Unit-3
Traffic Engineering
3.1.1 Road User Characteristics
a) Physical Characteristics: vision, hearing, strength, fatigue, illness can reduce alertness and general reaction to traffic situations can affect quality of judgment and increase the reaction time
b) Mental Characteristics: knowledge, skill, intelligence, experience
c) Psychological Characteristics: attentiveness, fear, anger, superstition, impatience
d) Environmental Factors: traffic stream characteristics, atmospheric & weather conditions, locality
3.1.2 Vehicular Characteristics
a) Static Characteristics: Dimension, weight, maximum turning angle.
Height of driver’s seat: Affects the visibility distance
Maximum width = 2.5m
Maximum height: Affects the clearance of overhead structures
a) Single decked vehicles = 3.8m
b) Double decked vehicles = 4.75m
Maximum length: Affects capacity, overtaking distance and maneuverability
a) Singe unit truck with two or more axles = 11m
b) Singe unit bus with two or more axles = 12m
c) Semi-trailer tractor combinations = 16m
d) Tractor and trailer combinations = 18m
Weight of loaded vehicles affects the design of pavement thickness and its gradient.
This governs the permissible and limiting gradients on road.
This depends upon the length of wheel base and features of the steering system.
This affects the design of sharp curves so as to negotiate vehicles at slow speeds.
b) Dynamic Characteristics: Speed, acceleration
Speed & acceleration of the vehicle depend on power of the engine and the resistances to be overcome.
The stability of the vehicle and its safe movement on horizontal curves are affected by the width of wheel base and the height of C.G. of the vehicle.
Braking Test is conducted to measure the skid resistance of pavement surface.
At least two of the three measurements are needed during braking test in order to determine the skid resistance of the pavement:
Related formulae:


f = skid resistance
u = initial speed in m/s
U = initial speed in kmph
ii. v – u = at where,
u = initial speed in m/s
v = final speed in m/s
a = acceleration in m/s2
t = time in sec
But, v = 0 since brakes are applied and vehicle is brought to a halt. Also, u > v since initial speed of the vehicle is not zero.
Therefore, we can say that, u = at
iii. v2 – u2 = 2as where,
u = initial speed in m/s
v = final speed in m/s
a = acceleration in m/s2
s = distance in m
But, v = 0 since brakes are applied and vehicle is brought to a halt. Also, u > v since initial speed of the vehicle is not zero.
Therefore, we can say that, u2 = 2as
But, from previous relation, u = at
Therefore, a2t2 = 2as
Or,a = 2s/t2
iv. F = ma where,
F = Force in kg-m/s2
m = mass in kg
a = acceleration in m/s2
The above equation can be written as follows:
f.w =
Therefore, f = where,
where,
f = coefficient of friction
w = weight in kg
a = acceleration in m/s2
g = acceleration due to gravity in m/s2
Key Takeaways:





3.2.1 Flow
There are practically two ways of counting the number of vehicles on a road. One is flow or volume, which is defined as the number of vehicles that pass a point on a highway or a given lane or direction of a highway during a specific time interval. The measurement is carried out by counting the number of vehicles, nt, passing a particular point in one lane in a defined period t. Then the flow q expressed in vehicles/hour is given by
q = 
Flow is expressed in planning and design field taking a day as the measurement of time.
3.2.1.1 Types of volume measurements
Since there is considerable variation in the volume of traffic, several types of measurements of volume are commonly adopted which will average these variations into a single volume count to be used in many design purposes.
3.2.2 Speed Study
Speed is considered as a quality measurement of travel as the drivers and passengers will be concerned more about the speed of the journey than the design aspects of the traffic. It is defined as the rate of motion in distance per unit of time. Mathematically speed or velocity v is given by
V = 
3.2.2.1 Important Terminology
a) Space mean speed: It represents average speed of vehicles in a certain road length at any time.
Vs = 
Where,
Vs = space mean speed (km/h)
d = length of road (m)
n = number of individual vehicle operations
ti = observed travel time (sec) for ith vehicle to travel distance d
The average travel time of all vehicles is obtained from the reciprocal of space mean speed.
b) Time mean speed: represents the speed distribution of vehicles at a point on the roadway and it is the average of instantaneous speed of observed vehicles at the spot
Vt = 
Where,
Vt = time mean speed (km/h)
n = number of individual vehicle operations
Vi = observed instantaneous speed of ith vehicle (km/h)
4. Running speed: It is an average speed maintained by a vehicle over a particular stretch of road while the vehicle is in motion.
5. Overall speed or Travel speed: It is an effective speed with which a vehicle traverses a particular route between two terminals.
