UNIT 3
Discrete time systems
- Z transform for Discrete System
Definition:
The Z transform for discrete time system x(n ) is defined as
X(z) =  ------- (1) where z is a complex variable.
------- (1) where z is a complex variable.
In polar form z can be expressed as
z = r e jw ---------------(2) where r is the radius of a circle.
For n≥ 0
X(z ) =  --------- (3)which is called one-sided z-transform.
--------- (3)which is called one-sided z-transform.
By substituting z = r e jw
X(r e jw) =  (r e jw) –n ------- (4)
(r e jw) –n ------- (4)
 e- jwn ----- (5)
e- jwn ----- (5)
Equation(5) represents the Fourier transform of the signal x(n) r-n
Hence the inverse DTFT X(r ejw) must be x(n) r-n.
x(n) r-n = 1/2π  r e jw ) e jwn dw
r e jw ) e jwn dw
On multiplying both sides by rn we get
x(n) = 1/ 2 π  r ejw) (r ejw ) n dw [ z = r ejw
r ejw) (r ejw ) n dw [ z = r ejw
Let z= r e jw and dw= dz/jz
Dz = r ejw dw
Dw = dz/jre jw
Example
Find the z-transform for the sequence
x[n] = 2  + 3
+ 3  + 5
+ 5  + 2
+ 2 
Solution:
X(z) = 2 + 3 z-1 + 5 z -2 + 2 z -3
Example
If X(z)= 4 – 5 z-2 + z-3 – 2z -4 then find x[n]
Solution:
x[n] = 4  - 5
- 5  +
+  - 2
- 2 
Example : Find the z-transform and ROC of the signal
x(n) = an u(n)
Solution:
X(z) = 
=  an u(n) -----(1) u(n) = 0 for n<0
an u(n) -----(1) u(n) = 0 for n<0
1 for n≥0
=  an ------- (2)
an ------- (2)
=  n ------- (3)
n ------- (3)
This is a geometric series of infinite length that is
a + ar + ar2 + ………….. ∞ = a /1-r if |r| <1
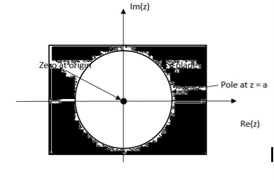
Then from equation (3) it converges when |az-1| < 1 or |z| >|a|
Therefore
X(z) = 1/ 1-az-1: ROC |z| > |a|
Find the z-transform of the signal x(n) =-b n u(-n-1). Find ROC
X(z) = 
X(z) =  bn u(-n-1) u(-n-1) =0 for n ≥0
bn u(-n-1) u(-n-1) =0 for n ≥0
= 1 for n ≤ -1
=  bn =
bn =  b-1 =
b-1 =
= b-1z/1- b-1z = z/ z-b = 1/ 1-bz-1 |z| < |b|
Find the z-transform of x(n) = an u(n) – bn u(-n-1)
X(z) = 
=  n +
n +  b-1
b-1
= z/z-a + z/z-b ROC |a| < |z| < |b|
|b|< |a|
|b| >|a|
Find the z-transform of x(n) = {1,2,3,2}
Given x(0) = 1 x(1) =2 x(2) =3 x(3) = 2
X(z) = 
X(z) = 1+ 2z-1 + 3 z-2 +2 z-3
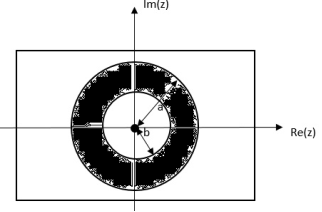
Properties of Convergence
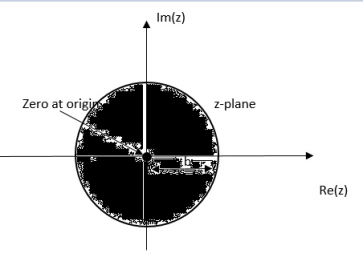
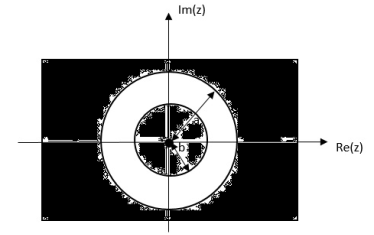
- The ROC is a ring or disk in the z-plane centered at the origin.
- ROC cannot contain any poles.
