UNIT-5
Multivariable calculus
Limits-
The function f(x,y) is said to tend to limit ‘l’ , as x →a and y→b Iff the limit is dependent on point (x,y) as x →a and y→b
We can write this as,
Example-1: evaluate the 
Sol. We can simply find the solution as follows,

Example-2: evaluate 
Sol.
 -6.
-6.
Example-3: evaluate 
Sol.

Conitinuity –
At point (a,b) , a function f(x,y) is said to be continuous if,

Working rule for continuity-
Step-1: f(a,b) should be well defined.
Step-2:  should exist.
should exist.
Step-3: 
Example-1: Test the continuity of the following function-
Sol. (1) the function is well defined at (0,0)
(2) check for the second step,

That means the limit exists at (0,0)
Now check step-3:

So that the function is continuous at origin.
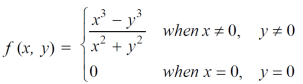
Example-2: check for the continuity of the following function at origin,
Sol. (1) Here the function is well defined at (0,0)
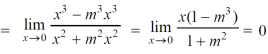
(2) check for second step-

Limit f is not unique for different values of m
So that the limit does not exists.
Therefore the function is not continuous at origin.
Steps to check for existence of limit-
Step-1: find the value of f(x,y) along x →a and y→b
Step-2: find the value of f(x,y) along x →b and y→a
Note- if the values in step -1 and step-2 are same then we can say that the limits exist otherwise not.
Step-3: if a →0 and b→0 then find the limit along y =mx , if the value does not contain m then limit exist, If it contains m then the limit does not exist.
Note-1- put x = 0 and y = 0 in f , then find f1
2 - Put y = 0 and x = 0 In f then find x2
If f1 and f2 are equal then limit exist otherwise not.
3- put y = mx then find f3
If f1 = f2 ≠f3, limit does not exist.
4- put y = mx² and find f4,
If f1 = f2 = f3 ≠ f4 , limit does not exist
If f1 = f2 = f3 = f4 , limit exist.
Example-1: Evaluate 
Sol . 1. 
2. 
Here f1 = f2
3. Now put y = mx, we get

Here f1 = f2 = f3
Now put y = mx²
4. 
Therefore ,
F1 = f2 = f3 =f4
We can say that the limit exists with 0.
Example-2: evaluate the following-

Sol. First we will calculate f1 –
Here we see that f1 = 0
Now find f2,
Here , f1 = f2
Therefore the limit exists with value 0.
First order partial differentiation-
Let f(x , y) be a function of two variables. Then the partial derivative of this function with respect to x can be written as  and defined as follows:
and defined as follows:
 =
= 
Now the partial derivative of f with respect to f can be written as  and defined as follows:
and defined as follows:
 =
= 
Note: a. While calculating partial derivatives treat all independent variables, other than the variable with respect to which we are differentiating, as constant.
b. We apply all differentiation rules.
Higher order partial differentiation-
Let f(x , y) be a function of two variables. Then its second-order partial derivatives, third order partial derivatives and so on are referred as higher order partial derivatives.
These are second order four partial derivatives:
(a)  =
= 
(b)  =
= 
(c)  =
= 
(d)  =
= 
b and c are known as mixed partial derivatives.
Similarly we can find the other higher order derivatives.
Example-1: - Calculate  and
and  for the following function
for the following function
f(x , y) = 3x³-5y²+2xy-8x+4y-20
Sol. To calculate  treat the variable y as a constant, then differentiate f(x,y) with respect to x by using differentiation rules,
treat the variable y as a constant, then differentiate f(x,y) with respect to x by using differentiation rules,
 =
=  [3x³-5y²+2xy-8x+4y-20]
[3x³-5y²+2xy-8x+4y-20]
=  3x³] -
3x³] -  5y²] +
5y²] +  [2xy] -
[2xy] - 8x] +
8x] + 4y] -
4y] -  20]
20]
= 9x² - 0 + 2y – 8 + 0 – 0
= 9x² + 2y – 8
Similarly partial derivative of f(x,y) with respect to y is:
 =
=  [3x³-5y²+2xy-8x+4y-20]
[3x³-5y²+2xy-8x+4y-20]
=  3x³] -
3x³] -  5y²] +
5y²] +  [2xy] -
[2xy] - 8x] +
8x] + 4y] -
4y] -  20]
20]
= 0 – 10y + 2x – 0 + 4 – 0
= 2x – 10y +4.
Example-2: Calculate  and
and  for the following function
for the following function
f( x, y) = sin(y²x + 5x – 8)
Sol. To calculate  treat the variable y as a constant, then differentiate f(x,y) with respect to x by using differentiation rules,
treat the variable y as a constant, then differentiate f(x,y) with respect to x by using differentiation rules,