3.2.3 Speed Study
There are two types of speed studies carried out:
a) Spot Speed Study
b) Speed & Delay Study
Spot Speed Study
1 Uses:
2 Factors affecting spot speeds:
3 Instruments used for finding spot speeds:
4 Presentation of spot speed data:
a) Average speed of vehicles
b) Cumulative speed of vehicles
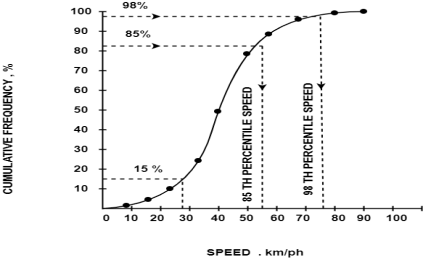
Fig.1: Cumulative speed of vehicles
c) Modal Average
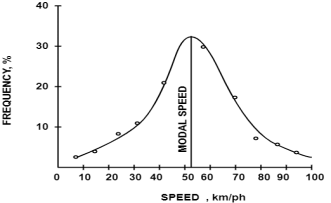
Fig.2: Modal Average
Speed & Delay Study
1. Uses
2. Types of delays
3. Methods for carrying out speed & delay study
q = 
Where,
q = flow of vehicles in one direction of the stream (volume per min)
na = average number of vehicles counted in the direction of the stream when the test vehicle travels in the opposite direction
ny = average number of vehicles overtaking the test vehicle when the test vehicle travels in the same direction
ta = average journey time when the test vehicle travels in the opposite direction as the stream (mins)
tw = average journey time when the test vehicle travels in the same direction as the stream (mins)
2. License Plate or Vehicle Number Method
3. Interview Technique
4. Elevated Photography & Observation Technique
Origin & Destination Study
1. Uses
2. Methods of O&D Study
2. License Plate Method
3. Return Post-card Method
4. Tag on car Method
5. Home Interview Method
6. Work Spot Interview Method
Key Takeaways:
3.3.1 Passenger Car Unit (PCU): It is the standard vehicle unit to convert other vehicle classes.
Type of vehicle | PCU |
Car, Taxi, Pick up | 1.0 |
Cycle, Motor cycle | 0.5 |
Bus, Truck | 3.0 (4.0 in some Cases) |
Horse Drawn Cart | 4.0 |
Bullock Cart | 6.0 |
Bullock Cart (Large) | 8.0 |
3.3.2 Determination of PCU
Traffic in many parts of the world is heterogeneous, where road space is shared among many traffic modes with different physical dimensions. Loose lane discipline prevails; car following is not the norm. This complicates computing of PCU. Some of the methods for determining passenger car units (PCU) are following:
It may be appropriate to use different values for the same vehicle type according to circumstances like volume of traffic, speed of vehicle, lane width and several external factors.
1 Method based on relative delay
The 1965 HCM used relative speed reduction to define PCUs for two lane highways and quantified this by the relative number of passing known as the Walker method. For multi-lane highways, PCUs were based on the relative delay due to trucks. PCUs for multi-lane highways based on relative delay may be found as
Et = 
Where Dij is the delay to passenger cars due to vehicle type i under condition j and Db is the base delay to standard passenger cars due to slower passenger cars.
PCUs in the 1965 HCM were reported for grades of specific length and percent, proportion of trucks, and LOS grouped as A through C or D and E. As expected, the highest PCU was reported for the longest and steepest grade with the highest proportion of trucks and the lowest LOS. However, in many cases the PCU for a given grade and LOS decreased with increasing proportion of trucks. PCUs in the 1965 HCM were reported for grades of specific length and percent, proportion of trucks, and LOS grouped as A through C or D and E. As expected, the highest PCU was reported for the longest and steepest grade with the highest proportion of trucks and the lowest LOS. However, in many cases the PCU for a given grade and LOS decreased with increasing proportion of trucks.
2 Multiple linear regression model
Multiple linear regression method try to represent the speed of a traffic stream as function of number of variables. For example, the percentile speed vp can represented as:
| (4) |

where vf is the free speed, V c is the number of passenger cars, V c is the number of trucks V r is the number of recreational vehicles, V r is the number of other types of vehicles, V a is the number of vehicles moving against the current stream, C1 to C5 are coefficient representing the relative sizes of speed reductions for each vehicle type. Although this model was formulated for two lane highways with opposing traffic flow, it could be applied to multi-lane highways by setting the coefficient C5 to zero. Using the speed reduction coefficients, En, the PCU for a vehicle type n is calculated as:
En = 
Where Cn is the speed reduction coefficient for vehicle type n and C1 is the speed reduction coefficient for passenger cars.
3 Method based on headway
Realizing one of the primary effects of heavy vehicles in the traffic stream is that they take up more space; headways have been used for some of the most popular methods to calculate PCUs. In 1976, Werner and Morrall suggested that the headway method is best suited to determine PCUs on level terrain at low levels of service.
3.3.3 Factors affecting PCU values
Key Takeaways:
Peak hour factors should be applied in most capacity analyses in accordance with the Highway Capacity Manual, which selected 15 minute flow rates as the basis for most of its procedures. The peak-hour factor (PHF) is descriptive of trip generation patterns and may apply to an area or portion of a street and highway system. The PHF is typically calculated from traffic counts. It is the average volume during the peak 60 minute period Vav60 divided by four times the average volume during the peak 15 minute’s period Vav15.
PHF = 
One can also use 5, 10, or 20 minutes instead of 15 minutes interval for the calculation of PHF. But in that case we have to change the multiplying factor in the denominator from 4. Generalizing,
PHF = 
Where, Vavn is the peak n minute flow. The Highway Capacity Manual advises that in absence of field measurements reasonable approximations for peak hour factor can be made as follows:
General guidelines for finding future PHF can be found in the Development Review Guidelines, which are as follows:
Key Takeaways:
3.5.1 Introduction
The problem of accident is a very acute in highway transportation due to complex flow pattern of vehicular traffic, presence of mixed traffic along with pedestrians. Traffic accident leads to loss of life and property. Thus the traffic engineers have to undertake a big responsibility of providing safe traffic movements to the road users and ensure their safety. Road accidents cannot be totally prevented but by suitable traffic engineering and management the accident rate can be reduced to a certain extent. For this reason systematic study of traffic accidents are required to be carried out. Proper investigation of the cause of accident will help to propose preventive measures in terms of design and control.