- If x(n) is finite duration casual sequence then the ROC is the entire z-plane except at z=0.
- If x(n) is finite duration anti-casual sequence then ROC is the entire z-plane except at z=∞
- If x(n) is a finite duration two-sided sequence ROC is the entire z-plane except at z=0 and z=∞
- If x(n) is a finite duration two-sided sequence then ROC will consist of a ring in the z-plane bounded on the interior and exterior by a pole not containing any poles.
- The ROC of an LTI system contains unit circle.
- ROC must be a connected region.
Find the z-transform of the signal x(n) = sin w0n u(n) and find ROC.
X(z) = 
X(z) = 
=  sin
sin  = ej
= ej - e-j
- e-j / 2j
/ 2j
= 1/2j  (ejw0n – e –jwon )z-n
(ejw0n – e –jwon )z-n
= 1/2j  ejwon z-1) n -
ejwon z-1) n -  e-jw0z-1) n
e-jw0z-1) n
1/2j[ 1/1-ejw0z-1 – 1/1-e-jw0z-1]
= sin w0 z-1/ 1-2cos(wo)z-1 + z-2 ROC |z| >1
2. LTI system
Properties of z-transform
- Linearity
If X1(z) = Z{x1(n)} and X2(z) = Z{x2(n)}
Then
Z{ax1(n) + bx2(n)} = a X1(z) + b X2(z)
Proof:
Z{ax1(n) + b x2(n) }=  z-n
z-n
= a  z-n + b
z-n + b  z-n
z-n
= a X1(z) + b X2(z)
- Time Shifting
If X(z) = Z{x(n)} and initial conditions for x(n) are zero then
Z{x(n-m) } = z-m X(z)
Where m is a positive integer.
Proof:
Z {x(n-m)} =  z-n
z-n
Let n-m = p then n= p+m
Z{x(n-m)} =  z –(m+p)
z –(m+p)
z-m  z-p = z-m X(z)
z-p = z-m X(z)
- Multiplication by exponential sequence
If X(z ) = Z{x(n)} then
Z [ an x(n) ] = X(a-1 z)
Proof:
Z{ an x(n) } =  an z-n
an z-n
=  (az-1)n
(az-1)n
= X(az-1)
- Convolution
We know that
Z{x(n) * h(n) } = X(z) H(z)
Proof:
Let y(n) = x(n) * h(n)
y(n)= 
Taking z-transform on both sides we obtain
Y(z) =
 z-n
z-n
 z-k
z-k  z –(n-k) Replacing n-k by l
z –(n-k) Replacing n-k by l
 z-k
z-k  z-l
z-l
= X(k) Z(k)
- Time Reversal
If X(z) = Z{x(n)} then
Z{x(-n)} = X(z-1}
Proof:
Z{x(-n)} =  ( z-l) -1 l=-n
( z-l) -1 l=-n
= X(z-1)
- Multiplication by n
If Z{x(n)} = X(z) then
Z{n x(n)} = -z d/dz X(z)
X(z) = 
Z{n x(n)} = 
= z  -1
-1
= z 
= -z  }
}
= -z d/dz { 
= -z d/dz X(z)
Problems:
Find the z-transform of the sequence
x(n) = a n-1 u(n-1)
We know that x(n) = an u(n) is
X(z) = 1/1/az-1
By using time shifting property we have Z{ x(n-k)} = z-k X(z)
Therefore
Z{an-1 u(n-1)} = z-1/ 1-az-1 = 1/z-a. ROC |z| > |a|
- Find the z-transform of the sequence
x(n) = an cos nπ/2
Z{ cos w0n} = 1- (cos w0) z-1/ 1 –(2 cos w0) z-1 + z-2
Since w0=π/2
Z{ cos π/2 n u(n)} = 1/1 + z-2
Using exponential sequence property
Z{ an x(n) } = X(a-1 z)
Z{ an cos nπ/2} = 1/1+(a-1z)-2 = 1/ 1 + a2/z2 = z2/ a2 + z2
- Find the z transform of the sequence x(n) = n u(n)
The z-transform of unit step sequence is given by
Z{u(n)} = z/z-1
Z{ n u(n)} = -z d/dz (z/z-1)
= z/(z-1)2
- If x(n) = x1(n) * x2(n) where x1(n) = (1/3)n u(n) and x2(n) = (1/5)n u(n). Find X(z) by using convolution property.
