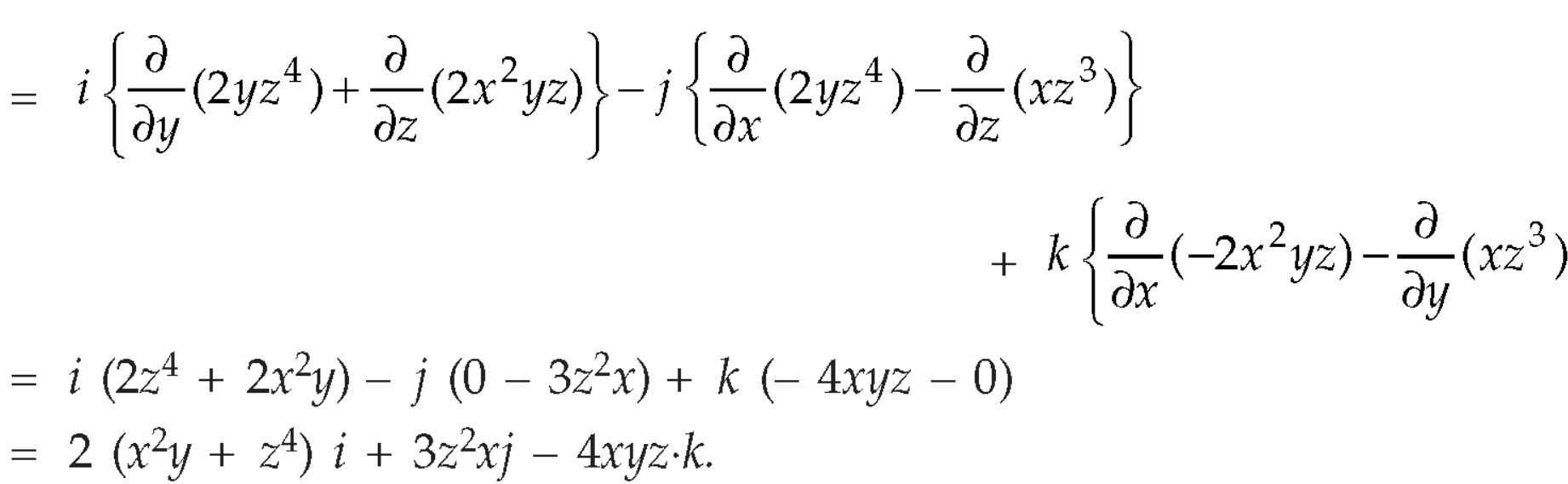

So that-

References:
1. G.B. Thomas and R.L. Finney, Calculus and Analytic Geometry, 9th Edition, Pearson, Reprint, 2002.
2. Erwin Kreyszig, Advanced Engineering Mathematics, 9th Edition, John Wiley & Sons, 2006.
3. Veerarajan T., Engineering Mathematics for First Year, Tata Mcgraw-Hill, New Delhi, 2008.
4. Ramana B.V., Higher Engineering Mathematics, Tata Mcgraw Hill New Delhi, 11th Reprint, 2010.
5. D. Poole, Linear Algebra: A Modern Introduction, 2nd Edition, Brooks/Cole, 2005.