3.5.2 Objective of Accidental Study
Various objectives of accident studies may be listed as:
3.5.3 Causes
Four basic elements of traffic accident are:
3.5.4 Maintenance of Accident Records
3.5.5 Measures for reduction in accident rates
2. Enforcement
3. Education
Key Takeaways:
Traffic Island is physical structure or a painted object found on roads and roadside. Traffic island serves various purposes depending on it type. It is usually seen as a raised area along the road for a better & orderly flow of traffic or act as a stopping/ resting area for pedestrians. In few countries traffic islands are also referred to as channelizers as these “channelize” the traffic plying on the road. These may be raised structures made up of concrete or a physical structure in form of boards, barricades, traffic cones etc. The terminology differs as traffic islands are also known as painted islands, ghost islands, roundabouts, refuge islands, rotary etc.
3.6.1 Geometrical Features of Traffic Islands
Since traffic island is a common name given to various road structure and markings, these can be grouped based on the use, location, size, construction type and material etc.
To guide the flow of traffic into a proper channel through the intersection area.
Provided at bus stops etc for the protection of pedestrians.
To channelize the flow of heavy traffic at an intersection.
Key Takeaways:
There are various traffic signs available to cover a wide variety of traffic situations.
They can be classified into three main categories:
In addition to these, certain special type of traffic sign namely work zone signs are also available. These signs are used to give warning to the road users when some construction work is going on the road. They are placed only for short duration and will be removed soon after the work is over and when the road is brought back to its normal condition.
These include two unique signs: STOP sign and GIVE WAY sign.
The give way sign is octagonal in shape and red in colour with a white border.
The stop sign is triangular in shape with apex downwards and white in colour with a red border.
Speed signs may be used to limit the speed of different classes of vehicles on the road.
These are circular in shape with black numerals, white background and red border.
They are used to prohibit certain traffic movements, use of horns etc.
These include turn signs, alignment signs, exclusion signs, one way signs etc.
These are circular in shape with white background and red border.
They include parking signs which indicate parking prohibitions or restrictions.
They include both symbol and legend signs.
3.7.3 Informative signs
Direction & Place Identification signs
These include destination signs, direction signs, route markers and place identification signs.
The sign is rectangular in shape with white background, black border and black legends and symbols.
These include petrol pump, public telephone, hospital, first aid etc.
The sign is rectangular in shape with blue background, and black/ white legends and symbols.
These are set-up parallel to the road.
The sign is square in shape with blue background and a white colored letter ‘P’.
These are installed at all cause ways.
Key Takeaways:
3.8.1 Traffic Capacity (veh/hr/lane)
It is the ability of a roadway to accommodate traffic volume. It depends on the prevailing roadway and traffic conditions.
Traffic volume ≤ Traffic Capacity
Note: Traffic volume represents actual rate of flow and it responds to variation in traffic demand, whereas traffic capacity represents maximum rate of flow possible on the road for given level of service.
3.8.2 Types of traffic capacity
Factors affecting Practical Capacity
3.8.3 Determination of Theoretical Maximum Capacity
C = 
Where,
C = Basic capacity of single lane (veh/hr)
V = Speed (km/h)
S = Average centre to centre spacing of vehicles = Sg + L (m)
Sg = Minimum space gap = 0.278Vt (m)
L = Average length of vehicle (m)
t = Reaction Time (sec) – Assumed value is 0.7 sec
Furthermore, the space gap allowed by the driver of a following vehicle depends on several factors such as:
3.8.4 Traffic Density
Traffic density is a measure of the number of vehicles on the roads in an area.
The “Calculated” density was then computed from flow rate and travel speed using the following equation:
Kc = Qi Vm
Where, Qi is the hourly flow rate in vph at specific point of time (i) and the VM is the average travel speed in km/h at the same point of time.
3.8.5Traffic Control Devices
Traffic control device is the medium used for communicating between traffic engineer and road users. Unlike other modes of transportation, there is no control on the drivers using the road. Here traffic control devices come to the help of the traffic engineer. The major types of traffic control devices used are
1. Traffic signs
2. Road markings
3. Traffic signals
4. Parking control.
Requirements of traffic control devices
The control device should fulfill a need
It should command attention from the road users
It should convey a clear, simple meaning
Road users must respect the signs
The control device should provide adequate time for proper response from the road users
Types of traffic signs
1. Regulatory signs
2. Warning signs
3. Informative signs
Regulatory signs
These signs are also called mandatory signs because it is mandatory that the drivers must obey these signs. If the driver fails to obey them, the control agency has the right to take legal action against the driver.
Warning signs
Warning signs or cautionary signs give information to the driver about the impending road condition.
Informative signs
Informative signs also called guide signs are provided to assist the drivers to reach their desired destinations. These are predominantly meant for the drivers who are unfamiliar to the place. The guide signs are redundant for the users who are accustomed to the location.
Road Sign
The essential purpose of road markings is to guide and control traffic on a highway. They supplement the function of traffic signs. The markings serve as a psychological barrier and signify the delineation of traffic path and its lateral clearance from traffic hazards for the safe movement of traffic. Hence they are very important to ensure the safe, smooth and harmonious flow of traffic.
1 Classification of road markings
The road markings are defined as lines, patterns, words or other devices, except signs, set into applied or attached to the carriageway or kerbs or to objects within or adjacent to the carriageway, for controlling, warning, guiding and informing the users. The road markings are classified as
Longitudinal markings
Transverse markings
Object markings
Word messages
Marking for parking
Marking at hazardous locations
Parking
Parking is one of the major problems that is created by the increasing road traffic.