X1(z) = 1/ 1- (1/3)z-1 X2(z) = 1/1- (1/5) z-1
X(z) = 1/1-(1/3)z-1 . 1/1-(1/5) z-1
Using z-transform find the convolution of two sequences.
x1(n) = {1,2,-1,0,3} x2(n) = { 1,2,-1}
Z{ x1(n) * x2(n)} = X1(z) . X2(z)
X1(z) = 1 + 2z-1 – z-2 + 3 z-4
X2(z) = 1 + 2z-1 – z-2
(1 + 2z-1 – z-2 + 3 z-4 ) (1 + 2z-1 – z-2 )
= 1 + 4z-1 + 2z-2 – 4 z- 3 + 4 z-4 + 6 z- 5 – 3 z-6
- Determine the z-transform of the signal
x(n ) = rn (sin w0n ) u(n)
Z{(sin w0n ) u(n)} = sin w0 z-1/ 1 -2 (cos w0) z-1 + z-2
Z{ an x(n)} = X(a-1 z)
Therefore
Z{ rn sin(w0n) u(n) } = (sin w0) (r-1 z)-1/ 1- 2 (cos w0)(r-1z)-1 + (r-1z)-2
= r(sinw0) z-1/ 1-2r(cos w0) z-1 + r2 z-2
- Determine the signal x(n) whose z-transform is given by
X(z) = log(1- az-1)
X(z)= log(1-az-1)
Differentiating both sides we get
d/dz X(z) = 1/1-az-1 (a z-2) = az-2/1- az-1
-z d/dz { X(z)} = -az-1/1-az-1
= -az-1[ 1/1-az-1]
= -a Z[ a n-1 u(n-1)] -------- (1)
From differentiation property
Z{ n x(n)} = -z d/dz [ X(z)] ------- (2)
Comparing (1) and (2) we get
n x(n) = -a [ a n-1 u(n-1)]
Or x(n) = -a [a n-1 u(n-1)]/n
- Determine the z-transform of the signal
x(n) =1/2 (n2 + n) (1/3) n-1 u(n-1)
=½ n2 (1/3) n-1 u(n-1) +1/2 n (1/3) n-1 u(n-1)
We know that
Z[(1/3) n u(n)] = z/ z-1/3
Using time-shifting property
Z{(1/3) n-1 u(n-1)] = 1/ z- 1/3
Z [ n (1/3) n-1 u(n-1)] = -z d/dz [1/z-(1/3)]
=-z d/dz( 1/z-1/3)= -z [-1/(z-1/3) 2]= z/ (z-1/3)2
Z [ n2 (1/3) u(n-1)] = -z d/dz [ z/(z-1/3)2]
= z(z+1/3)/(z-1/3)2
= -z [ (z-1/3)2 -2z(z-1/3)/(z-1/3)4
= z(z+1/3)/(z-1/3)3
X(z) = ½[z(z+1/3)/(z-1/3)3 + z/ (z-1/3)2]
= z2/(z-1/3)3
- Inverse Z-transform
There are three methods that are often used to find inverse z-transform.
