Unit-2
Z-transform
The most important use of z-transform is its ability to completely characterise signals and linear systems in the most general ways possible. The z-transform is primarily used to convert the discrete time domain signal into discrete frequency domain signal. The z-transform for LTI system is defined as H(z)= |
The range of variation of z for which z-transform converges is called region of convergence of z-transform. Properties of ROC of Z-Transforms
R1 <|z| < R2 Rmin < |z| <Rmax. Where R1, R2 are the magnitude of two poles of x(z)
Key takeaway
ROC does not contain any pole.
Example-1 Find the z-transform of the signal x(n) = sin w0n u(n) and find ROC.
A1) X(z) =
X(z) =
=
= 1/2j
= 1/2j
1/2j[ 1/1-ejw0z-1 – 1/1-e-jw0z-1]
= sin w0 z-1/ 1-2cos(wo)z-1 + z-2 ROC |z| >1
|







Due to its convolution property, the z-transform is a powerful tool to analyse LTI systems. From convolution property Y(z)=H(z)X(z). Where: Y(z)= z-transform of system output H(z) = z-transform of impulse response X(z)= z-transform of system input A discrete time LTI system is causal if and only if the ROC of its system function is exterior of the circle including infinity. The ROC is the exterior of the outermost pole. H(z) is the ratio of polynomials in z, the order of numerator cannot be greater than the order of the denominator. The LTI system is stable if and only if the ROC of the system function H(z) includes the unit circle |Z|=1. If it is a causal system it will be stable if and only if all he poles of H(z) lie inside the unit circle.
Key takeaway
|
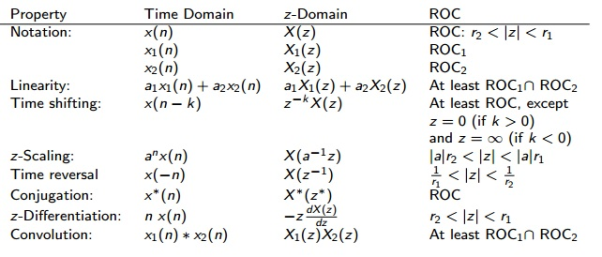
Linearity
If X1(z) = Z{x1(n)} and X2(z) = Z{x2(n)}
Then
Z{ax1(n) + bx2(n)} = a X1(z) + b X2(z)
Proof:
Z{ax1(n) + b x2(n) }=
= a
= a X1(z) + b X2(z)
Time Shifting
If X(z) = Z{x(n)} and initial conditions for x(n) are zero then
Z{x(n-m) } = z-m X(z)
Where m is a positive integer.
Proof:
Z {x(n-m)} =
Let n-m = p then n= p+m
Z{x(n-m)} =
z-m
Multiplication by exponential sequence
If X(z ) = Z{x(n)} then
Z [ an x(n) ] = X(a-1 z)
Proof:
Z{ an x(n) } =
=
= X(az-1)
Convolution
We know that
Z{x(n) * h(n) } = X(z) H(z)
Proof:
Let y(n) = x(n) * h(n)
y(n)=
Taking z-transform on both sides we obtain
Y(z) =
= X(k) Z(k)
Time Reversal
If X(z) = Z{x(n)} then
Z{x(-n)} = X(z-1}
Proof:
Z{x(-n)} =
= X(z-1)
Multiplication by n
If Z{x(n)} = X(z) then
Z{n x(n)} = -z d/dz X(z)
X(z) =
Z{n x(n)} =
= z
= z
= -z
= -z d/dz {
= -z d/dz X(z)
Key takeaway
Examples
1)Find the z-transform of the sequence
x(n) = a n-1 u(n-1)
We know that x(n) = an u(n) is
X(z) = 1/1/az-1
By using time shifting property we have Z{ x(n-k)} = z-k X(z)
Therefore
Z{an-1 u(n-1)} = z-1/ 1-az-1 = 1/z-a. ROC |z| > |a|
2)Find the z-transform of the sequence
x(n) = an cos nπ/2
Z{ cos w0n} = 1- (cos w0) z-1/ 1 –(2 cos w0) z-1 + z-2
Since w0=π/2
Z{ cos π/2 n u(n)} = 1/1 + z-2
Using exponential sequence property
Z{ an x(n) } = X(a-1 z)
Z{ an cos nπ/2} = 1/1+(a-1z)-2 = 1/ 1 + a2/z2 = z2/ a2 + z2
3)Find the z transform of the sequence x(n) = n u(n)
The z-transform of unit step sequence is given by
Z{u(n)} = z/z-1
Z{ n u(n)} = -z d/dz (z/z-1)
= z/(z-1)2
4)If x(n) = x1(n) * x2(n) where x1(n) = (1/3)n u(n) and x2(n) = (1/5)n u(n). Find X(z) by using convolution property.