1 Parking studies
Before taking any measures for the betterment of conditions, data regarding availability of parking space, extent of its usage and parking demand is essential. It is also required to estimate the parking fares also.
2 Traffic Signal Design
The conflicts arising from movements of traffic in different directions is solved by time sharing of the principle. The advantages of traffic signal include an orderly movement of traffic, an increased capacity of the intersection and require only simple geometric design. However the disadvantages of the signalized intersection are it affects larger stopped delays, and the design requires complex considerations.
3 Definitions and notations
Cycle
Cycle length
Interval
Green interval
Red interval
Phase
Lost time
4 Phase design
The signal design procedure involves six major steps.
Phase design.
Determination of amber time and clearance time.
Determination of cycle length.
Apportioning of green time.
Pedestrian crossing requirements.
The performance evaluation.
Key Takeaways:
The following definitions, concepts and explanations are useful or important in and relevant to the design of traffic signals.
(i) Time Cycle:
The period of time required for the complete sequence of signal aspect at any one arm of an intersection from red to the onset of the next red is known as the ‘cycle time’. This varies from 35 seconds to 60 seconds for a simple right-angled intersection depending upon the width of road and traffic volume.
(ii) Phase:
The part of the signal cycle allocated any traffic movement or a combination of traffic movements.
(iii) Interval:
Any part of the signal cycle during which signal indications do not change.
(iv) Lost Time:
Time lost at the beginning and termination of green phases due to starting time and termination time. As soon as the signal turns green, the rate of discharge (or vehicle movement) starts to pick up and some time is lost before the flow reaches the maximum value. Similarly at the termination of the green phase, the flow tends to taper off, involving a further loss of time.
(v) Amber Period:
The transition interval between the termination of a related green signal and exhibition of a red signal is called the ‘clearance amber’ as this helps the traffic at the intersection to clear before green is flashed for traffic from the perpendicular or other oncoming directions.
(vi) Inter-Green Period:
This is the time from the end of the green period of the phase losing right of way to the beginning of the green period of the phase gaining right of way.
(vii) Timing Diagram:
This is a pictorial representation of the time cycles of the phases, on which the times of the signal indications – red, amber and green are marked in the correct sequence.
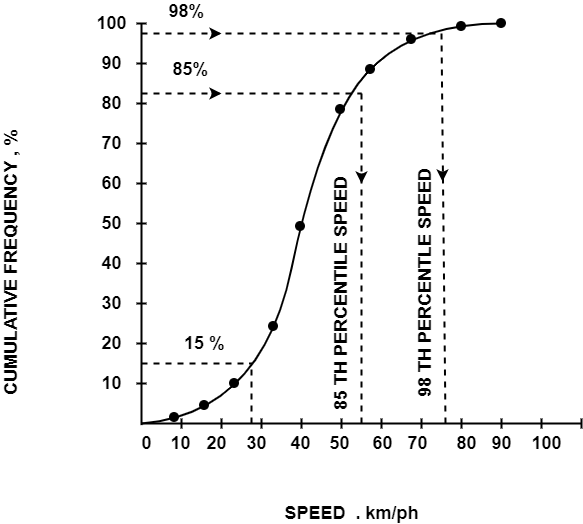
Fig.3: Timing Diagram
(viii) Phasing Diagram:
This diagram indicates the movements of traffic/pedestrians in the respective phases of the signal system. A typical phasing diagram for a simple rectangular intersection is shown in Fig. 4.46.
(ix) Queue Length:
This indicates the number of waiting vehicles accumulating near the intersection during a signal cycle. The more the queue length the less is the level of service.
(x) Level of Service:
This is a measure of a number of factors in traffic operation and is measured by the vehicle delay, the queue length and the probability of a vehicle entering the intersection during the first phase on its arrival.
(xi) Saturation Flow (S):
This indicates the number of vehicles passing an intersection with minimum headway during the whole of a ‘green’ period.
Where,
S = Saturation flow
w = Width of approach road in metros.
This works out to approximately 160 PCU for every 0.3 m width of the road and is applicable for w ranging from 5.50m to 18m. For smaller widths, reduced values of S are recommended.
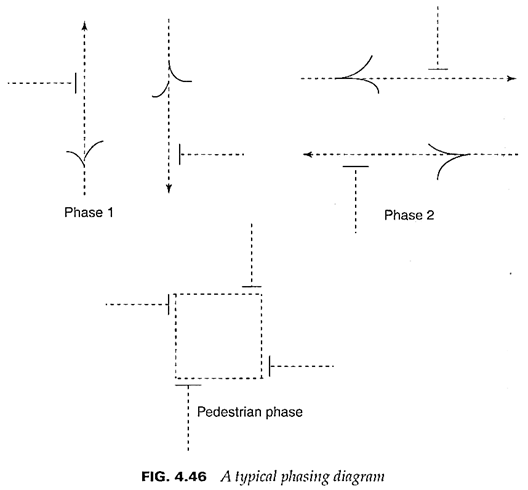
Fig.4: Phasing Diagram
Methods for the Design of Traffic Signals:
The following methods are commonly used for the design of traffic signals:
(a) Webster’s minimum delay method
(b) IRC method
3.9.1 Webster’s Minimum Delay Method:
In this method, the optimum signal cycle corresponding to the minimum total delay to the traffic at the signalized intersection is obtained after detailed studies of cycle time and delays the traffic volumes approaching the intersection. This is considered to be a rational approach as it has a mathematical basis.