- Long Division Method
- Partial fraction method
- Convolution Method
- Long Division Method
If X(z) is the ratio of two polynomials then
X(z) = N(z)/D(z ) = b0 + b1 z-1 + b2 z-2 +……….. +bM z-M
1+ a1z-1 + a2 z-2 + …………. + aN z-N
Using long division method Find the inverse z-transform of the sequence of
X(z) = z+1
z2 +3z + 2
z-1 + 4z-2 + 10 z-3 +22 z-4


z2 -3z +2 z+1
z- 3 + 2z-1
4 – 2z-1
4 – 12 z-1 + 8 z-2
10z-1 – 8z-2
10 z-1 – 30z-2 +20 z-3
22 z-2 – 20 z-3
22 z-2 -66 z-3 +44 z-4
46 z-3 – 44 z-4
X(z) = z-1 + 4 z-2 + 10 z-3 + 22z-4
x(n) = { 0,1,4,10,22………}
- Partial fraction Method
Find the partial fraction method of
X(z) = ¼ z-1
(1 – ½ z-1)(1-1/4 z-1)
X(z) = A + B
Z (1-1/2z-1) (1 – ¼ z-1)
By solving A= 1 and B=-1
Therefore,
X(z) = z - z
z-1/2 z-1/4
x(n) = (1/2) n u(n) – (1/4) n u(n)
Find the partial fraction of
X(z) = 1
1+ z-1 + z-2
X(z) = z
z2 + z + 1
= z
(z + 0.5 +j 0.866)(z+0.5 – j0.866)
X(z) = c + c*
z z-(-0.5 +j0.866) z – (- 0. 5 – j 0.866)
X(z) = 0.5+j0.288 + 0.5 – j 0.288
z z-(-0.5 +j0.866) z – (- 0. 5 – j 0.866)
X(z) = 0.5+j0.288 z + 0.5 – j 0.288 z
z-(-0.5 +j0.866) z – (- 0. 5 – j 0.866)
By taking inverse z-transform both sides we get
= (0.5+j0.288)( (-0.5 +j0.866) n u(n) +(0.5+j0.288)( (-0.5 -j0.866) n u(n
- Convolution Method
Using convolution method find
X(z) = 1 + 3z-1
1 + 3z-1 + 2z-2
= z(z+3)
(z+1)(z+2)
X1(z) = z X2(z) = z+3 = z + z-1 3z
z+1 z+2 z+2 z+2
x1(n) = (-1) n u(n)
x2(n) = (-2) n u(n) + 3 (-2) n-1 u(n-1)
x(n) = x1(n) * x2(n)
= (-1) n u(n) * [ (-2) n u(n) + 3 (-2) n-1 u(n-1)]
= (-1) n u(n) * (-2) n u(n) + 3 (-1) n u(n) * (-2) n-1 u(n-1)
=  k u(k) (-2) n-k u(n-k) + 3
k u(k) (-2) n-k u(n-k) + 3  k u(k) (-2) n-k-1 u(n-k-1)
k u(k) (-2) n-k-1 u(n-k-1)
= (-2)n  k (-2) –k + 3(-2) n-1
k (-2) –k + 3(-2) n-1  k (-2) –k
k (-2) –k
= (-2) n  k + 3 (-2) n-1
k + 3 (-2) n-1  k
k
= (-2) n [ 1-(0.5) n+1 ] + 3 (-2) n-1 [ 1- (0.5) n]
1 – 0.5 1 – 0.5
x(n) = [ 2(-1)n – (-2)n] u(n)
3. Solution to Difference Equation using z-transform
Z transform converts the difference into algebraic equation in z-domain.
Find the impulse response and step response for the following systems:
y(n) = - ¾ y(n-1) + 1/8 y(n-2) = x(n)
y(n) - ¾ y(n-1) + 1/8 y(n-2) = x(n)
Taking z-transform on both sides we get
Y(z) – ¾ [ z-1 Y(z) + y(-1) ] +1/8 [ z-2 Y(z) + z-1 y(-1)+y(-2)] = X(z)
Substituting y(-1)=y(-2)= 0
Y(z) -3/4 z-1 Y(z) + 1/8 z-2 Y(z) = X(z)
Y(z) = 1____________
1- ¾ z-1 + 1/8 z-2
Impulse response
x(n) =  X(z) =1
X(z) =1
Y(z) = 1____________ = 1____________
1- ¾ z-1 + 1/8 z-2 1- ¾ z-1 + 1/8 z-2
Y(z) = z__________ = A___ + B__
X(z) (z-1/2)(z-1/4) (z-1/2) (z-1/4)
By solving A=2 and B=-1.
Y(z) = 2 z - z
z-1/2 (z-1/4)
y(n) = 2 (1/2)n u(n) – (1/4) n u(n).
Step Response
x(n) = u(n) X(z) = z/z-1
Y(z) = 1_______
X(z) 1-3/4 z-1 + 1/8 z-2
Y(z) = z z2___________
z-1 z2 -3/4 z +1/8
Y(z) = z2___________
z z2 -3/4 z +1/8
Y(z) = z2___________
z (z-1)(z-1/2)(z-3/4)
= A + B + C
z-1 z-1/2 z- 1/4
By solving A=8/3 B= -2 C= 1/3
Therefore
Y(z) = 8 . z -2 z + 1/3 z
3 z-1 z-1/2 z-1/4
y(n) = 8/3 u(n) – 2(1/2)n u(n) +1/3 (1/4) n u(n)