X1(z) = 1/ 1- (1/3)z-1 X2(z) = 1/1- (1/5) z-1
X(z) = 1/1-(1/3)z-1 . 1/1-(1/5) z-1
Using z-transform find the convolution of two sequences.
x1(n) = {1,2,-1,0,3} x2(n) = { 1,2,-1}
Z{ x1(n) * x2(n)} = X1(z) . X2(z)
X1(z) = 1 + 2z-1 – z-2 + 3 z-4
X2(z) = 1 + 2z-1 – z-2
(1 + 2z-1 – z-2 + 3 z-4 ) (1 + 2z-1 – z-2 )
= 1 + 4z-1 + 2z-2 – 4 z- 3 + 4 z-4 + 6 z- 5 – 3 z-6
5)Determine the z-transform of the signal x(n ) = rn (sin w0n ) u(n)
Z{(sin w0n ) u(n)} = sin w0 z-1/ 1 -2 (cos w0) z-1 + z-2
Z{ an x(n)} = X(a-1 z)
Therefore
Z{ rn sin(w0n) u(n) } = (sin w0) (r-1 z)-1/ 1- 2 (cos w0)(r-1z)-1 + (r-1z)-2
= r(sinw0) z-1/ 1-2r(cos w0) z-1 + r2 z-2
6)Determine the signal x(n) whose z-transform is given by X(z) = log(1- az-1).
X(z)= log(1-az-1)
Differentiating both sides we get
d/dz X(z) = 1/1-az-1 (a z-2) = az-2/1- az-1
-z d/dz { X(z)} = -az-1/1-az-1
= -az-1[ 1/1-az-1]
= -a Z[ a n-1 u(n-1)] -------- (1)
From differentiation property
Z{ n x(n)} = -z d/dz [ X(z)] ------- (2)
Comparing (1) and (2) we get
n x(n) = -a [ a n-1 u(n-1)]
or x(n) = -a [a n-1 u(n-1)]/n
7)Determine the z-transform of the signal
x(n) =1/2 (n2 + n) (1/3) n-1 u(n-1)
=½ n2 (1/3) n-1 u(n-1) +1/2 n (1/3) n-1 u(n-1)
We know that
Z[(1/3) n u(n)] = z/ z-1/3
Using time-shifting property
Z{(1/3) n-1 u(n-1)] = 1/ z- 1/3
Z [ n (1/3) n-1 u(n-1)] = -z d/dz [1/z-(1/3)]
=-z d/dz( 1/z-1/3)= -z [-1/(z-1/3) 2]= z/ (z-1/3)2
Z [ n2 (1/3) u(n-1)] = -z d/dz [ z/(z-1/3)2]
= z(z+1/3)/(z-1/3)2
= -z [ (z-1/3)2 -2z(z-1/3)/(z-1/3)4
= z(z+1/3)/(z-1/3)3
X(z) = ½[z(z+1/3)/(z-1/3)3 + z/ (z-1/3)2]
= z2/(z-1/3)3
|














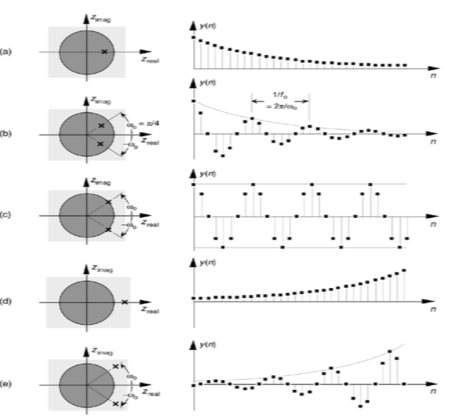
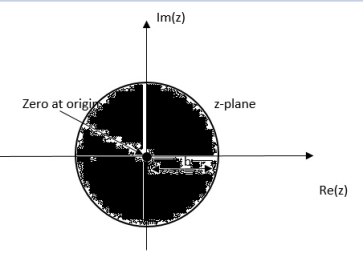
One of the most important characteristics of the z-plane is that the region of filter stability is mapped to the inside of the unit circle on the z-plane. Given the H(z) transfer function of a digital filter, we can examine that function's pole locations to determine filter stability. If all poles are located inside the unit circle, the filter will be stable. On the other hand, if any pole is located outside the unit circle, the filter will be unstable.