The steps in the design procedure are:
(i) The saturation flow of traffic, S1, S2,… on the approach roads are obtained from field studies by noting the number of vehicles in the stream of flow during the green aspects and the corresponding time intervals.
In the absence of data, the values are determined using RRL recommendations already given under the definition for ‘saturation flow’.
(ii) The normal flows q1, q2, … on the approach roads, during the design peak hour traffic are also obtained from field observations
(iii) The ratios y1 = q1/S2, y2 = q2/S2, … are calculated.
In the case of mixed traffic, all the q- and S-values are to be obtained after converting to equivalent PCU values.
(iv) The optimum signal cycle, C0, is given by
Co = 
Here, L = Total Lost time per cycle in seconds = nl + R
n = number of phases
l = lost time for phase
R = All red time
If, Y = Y1 + Y2
Then, G1 =  (Co – L)
(Co – L)
G2 =  (Co – L)
(Co – L)
(v) Providing suitable amber times, the times of red, green and amber aspects are obtained.
(vi) If there are pedestrian signals, the ‘Walk’ and ‘Don’t Walk’ times can also be calculated based on the red aspect times on the particular roads and extra times for starting delays.
(viii) The results may be summarized in the form of a timing diagram or a phasing diagram.
3.9.2 IRC Method
This is basically the same as Webster’s approach, but with a few minor variations in accordance with the guidelines given by the IRC.
3.9.2.1 The following are the steps in the design
(i) The green times required for the major and minor roads are calculated under the assumption of an initial walking delay of 7 seconds and a walking speed of 1.2m/s to cover the width of the carriageway. These are the minimum green times required for vehicular traffic on the minor and major roads in that order.
(ii) The green time required for vehicular traffic on the major road is increased in proportion to the traffic on the two roads (major/minor).
(iii) The cycle time is calculated assuming an amber time of 2 seconds each.
(iv) The minimum green time required for clearing the vehicles approaching from each road is determined, assuming that the first vehicle needs 6 seconds and all the subsequent ones need 2 seconds each (this minimum should not be less than 16 seconds).
(v) The optimum signal cycle is calculated using Webster’s formula, using the appropriate values of saturation flow for the widths of the approach roads.
(vi) The lost time is calculated from the amber time, inter-green time and the initial delay time of 4 seconds for the first vehicle, on each leg.
(vii) The signal cycle time and the phases may be revised keeping in view the requirements from steps (iv) and (v) above.
(viii) Check by IRC method
IRC has assumed a time headway of 60 second for 1st vehicle and time headway of 2 second for remaining vehicle to calculate Green time.
GA = 1 X 6sec + (XA – 1) X 2 <16 second
GB = 1 X 6sec + (XB – 1) X 2 <16 second
For, Road A 1 hour = nAvph/lane
1 second = 
XA =  X C
X C
Similarly, XB =  X C
X C
Note: GA, GB (Approximate) > GA, GB (IRC)
(ix) Check and design by Webster’s Method.
Co = 
L = 4n + R
L = n (tsl + All red time)
R = All red time = Sum of amber time
Note: If saturation capacity is not given then, it can be approximately calculated as
S = 
Key Takeaway:
3.10.1 Intersection at grade
3.10.2 Types of Intersections at Grade
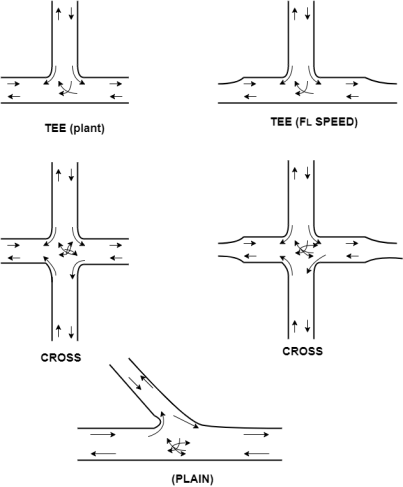
Fig.5: Un-channelized Intersections
The intersection area is paved and there is no restriction to vehicles to use any area of the intersection.
Plain intersection: no additional pavement width for turning movement is provided
Flared intersection: pavement area is widened at the intersection area by one or more traffic lanes
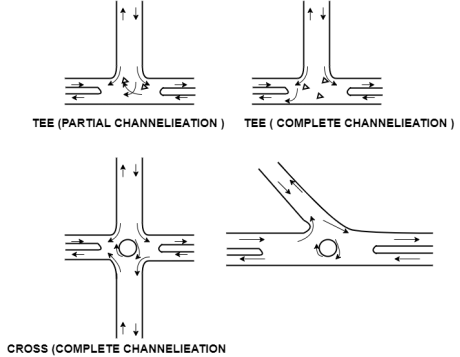
Fig.6: Channelized Intersections
The intersection area consists of small islands in the intersection area, thereby reducing the total area of conflict at the intersection.
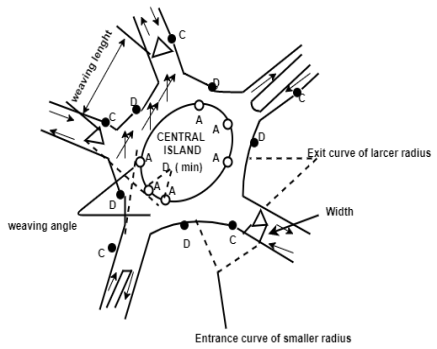
Fig.7: Rotary Intersections
These are special form of at-grade intersections laid out for the movement of traffic in one direction around a central traffic island.