 [sin(y²x + 5x – 8)]
[sin(y²x + 5x – 8)]
= cos(y²x + 5x – 8) (y²x + 5x – 8)
(y²x + 5x – 8)
= (y² + 50) cos(y²x + 5x – 8)
Similarly partial derivative of f(x,y) with respect to y is,

 [sin(y²x + 5x – 8)]
[sin(y²x + 5x – 8)]
= cos(y²x + 5x – 8) (y²x + 5x – 8)
(y²x + 5x – 8)
= 2xy cos(y²x + 5x – 8)
Example-3: Obtain all the second order partial derivative of the function:
f( x, y) = ( x³y² - xy⁵)
Sol.  3x²y² - y⁵,
3x²y² - y⁵,  2x³y – 5xy⁴,
2x³y – 5xy⁴,
 =
=  = 6xy²
= 6xy²
 =
=  2x³ - 20xy³
2x³ - 20xy³
 =
=  = 6x²y – 5y⁴
= 6x²y – 5y⁴
 =
=  = 6x²y - 5y⁴
= 6x²y - 5y⁴
Example-4: Find

Sol. First we will differentiate partially with respect to r,


Now differentiate partially with respect to θ, we get


Example-5: if,

Then find.

Sol-
Example-6: if  , then show that-
, then show that- 
Sol. Here we have,
u =  …………………..(1)
…………………..(1)
Now partially differentiate eq.(1) w.r to x and y , we get
= 
Or

 ………………..(2)
………………..(2)
And now,

= 
 ………………….(3)
………………….(3)
Adding eq. (1) and (3) , we get

 = 0
= 0
Hence proved.
Before Euler’s theorem, we will go through homogeneous functions,
(a) Homogeneous function - A function f(x,y) is said to be homogeneous of degree n if,
f( kx, ky) = kⁿf(x, y)
Here, the power of k is called the degree of homogeneity.
(b) Euler’s theorem-
Statement – if u = f(x, y) be a homogeneous function in x and y of degree n , then
x + y
+ y  = nu
= nu
Proof: Here u is a homogeneous function of degree n,
u = xⁿ f(y/x) ----------------(1)
Partially differentiate equation (1) with respect to x,
 = n
= n f(y/x) + xⁿ f’(y/x).(
f(y/x) + xⁿ f’(y/x).( )
)
Now multiplying by x on both sides, we get
x = n
= n f(y/x) + xⁿ f’(y/x).(
f(y/x) + xⁿ f’(y/x).( ) ---------- (2)
) ---------- (2)
Again partially differentiate equation (1) with respect to y,
 = xⁿ f’(y/x).
= xⁿ f’(y/x).
Now multiplying by y on both sides,
y  = xⁿ f’(y/x).
= xⁿ f’(y/x). ---------------(3)
---------------(3)
By adding equation (2) and (3),
x y
y  = n
= n f(y/x) + + xⁿ f’(y/x).(
f(y/x) + + xⁿ f’(y/x).( ) + xⁿ f’(y/x).
) + xⁿ f’(y/x).
x y
y  = n
= n f(y/x)
f(y/x)
Here u = f( x, y) is homogeneous function, then - u =  f(y/x)
f(y/x)
Put the value of u in equation (4),
x y
y  = nu
= nu
Which is the Euler’s theorem.
Lets understand Eulers’s theorem by some examples:
Example1- If u = x²(y-x) + y²(x-y), then show that 
 -2 (x – y)²
-2 (x – y)²
Solution - here, u = x²(y-x) + y²(x-y)
u = x²y - x³ + xy² - y³,
Now differentiate u partially with respect to x and y respectively,
 = 2xy – 3x² + y² --------- (1)
= 2xy – 3x² + y² --------- (1)
 = x² + 2xy – 3y² ---------- (2)
= x² + 2xy – 3y² ---------- (2)
Now adding equation (1) and (2), we get