Fig1 Various H(z) pole locations and their discrete time domain impulse responses
Figure above shows the z-plane pole locations of several example z-domain transfer functions and their corresponding discrete time-domain impulse responses. The y(n) outputs in Figures (d) and (e) show examples of how unstable filter outputs increase in amplitude, as time passes, whenever their x(n) inputs are nonzero. To avoid this situation, any IIR digital filter that we design should have an H(z) transfer function with all of its individual poles inside the unit circle.
Key takeaway
The location pole can determine the systems stability.
Examples
Find the z-transform for the sequence
x[n] = 2
Solution:
X(z) = 2 + 3 z-1 + 5 z -2 + 2 z -3
If X(z)= 4 – 5 z-2 + z-3 – 2z -4 then find x[n]
Solution:
x[n] = 4
Find the z-transform and ROC of the signal
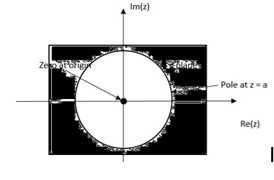
x(n) = an u(n)
Solution:
X(z) =
= 1 for n≥0
=
=
This is a geometric series of infinite length that is
a + ar + ar2 + ………….. ∞ = a /1-r if |r| <1
Then from equation (3) it converges when |az-1| < 1 or |z| >|a|
Therefore
X(z) = 1/ 1-az-1: ROC |z| > |a|
Fig 2 ROC |z|>|a|
Find the z-transform of the signal x(n) =-b n u(-n-1). Find ROC
X(z) =
X(z) = = 1 for n ≤ -1 =
= b-1z/1- b-1z = z/ z-b = 1/ 1-bz-1 |z| < |b|
Fig 3 ROC |z|<|b|
Find the z-transform of x(n) = an u(n) – bn u(-n-1)
X(z) =
=
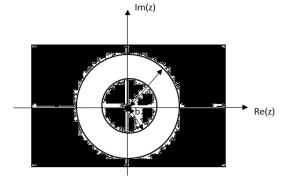
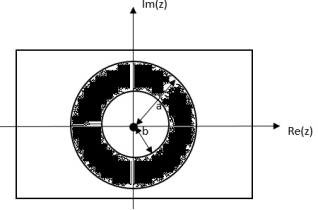
= z/z-a + z/z-b ROC |a| < |z| < |b|
Fig 4 ROC |a| < |z| < |b|
|b|< |a|
Fig 5 ROC |b|< |a|
|b| >|a|
Find the z-transform of x(n) = {1,2,3,2}
Given x(0) = 1 x(1) =2 x(2) =3 x(3) = 2
X(z) =
X(z) = 1+ 2z-1 + 3 z-2 +2 z-3
|














Formal inverse z-transform is based on a Cauchy integral • Less formal ways sufficient most of the time – Inspection method – Partial fraction expansion – Power series expansion • Inspection Method – Make use of known z-transform pairs such as
anu[n] 1/ (1-az-1) |z| > |a|
Power series method The z-transform of the sequence x(n) is given by gives the expansion in power series form. From power series we get the following sequence: x(n) = {∙∙∙∙∙∙∙∙∙∙x(−2), x(−1), x(0), x(1), x(2), ∙∙∙∙∙∙∙∙∙∙∙} It is possible to get the power series expansion directly or by long division. In power series expansion technique ROC has a vital role.