The vehicles entering the rotary are gently forced to move in a clockwise direction in an orderly manner.
Advantages:
a) Traffic flow is regulated to only one direction of movement, thus eliminating severe conflicts between crossing movements.
b) All vehicles entering a rotary are gently forced to reduce the speed and continue to move at slower speed. Thus, none of the vehicles need to be stopped.
c) Accidents and their severities are much less in rotaries.
d) Self-governing and do not need any control by police or traffic signals.
e) Ideally suited for moderate traffic.
Disadvantages:
a) All vehicles are forced to slow down and negotiate the intersection. Therefore, the cumulative delay is higher.
b) Vehicles are forced to reduce their speed even in low-traffic conditions.
c) Rotaries require large area of flat land making them costly at urban areas.
d) Cannot support large pedestrian traffic.
3.10.3 Guidelines for Selection of Rotary
a) Suitable when traffic entering from all four approaches is relatively equal.
b) A total volume of about 3000 vehicles per hour can be considered as the upper limiting case and a volume of 500 vehicles per hour is the lower limit.
c) Suitable when there are four or more than four approaches.
d) Very beneficial when proportion of right turning traffic is 30% of the total traffic.
3.10.4 Design Elements
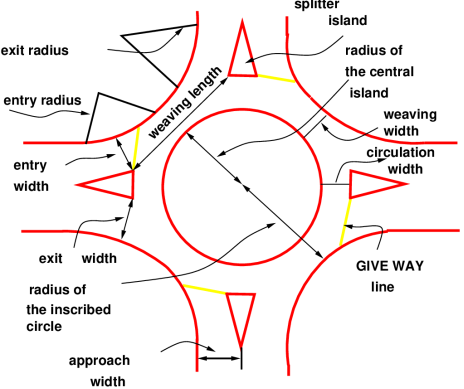
Fig.8: Rotary

Where, e1 = width of carriageway at entry
And e2 = width of carriageway at exit
Weaving length= 4 x weaving width
Weaving length is 45-90 m for rural and 30-60 m for urban areas.
w = width of weaving section (within a range of 6-18m)
e = average entry width (in metres) (e/w ratio must be between 0.4-1)
l = weaving length (w/l ratio must be between 0.12-4)
p = proportion of weaving traffic to non-weaving traffic (must be between 0.4-1) = 
Key Takeaways:
3.11.1Overview
Rotary intersections or round about are special form of at-grade intersections laid out for the movement of traffic in one direction around a central traffic island. Essentially all the major conflicts at an intersection namely the collision between through and right-turn movements are converted into milder conflicts namely merging and diverging. The vehicles entering the rotary are gently forced to move in a clockwise direction in orderly fashion. They then weave out of the rotary to the desired direction.
1 Advantages and disadvantages
The key advantages of a rotary intersection are listed below:
Although rotaries offer some distinct advantages, there are few specific limitations for rotaries which are listed below.
3.11.3 Guidelines for the selection
Because of the above limitation, rotaries are not suitable for every location. There are few guidelines that help in deciding the suitability of a rotary. They are listed below.
3.11.4 Traffic operations in a rotary
As noted earlier, the traffic operations at a rotary are three; diverging, merging and weaving. All the other conflicts are converted into these three less severe conflicts.
These movements are shown in figure 9. It can be observed that movements from each direction split into three; left, straight, and right turn.
Fig.9: Rotary Intersection
3.11.5 Design elements
The design elements include design speed, radius at entry, exit and the central island, weaving length and width, entry and exit widths. In addition the capacity of the rotary can also be determined by using some empirical formula. A typical rotary and the important design elements are shown in figure 10
Fig.10: Design elements of a rotary
3.11.5.1 Design speed
All the vehicles are required to reduce their speed at a rotary. Therefore, the design speed of a rotary will be much lower than the roads leading to it. Although it is possible to design roundabout without much speed reduction, the geometry may lead to very large size incurring huge cost of construction. The normal practice is to keep the design speed as 30 and 40 kmph for urban and rural areas respectively.
3.1.5.2 Entry, exit and island radius
The radius at the entry depends on various factors like design speed, super-elevation, and coefficient of friction. The entry to the rotary is not straight, but a small curvature is introduced. This will force the driver to reduce the speed. The entry radius of about 20 and 25 meters is ideal for an urban and rural design respectively.
The exit radius should be higher than the entry radius and the radius of the rotary island so that the vehicles will discharge from the rotary at a higher rate. A general practice is to keep the exit radius as 1.5 to 2 times the entry radius. However, if pedestrian movement is higher at the exit approach, then the exit radius could be set as same as that of the entry radius.
The radius of the central island is governed by the design speed, and the radius of the entry curve. The radius of the central island, in practice, is given a slightly higher radius so that the movement of the traffic already in the rotary will have priority. The radius of the central island which is about 1.3 times that of the entry curve is adequate for all practical purposes.
3.11.5.3 Width of the rotary
The entry width and exit width of the rotary is governed by the traffic entering and leaving the intersection and the width of the approaching road. The width of the carriageway at entry and exit will be lower than the width of the carriageway at the approaches to enable reduction of speed. IRC suggests that a two lane road of 7 m width should be kept as 7 m for urban roads and 6.5 m for rural roads. Further, a three lane road of 10.5 m is to be reduced to 7 m and 7.5 m respectively for urban and rural roads.