 = -2x² - 2y² + 4xy
= -2x² - 2y² + 4xy
= -2 (x² + y² - 2xy)
= -2 (x – y)²
Example2- If u = xy + sin(xy), show that  =
=  .
.
Solution – u = xy + sin(xy)
 = y+ ycos(xy)
= y+ ycos(xy)
 = x+ xcos(xy)
= x+ xcos(xy)
 x (- sin(xy).(y)) + cos(xy)
x (- sin(xy).(y)) + cos(xy)
= 1 – xysin(xy) + cos(xy) -------------- (1)
 1 + cos(xy) + y(-sin(xy) x)
1 + cos(xy) + y(-sin(xy) x)
= 1 – xy sin(xy) + cos(xy) -----------------(2)
From equation (1) and (2),
 =
= 
Example-3: If u(x,y,z) = log( tan x + tan y + tan z) , then prove that ,

Sol. Here we have,
u(x,y,z) = log( tan x + tan y + tan z) ………………..(1)
Diff. Eq.(1) w.r.t. x , partially , we get

 ……………..(2)
……………..(2)
Diff. Eq.(1) w.r.t. y , partially , we get

 ………………(3)
………………(3)
Diff. Eq.(1) w.r.t. z , partially , we get

 ……………………(4)
……………………(4)
Now multiply eq. 2 , 3 , 4 by sin 2x , sin 2y , sin 2z respectively and adding , in order to get the final result,
We get,



= 
So that,
 hence proved.
hence proved.
When we measure the rate of change of the dependent variable owing to any change in a variable on which it depends, when none of the variable is assumed to be constant.
Let the function, u = f( x, y), such that x = g(t) , y = h(t)
ᵡ Then we can write,
 =
= 
= 
This is the total derivative of u with respect to t.
Change of variable-
If w = f (x, y) has continuous partial variables fx and fy and if x = x (t), y = y (t) are
Differentiable functions of t, then the composite function w = f (x (t), y (t)) is a
Differentiable function of t.
In this case, we get,
 fx (x (t), y (t)) x’ (t) + fy (x(t), y (t)) y’ (t).
fx (x (t), y (t)) x’ (t) + fy (x(t), y (t)) y’ (t).
Example-:1 let q = 4x + 3y and x = t³ + t² + 1 , y = t³ - t² - t
Then find  .
.
Sol. :  . =
. = 
Where, f1 =  , f2 =
, f2 = 
In this example f1 = 4 , f2 = 3
Also,  3t² + 2t ,
3t² + 2t , 
 4(3t² + 2t) + 3(
4(3t² + 2t) + 3(
= 21t² + 2t – 3
Example-2: Find  if u = x³y⁴ where x = t³ and y = t².
if u = x³y⁴ where x = t³ and y = t².
Sol. As we know that by definition,  =
= 
 3x²y⁴3t² + 4x³y³2t = 17t¹⁶.
3x²y⁴3t² + 4x³y³2t = 17t¹⁶.
Example-3: if w = x² + y – z + sint and x + y = t, find
(a)  y,z
y,z
(b)  t, z
t, z
Sol. With x, y, z independent, we have
t = x + y, w = x² + y - z + sin (x + y).
Therefore,
 y,z = 2x + cos(x+y)
y,z = 2x + cos(x+y) (x+y)
(x+y)
= 2x + cos (x + y)
With x, t, z independent, we have
Y = t-x, w= x² + (t-x) + sin t
Thus  t, z = 2x - 1
t, z = 2x - 1
Example-4: If u = u( y – z , z - x , x – y) then prove that  = 0
= 0
Sol. Let,

Then,

By adding all these equations we get,
 = 0 hence proved.
= 0 hence proved.
Example-5: if φ( cx – az , cy – bz) = 0 then show that ap + bq = c
Where p =  q =
q = 
Sol. We have,
φ( cx – az , cy – bz) = 0
φ( r , s) = 0
Where,
We know that,
Again we do,
By adding the two results, we get

Example-6: If z is the function of x and y , and x =  , y =
, y =  , then prove that,
, then prove that,
Sol. Here , it is given that, z is the function of x and y & x , y are the functions of u and v.
So that,
 ……………….(1)
……………….(1)
And,
 ………………..(2)
………………..(2)
Also there is,
x =  and y =
and y =  ,
,
Now,
 ,
,  ,
,  ,
, 
From equation(1) , we get
 ……………….(3)
……………….(3)
And from eq. (2) , we get
 …………..(4)
…………..(4)
Subtracting eq. (4) from (3), we get