Partial fraction expansion method Find the partial fraction method of
X(z) = ¼ z-1 (1 – ½ z-1)(1-1/4 z-1)
X(z) = A + B Z (1-1/2z-1) (1 – ¼ z-1)
By solving A= 1 and B=-1
Therefore,
X(z) = z - z z-1/2 z-1/4
x(n) = (1/2) n u(n) – (1/4) n u(n)
Find the partial fraction of
X(z) = 1 1+ z-1 + z-2
X(z) = z z2 + z + 1 = z (z + 0.5 +j 0.866)(z+0.5 – j0.866)
X(z) = c + c* z z-(-0.5 +j0.866) z – (- 0. 5 – j 0.866)
X(z) = 0.5+j0.288 + 0.5 – j 0.288 z z-(-0.5 +j0.866) z – (- 0. 5 – j 0.866)
X(z) = 0.5+j0.288 z + 0.5 – j 0.288 z z-(-0.5 +j0.866) z – (- 0. 5 – j 0.866)
By taking inverse z-transform both sides we get
= (0.5+j0.288)( (-0.5 +j0.866) n u(n) +(0.5+j0.288)( (-0.5 -j0.866) n u(n)
Solution of difference equations using Z transform
Z transform converts the difference into algebraic equation in z-domain.
Find the impulse response and step response for the following systems:
y(n) = - ¾ y(n-1) + 1/8 y(n-2) = x(n)
y(n) - ¾ y(n-1) + 1/8 y(n-2) = x(n)
Taking z-transform on both sides we get
Y(z) – ¾ [ z-1 Y(z) + y(-1) ] +1/8 [ z-2 Y(z) + z-1 y(-1)+y(-2)] = X(z)
Substituting y(-1)=y(-2)= 0
Y(z) -3/4 z-1 Y(z) + 1/8 z-2 Y(z) = X(z)
Y(z) = 1____________ 1-¾ z-1 + 1/8 z-2
Impulse response
x(n) =
Y(z) = 1____________ = 1____________ 1-¾ z-1 + 1/8 z-2 1- ¾ z-1 + 1/8 z-2
Y(z) = z__________ = A___ + B__ X(z) (z-1/2)(z-1/4) (z-1/2) (z-1/4)
By solving A=2 and B=-1.
Y(z) = 2 z - z z-1/2 (z-1/4)
y(n) = 2 (1/2)n u(n) – (1/4) n u(n).
Step Response
x(n) = u(n) X(z) = z/z-1
Y(z) = 1_______ X(z) 1-3/4 z-1 + 1/8 z-2
Y(z) = z + z2___________ z-1 z2 -3/4 z +1/8
Y(z) = z2___________ z z2 -3/4 z +1/8
Y(z) = z2___________ z (z-1)(z-1/2)(z-3/4)
= A + B + C z-1 z-1/2 z- 1/4
By solving A=8/3 B= -2 C= 1/3
Therefore
Y(z) = 8 . z -2 z + 1/3 z 3 z-1 z-1/2 z-1/4
y(n) = 8/3 u(n) – 2(1/2)n u(n) +1/3 (1/4) n u(n)
Key takeaway The methods used for finding inverse z-transform are partial fraction method and power series method.
|


References:
1. S. K. Mitra, “Digital Signal Processing: A computer based approach”, McGraw Hill, 2011.
2. A.V. Oppenheim and R. W. Schafer, “Discrete Time Signal Processing”, Prentice Hall, 1989.
3. J. G. Proakis and D.G. Manolakis, “Digital Signal Processing: Principles, Algorithms And Applications”, Prentice Hall, 1997.
4. L. R. Rabiner and B. Gold, “Theory and Application of Digital Signal Processing”, Prentice Hall, 1992.
5. J. R. Johnson, “Introduction to Digital Signal Processing”, Prentice Hall, 1992.
6. D. J. DeFatta, J. G. Lucas andW. S. Hodgkiss, “Digital Signal Processing”, John Wiley & Sons,1988.