The width of the weaving section should be higher than the width at entry and exit. Normally this will be one lane more than the average entry and exit width. Thus weaving width is given as,
Wweaving=  + 3.5m -----------------------1
+ 3.5m -----------------------1
Where, e1 = width of carriageway at entry
e2 = width of carriageway at exit
Weaving length= 4 x weaving width
Weaving length is 45-90 m for rural and 30-60 m for urban areas.
Weaving length determines how smoothly the traffic can merge and diverge. It is decided based on many factors such as weaving width, proportion of weaving traffic to the non-weaving traffic etc. This can be best achieved by making the ratio of weaving length to the weaving width very high. A ratio of 4 is the minimum value suggested by IRC. Very large weaving length is also dangerous, as it may encourage over-speeding.
The capacity of rotary is determined by the capacity of each weaving section. Transportation road research lab (TRL) proposed the following empirical formula to find the capacity of the weaving section.
Capacity of Rotary: Qw =  ------------------------------2
------------------------------2
Where, w = width of weaving section (within a range of 6-18m)
e = average entry width (in metres) (e/w ratio must be between 0.4-1)
l = weaving length (w/l ratio must be between 0.12-4)
Where e is the average entry and exit width, i.e., w is the weaving width, l is the length of weaving, and p is the proportion of weaving traffic to the non-weaving traffic. Figure 3 shows four types of movements at a weaving section, a and d are the non-weaving traffic and b and c are the weaving traffic.
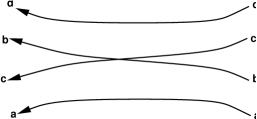
Fig.11: Weaving operation in a rotary
Therefore,
p =  ---------------------------------3
---------------------------------3
This capacity formula is valid only if the following conditions are satisfied.
Key Takeaways:
3.12.1 Overview
Capacity and Level of service are two related terms. Capacity analysis tries to give a clear understanding of how much traffic a given transportation facility can accommodate. Level of service tries to answer how good the present traffic situation on a given facility is. Thus it gives a qualitative measure of traffic, where as capacity analysis gives a quantitative measure of a facility. Capacity and level of service varies with the type of facility, prevailing traffic and road conditions etc. These concepts are discussed in this chapter.
3.12.2 Capacity
Capacity is defined as the maximum number of vehicles, passengers, or the like, per unit time, which can be accommodated under given conditions with a reasonable expectation of occurrence. Some of the observations that are found from this definition can be now discussed. Capacity is independent of the demand. It speaks about the physical amount of vehicles and passengers a road can afford. It does not depend on the total number of vehicles demanding service. On the other hand, it depends on traffic conditions, geometric design of the road etc. For example, a curved road has lesser capacity compared to a straight road. Capacity is expressed in terms of units of some specific thing (car, people, etc.), so it also does depend on the traffic composition. In addition, the capacity analysis depends on the environmental conditions too. Capacity is a probabilistic measure and it varies with respect to time and position. Hence it is not always possible to completely derive analytically the capacity. In most cases it is obtained, through field observations.
3.12.3 Level of service
A term closely related to capacity and often confused with it is service volume. When capacity gives a quantitative measure of traffic, level of service or LOS tries to give a qualitative measure. A service volume is the maximum number of vehicles, passengers, or the like, which can be accommodated by a given facility or system under given conditions at a given level of service. For a given road or facility, capacity could be constant. But actual flow will be different for different days and different times in a day itself. The intention of LOS is to relate the traffic service quality to a given flow rate of traffic. It is a term that designates a range of operating conditions on a particular type of facility. Highway capacity manual (HCM) developed by the transportation research board of USA provides some procedure to determine level of service. It divides the quality of traffic into six levels ranging form level A to level F. Level A represents the best quality of traffic where the driver has the freedom to drive with free flow speed and level F represents the worst quality of traffic. Level of service is defined based on the measure of effectiveness or (MOE). Typically three parameters are used under this and they are speed and travel time, density, and delay. One of the important measures of service quality is the amount of time spent in travel. Therefore, speed and travel time are considered to be more effective in defining LOS of a facility. Density gives the proximity of other vehicles in the stream. Since it affects the ability of drivers to maneuver in the traffic stream, it is also used to describe LOS. Delay is a term that describes excess or unexpected time spent in travel. Many specific delay measures are defined and used as MOE’s in the highway capacity manual.
3.12.4 Types of facilities
Most important classification of transportation facilities from the engineering perspective is based on the continuity of flow that is uninterrupted flow and interrupted flow. Uninterrupted flow is the flow of traffic in which there is no obstructions to the movement of vehicles along the road. Freeway is one example for this type of facility. In a freeway, when a vehicle enters a freeway, there is no need for the vehicle to stop anywhere till it leaves the freeway. There are three sections in a freeway - basic unit, weaving section and ramps (on/off). Vehicles will be entering the freeway through ramps. Ramps used for entering the freeway are called on-ramps and those used for exiting the freeway are called off-ramps. Freeways generally have 4, 6, or 8 lane alignments. Multi lanes also provide uninterrupted flow.
In many roads, there will be signalized as well as unsignalized intersections. Uninterrupted flow is possible in sections of rural and suburban multilane highways between signalized intersections where signal spacing is sufficient to allow for uninterrupted flow. Two lane highways also provide uninterrupted flow facilities.