 =
=  )
)  – (
– (
= x
Hence proved.
If u and v are functions of the two independent variables x and y , then the determinant,

Is known as the jacobian of u and v with respect to x and y, and it can be written as,
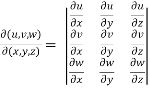
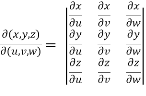
Suppose there are three functions u , v and w of three independent variables x , y and z then,
The Jacobian can be defined as,
Important properties of the Jacobians-
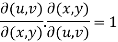
Property-1-
If u and v are the functions of x and y , then
Proof- Suppose u = u(x,y) and v = v(x,y) , so that u and v are the functions of x and y,
Now,
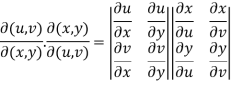
Interchange the rows and columns of the second determinant, we get
= 
= 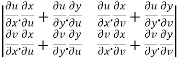 ………….(1)
………….(1)
Differentiate u = u(x,y) and v= v(x,y) partially w.r.t. u and v, we get



Putting these values in eq.(1) , we get
 hence proved.
hence proved.
Property-2:
Suppose u and v are the functions of r and s, where r,s are the functions of x , y, then,
Proof:  =
= 
Interchange the rows and columns in second determinant
We get,
= 
= 
=  =
= 
Similarly we can prove for three variables.
Property-3
If u,v,w are the functions of three independent variables x,y,z are not independent , then,

Proof: here u,v,w are independent , then f(u,v,w) = 0 ……………….(1)
Differentiate (1), w.r.t. x, y and z , we get
 …………(2)
…………(2)
 ………………(3)
………………(3)
 ………………..(4)
………………..(4)
Eliminate  from 2,3,4 , we get
from 2,3,4 , we get

Interchanging rows and columns, we get

 = 0
= 0
So that,

Example-1: If x = r sin , y = r sin
, y = r sin , z = r cos
, z = r cos , then show that
, then show that
 sin
sin also find
also find 
Sol. We know that,


= 
= 
=  ( on solving the determinant)
( on solving the determinant)
= 
Now using first property of Jacobians, we get

Example-2: If u = x + y + z , uv = y + z , uvw = z , find 
Sol. Here we have,
x = u – uv = u(1-v)
y = uv – uvw = uv( 1- w)
And z = uvw
So that,
 =
=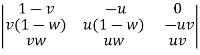
Apply 
=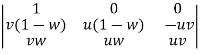
Now we get,
= u²v(1-w) + u²vw
= u²v
Example-3: If u = xyz , v = x² + y² + z² and w = x + y + z, then find J = 
Sol. Here u ,v and w are explicitly given , so that first we calculate
J’ = 
J’ =  =
= 
= yz(2y-2z) – zx(2x – 2z) + xy (2x – 2y) = 2[yz(y-z)-zx(x-z)+xy(x-y)]
= 2[x²y - x²z - xy² + xz² + y²z - yz²]
= 2[x²(y-z) - x(y² - z²) + yz (y – z)]
= 2(y – z)(z – x)(y – x)
= -2(x – y)(y – z)(z – x)
By the property,
JJ’ = 1
J = 
The real-valued functions  of n variables
of n variables  …..
…..  defined on an open subset D of
defined on an open subset D of  are said to be functionally dependent in D. If there exists a real valued function of F of n variables, such that-
are said to be functionally dependent in D. If there exists a real valued function of F of n variables, such that-
1. One of  , 1
, 1 , is different from zero at every point of the range of the mapping from
, is different from zero at every point of the range of the mapping from  which is defined by (
which is defined by ( …..
…..  …..
…..  )
)
Where,

 …..
…..  , I = 1,2,3……n
, I = 1,2,3……n
2. F(
Theorem: If u = f(x , y) and v = g(x , y) are differentiable on an open subset D of  and are functionally dependent on D , then
and are functionally dependent on D , then
Proof: from the above definition , there exists a real valued function F(u,v) such that,
F(u,v) = F(f(x,y) , g(x,y)) = 0 ………………….(1)
For all x and y which belongs to D and
Either  at every point (u,v) of the range of the mapping
at every point (u,v) of the range of the mapping
(x,y) → (f(x,y) , g(x,y))
Differentiate eq.1 partially with respect to x and y using chain rule,
And

