Unit - 4
Curves and Surfaces
The graph of a function of two variables is an example of a surface.
The equation which satisfies all three variables on the surface becomes coordinates of points (x, y, z).
It is natural 3D extensions, therefore, called a cone.
There are six quadric surfaces are as follows:
- Ellipsoid
- Elliptic paraboloid
- Hyperbolic paraboloid
- Double cone
- Hyperboloid of one sheet
- Hyperboloid of two sheet
The quadric surfaces are used in various multivariable calculus.
A simple example of a unit is a sphere with a set of points (x, y, z) which satisfies the condition x2 + y2 + z2=1
It is a quadric surface that define by equation,
(x − x0) 2 + (y − y0) 2 + (z − z0) 2 = r 2
The point (x0.y0, z0) is the center of sphere in 3D space.
The point (x, y, z) are the points whose distance to the center is given by r.
The sphere is symmetric about all coordinate planes.
The sphere is a bounded quadric surface.

Fig. 1
Ellipse is the generation of the circle but ellipsoid is the generation of the sphere.
The ellipsoid is also an ellipse in all sections.
The ellipsoid is bounded by points (x, y, z).
The ellipsoid is shown with the equation,
X2/A2 + y2/B2 + z2/C2 =1
The ellipsoid is the easiest quadric surface to draw accurately.
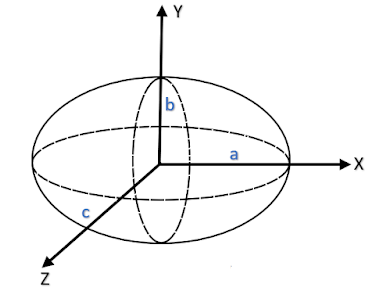
Fig. 2
The object that changes its surface characteristic in certain motion instead of fixed shapes is called as blobby objects.
When proximity to another object has occurred then it changes the surface qualities.
For example, molecular structure, water droplet, and other liquid effects.
The object is known as exhibiting blobbiness because its shapes show a certain degree of fluidity.
Blobby objects change their molecular structure very easily.
Hence it cannot be described as a sphere or elliptical shape.
Need to model surface shapes so that the total volume of the blobby object remains constant.


Fig. 3
The Spline is the polynomial with special functions defined piecewise.
In polynomial interpolation, spline interpolation is preferred.
The spline is often used in graphics because its construction is easy, the accuracy of evaluation, and capacity to approximate complex shapes through curve fitting.
The following figure shows the representation of the spline.
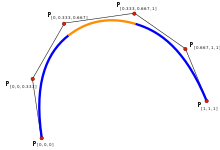
Fig. 4
The B-spline curve overcomes the limitation of the Bezier curve as the Bezier curve has limited flexibility.
It is a special case of Berstein basis.
It is a non-global method.
It consists of a linear combination of control points Pi and B-spline basis function Ni.
The mathematical representation of the B-spline curve is,
C(t) = ∑ Pi * N (i, k) (t)
Where summation limitation is n to i=0 and n >= k-1, t belongs to (tk - 1, tn + 1)
Here k is the order of polynomial segments of the B-spline curve.
N (i, k) (t) it is a normalized B-spline blending function.
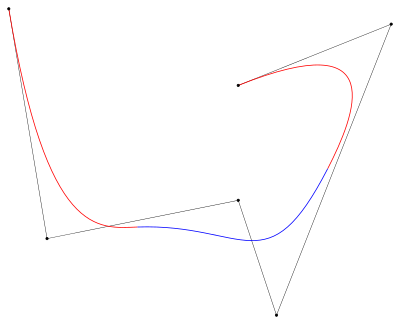
Fig. 5
Properties of B-spline curve:
- The sum of the B-spline basis function for any parameter value is 1.
- For all parameter values, each basis function is positive or 0.
- Each basis function has one maximum value except for k=1.
- The number of vertices in a polygon is equal to the maximum order of the curve.
- The degree of B-spline polynomial is independent of the number of vertices of the polygon.
- The B-spline curve allows local control over the curve surface.
- It explicit the variation diminishing property.
- It follows the shape of the defining polygon.
The Bezier curve is developed by French engineer Pierre Bezier.
The Bezier curve is generated under the control of other points.
To generate the Bezier curve approximate tangents are used by using control points.
The mathematical representation of the Bezier curve is,
∑ Pi * B ni (t) where summation from n to k=0
Pi is the set of points and B(t) is Bernstein polynomials as B(t)= (n, i) (1 - t) n-I * ti
The simple Bezier curve is a straight line from P0 to P1.
A quadratic Bezier curve has three control points.
A cubic Bezier curve is determined by four control points.
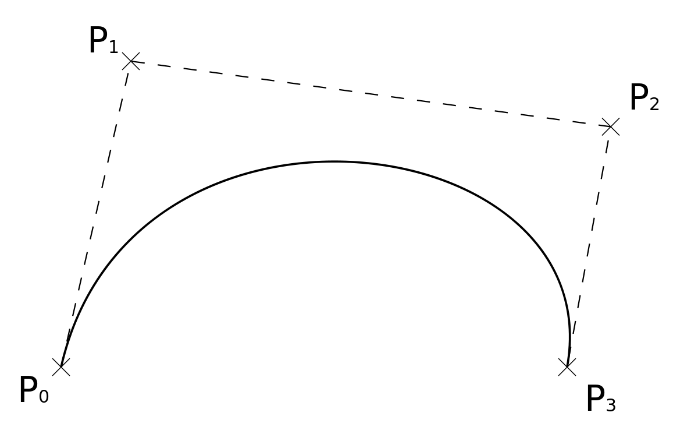
Fig. 6
Properties of Bezier curve:
- It follows the shape of the control polygon which consists of the segment joining the control points.
- It always passes through the first and last control point.
- The convex hull contains the Bezier curve with a defining control point.
- The degree of the polynomial defining the curve segment is 1 less.
- The Bezier curve follows the polynomial control points.
References:
1. Donald Hearn and M Pauline Baker, “Computer Graphics C Version”, Pearson Education
2. Foley, Vandam, Feiner, Hughes – “Computer Graphics principle”, Pearson Education.
3. Rogers, “Procedural Elements of Computer Graphics”, McGraw Hill
4. W. M. Newman, R. F. Sproull – “Principles of Interactive Computer Graphics” – Tata McGraw Hill.
5. Amrendra N Sinha And Arun D Udai,” Computer Graphics”, Tata McGraw Hill.
6. R.K. Maurya, “Computer Graphics” Wiley Dreamtech Publication.
7. M.C. Trivedi, NN Jani, Computer Graphics & Animations, Jaico Publications
8 Rishabh Anand, Computer Graphics- A practical Approach, Khanna Publishing House
9. Mukherjee, Fundamentals of Computer graphics & Multimedia, PHI Learning Private Limited.
10. Donald Hearn and M Pauline Baker, “Computer Graphics with OpenGL”, Pearson education