Interrupted flow refers to the condition when the traffic flow on the road is obstructed due to some reasons. This is experienced in signalized intersections, unsignalized intersections, arterials etc. At signalized intersections, there will be some kind of active control and the vehicle will have to stop or sometimes to reduce its speed and the flow of traffic is interrupted. Thus the capacity is defined in terms of control delay ie sec/veh. Arterials are roads of long stretches with many intersections in between and obviously there will be interruption to the flow of traffic. Here, the capacity is expressed in terms of average travel speed. Some other facilities are facilities for pedestrians, bicycles, bus-transit, rail-transit etc. Example for pedestrian facility is a provision of subway exclusively for the use of pedestrians.
For uninterrupted flow of traffic, measure of effectiveness (MOE) is density in freeways. Speed also becomes important in two-lane highways and multilane highways. In the case of interrupted flow, MOE is delay. The delay of travel time becomes an important factor in calculating the capacity.
3.12.5 Highway capacity
Highway capacity is defined by the Highway Capacity Manual as the maximum hourly rate at which persons or vehicles can be reasonably expected to traverse a point or a uniform segment of a lane or roadway during a given time period under prevailing roadway, traffic and control conditions. The highway capacity depends on certain conditions as listed below;
1. Traffic conditions: It refers to the traffic composition in the road such as the mix of cars, trucks, buses etc in the stream. It also include peaking characteristics, proportions of turning movements at intersections and the like.
2. Road way characteristics: This points out to the geometric characteristics of the road. These include lane width, shoulder width, lane configuration, horizontal alignment and vertical alignment.
3. Control conditions: This primarily applies to surface facilities and often refers to the signals at intersections etc.
3.12.6 Factors affecting level of service
The level of service can be derived from a road under different operating characteristics and traffic volumes. The factors affecting level of service (LOS) can be listed as follows:
1. Speed and travel time
2. Traffic interruptions/restrictions
3. Freedom to travel with desired speed
4. Driver comfort and convenience
5. Operating cost.
Highway Capacity Manual (HCM) used travel speed and volume by capacity ratio (v/c ratio) to distinguish between various levels of service. The value of v/c ratio can vary between 0 and 1. Depending upon the travel speed and v/c ratio, HCM has defined six levels of service, level A to level F based on a graph between operating speed and v/c ratio as shown in the figure 35:1. Level of service A represents the zone of free flow. Here the traffic volume will be less; traffic will be experiencing free flow also. The drivers will be having the complete freedom to choose their desired speed. Even at maximum density, for this LOS the average spacing between vehicles is 167 m. Lane changes within the traffic stream, as well as merging and diverging movements, are made relatively easy. The effect of minor incidents and point breakdowns are easily aborted at this level. Level of service B represents zone of reasonably free flow. Free flow speeds are still maintained at this level of service. The drivers freedom to choose their desired speed is only slightly restricted. The lowest average spacing between vehicles is about 100 m.
At level of service C, the presence of other vehicles begins to restrict the maneuverability within the traffic stream. Average speeds remain at or near the free flow speed level, but significant increase in driver vigilance is required at this level. Minimum average spacing between the vehicles is in the range of 67 m. Queues may be expected to form behind any significant blockage. At level of service D, the average speeds begin to decline with increasing flows. Freedom to maneuver within the traffic stream is noticeably restricted. At this level, density deteriorates more quickly with flow. The spacing between the vehicles is about 50 m. As the traffic stream has little space to absorb disruptions, minor incidents can lead to queuing of vehicles. Level of service E defines operation at capacity. Maneuvering within the traffic stream becomes extremely difficult. Level of service F describes conditions in a queue that has formed behind a point of breakdown or disruption. As vehicles shuffle through the queue, there may be periods when they move quickly, and others when they are stopped completely. Thus this level of service is used to describe the point of breakdown as well, even though operations downstream of such a breakdown may appear good. Level of service F represents the region of forced flow, having low speed, and complete breakdown of the system.
Key Takeaways:
References:
1. L.R. Kadiyali, Transportation Engineering, Khanna Publishing House
2. Saxena, Subhash C, A Textbook of Highway and Traffic Engineering, CBS Publishers &
Distributers, New Delhi
3. Kumar, R Srinivasa, “A Text book of Highway Engineering”, Universities Press,
Hyderabad.
4. Kumar, R Srinivasa, “Pavement Design”, Universities Press, Hyderabad.
5. Chakraborty Partha& Das Animesh., “Principles of Transportation Engineering”,
Prentice Hall (India), New Delhi,
6. IRC : 37- Latest revision, “Tentative Guidelines for the design of Flexible Pavements”
Indian Roads Congress, New Delhi
7. IRC:58-2015 Guidelines for the Design of Plain Jointed Rigid Pavements for Highways
(Fourth Revision) (with CD)
8. IRC:65-2017 Guidelines for Planning and Design of Roundabouts (First Revision)
9. IRC:73-1980 Geometric Design Standards for Rural (Non-Urban) Highways
10. IRC:106-1990 Guidelines for Capacity of Urban Roads in Plain Areas
11. IRC:93-1985 Guidelines on Design and Installation of Road Traffic Signals.
12. IRC:92-2017 Guidelines for Design of Interchanges in Urban Areas (First Revision)
13. IRC: SP: 68-2005, “Guidelines for Construction of Roller Compacted Concrete Pavements”,
Indian Roads Congress, New Delhi.
14. IRC: 15-2002, “Standard Specifications and Code of Practice for construction of Concrete
Roads” Indian Roads Congress, New Delhi.
15. MORTH, “Specifications for Road and Bridge Works”, Ministry of Shipping, Road
Transport & Highways, Published by Indian Roads Congress, New Delhi.