Since for any point (x,y) which belongs to D either 
Above two equations implies that,
Example: Prove that the following functions are functionally dependent.
f(x , y) = log x – log y and g(x , y) = 
Sol. We have,
f(x , y) = log x – log y …………………(1)
g(x , y) =  …………………………(2)
…………………………(2)
Here we will find x from the second equation and substitute in (1) , which will show the relation between the two.
Write f(x,y) = f and g(x,y) = g for convenience,
From equation (1) , we get
2g.xy = 





Lets consider,

x = y [ g + 
Put this value in eq.(1), we get
f = log x – log y
= log y [ g +  – log y
– log y
= log y + log y ( g +  – log y
– log y
f = log (g + 
The functional relationship F(u,v) = 0 is,
F(u,v) = u - log (v + 
Now we can verify that,
F(f(x,y) , g(x,y)) = 0
The jacobian will also be zero.
Generally to calculate the stationary value of a function with some relation by converting the given function into the least possible independent variables and then solve them. When this method fail we use Lagrange’s method.
This method is used to calculate the stationary value of a function of several variables which are all not independent but are connected by some relation.
Let  be the function in the variable x, y and z which is connected by the relation
be the function in the variable x, y and z which is connected by the relation 
Rule: a) Form the equation

Where  is a parameter.
is a parameter.
b) Form the equation using partial differentiation is
(We always try to eliminate )
)
c) Solve the all above equation with the given relation 
These give the value of 
These value obtained when substituted in the given function will give the stationary value of the function.
Example1 Divide 24 into three parts such that the continued product of the first, square of second and cube of third may be maximum.
Let first number be x, second be y and third be z.
According to the question
Let the given function be f
And the relation 
By Lagrange’s Method

 ….(i)
….(i)
Partially differentiating (i) with respect to x,y and z and equate them to zero

 ….(ii)
….(ii)

 ….(iii)
….(iii)

 ….(iv)
….(iv)
From (ii),(iii) and (iv) we get

On solving

Putting it in given relation we get

Or 
Or 
Thus the first number is 4 second is 8 and third is 12
Example2 The temperature T at any point  in space is
in space is  .Find the highest temperature on the surface of the unit sphere.
.Find the highest temperature on the surface of the unit sphere.
Given function is 
On the surface of unit sphere given  [
[ is an equation of unit sphere in 3 dimensional space]
is an equation of unit sphere in 3 dimensional space]
By Lagrange’s Method

 ….(i)
….(i)
Partially differentiating (i) with respect to x, y and z and equate them to zero
 or
or  …(ii)
…(ii)
 or
or  …(iii)
…(iii)
 …(iv)
…(iv)
Dividing (ii) and (ii) by (iv) we get

Using given relation 
Or  Or
Or 
So that 
Or 
Thus points are 
The maximum temperature is 
Example3 If  ,Find the value of x and y for which
,Find the value of x and y for which  is maximum.
is maximum.
Given function is 
And relation is 
By Lagrange’s Method

 [
[ ] ..(i)
] ..(i)
Partially differentiating (i) with respect to x, y and z and equate them to zero

Or  …(ii)
…(ii)

Or  …(iii)
…(iii)

Or  …(iv)
…(iv)
On solving (ii),(iii) and (iv) we get


Using the given relation we get 



So that 
Thus the point for the maximum value of the given function is 
Example4 Find the points on the surface  nearest to the origin.
nearest to the origin.
Let  be any point on the surface, then its distance from the origin
be any point on the surface, then its distance from the origin  is
is

Thus the given equation will be

And relation is 
By Lagrange’s Method

 ….(i)
….(i)
Partially differentiating (i) with respect to x, y and z and equate them to zero

Or  …(ii)
…(ii)

Or  …(iii)
…(iii)

Or 
Or 
On solving equation (ii) by (iii) we get

And 
On subtracting we get 
Putting in above 
 Or
Or 
Thus 
Using the given relation we get
 = 0.0 +1=1
= 0.0 +1=1
Or 
Thus point on the surface nearest to the origin is 




