UNIT-2
SIMPLE HARMONIC OSCILLATOR
MECHANICAL SIMPLE HARMONIC OSCILLATORS
The figure-1 depicts simple mechanical oscillator having mass attached to the spring. This structure is similar to Pendulum. It is also known as harmonic oscillator.
|
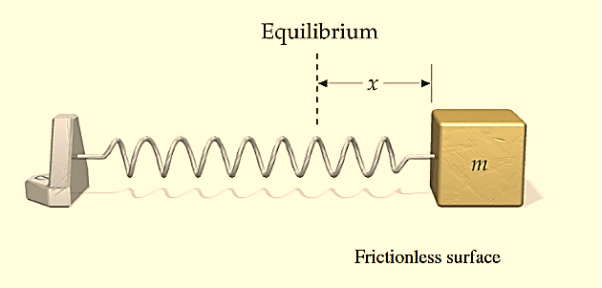
Figure 1: Simple Mechanical Oscillator
If a body attached to a spring is displaced from its equilibrium position, the spring exerts a restoring force on it, which tends to restore the object to the equilibrium position. This force causes oscillation of the system, or periodic motion.
When the restoring force is directly proportional to the displacement from equilibrium, the resulting motion is known as simple harmonic motion and the oscillator is known as Harmonic Oscillator.
In this type of system body itself changes its position.
For mechanical oscillation two things are especially responsible i.e. Inertia & Restoring force.
Differential Equation
A particle is said to be execute simple harmonic oscillation is the restoring force is directed towards the equilibrium position and its magnitude is directly proportional to the magnitude and displacement from the equilibrium position. If F is the restoring force on the oscillator when its displacement from the equilibrium position is x, then
F –x
–x
Here, the negative sign implies that the direction of restoring force is opposite to that of displacement of body i.e. towards equilibrium position.
F= -kx ............. (1)
Where, k= proportionality constant called force constant.
An example of such a simple system is the mass m, attached to a spring of stiffness k.
|
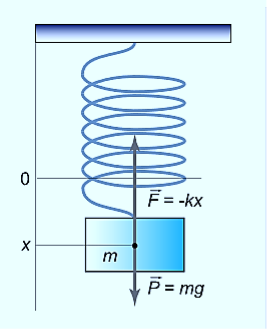
Figure 2: Spring Mass System
In the case of a mass on a spring, the restoring force for small oscillations obeys Hooke’s law: F=−kx, where k is the stiffness of the spring. Here the coordinate x=0 corresponds to the point of equilibrium, in which the force of gravity is balanced by the initial tension of the spring. Then, according to Newton’s second law, the movement of the mass will be described by the differential equation mx′′=−kx, ⇒x′′+ Solution of differential equation is x= Acosωt Thus, the mass on the spring will perform undamped harmonic oscillations with the circular frequency ω= The period of oscillation, respectively, will be equal to T= A similar analysis of other oscillatory system – a simple (mathematical) pendulum – leads to the following formula for the oscillation period: T=2π where L is the length of the pendulum, g is the acceleration of gravity. In the case of a compound or physical pendulum, the period of oscillation is given by T=2π where I is the moment of inertia of the pendulum about the pivot point, m is the mass of the pendulum, a is the distance between the pivot point and the center of mass of the pendulum.
|






Example: oscillation of mass spring system, oscillation of fluid-column in a U-tube, oscillation of simple pendulum, rotation of earth around the sun, oscillation of body dropped in a tunnel along earth diameter, oscillation of floating cylinder, oscillation of a circular ring suspended on a nail, oscillation of atoms and ions of solids, vibration of swings etc.
ELECTRICAL SIMPLE HARMONIC OSCILLATORS
Whenever we connect a charged capacitor to an inductor the electric current and charge on the capacitor in the circuit undergoes LC Oscillations. The process continues at a definite frequency and if no resistance is present in the LC circuit, then the LC Oscillations will continue indefinitely.
This circuit is known as an LC oscillator. Let’s take a capacitor with capacitance C and an inductor with inductance L. The capacitor is fully charged with charge Qo. What we do here is to connect the capacitor and the inductor end to end.
|
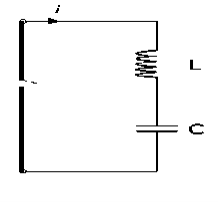
Figure 3: Electrical Simple Harmonic Oscillators
Assuming the inductor and capacitor to be ideal (meaning resistance will be zero in the overall circuit). Initially, the capacitor C of the LC circuit carries a charge Qo and current I in the Inductor is zero. Therefore at time T = 0, the charge on the capacitor will be: q(T=0)=Qo Current Flowing: I=0 At time T = t, the capacitor now begins to discharge through the inductor. The current begins to flow in an anti-clockwise direction. Therefore the charge of the capacitor decreases, but the energy of the inductor increases. The energy gets transferred from the capacitor to the inductor. At this stage, there is the maximum value of the current in the inductor. Then the relationship between the current and the charge will be: I=− The negative sign is added because as the time passes from 0 to t the, charge on the plates of capacitor decreases i.e. charge decreases with respect to time and thus the dq/dt obtained will be negative and this is why we add a negative sign to make a current positive. Applying Energy Conservation Since, Heat Loss = 0 and Kinetic Energy = 0. Total energy which is constant is given by:
Now initially we had charge Qo and current flowing was zero I=0. So, the total energy at T = 0, will only be the energy stored in the capacitor and energy stored in the inductor will be zero. Eo= Now on equating the value of total energy we get:
On differentiating with respect to t we get:
On further calculation we get the equation as: L Substituting the value of I from equation 1 we get:
Upon comparing (2) and (3), we have ω2 = ω = And now double differentiating equation 1 with respect to t we get:
We can see that the above both the equation 2 and 6 of Charge and Current both represent the Simple Harmonic Motion. That is both charge and current are oscillating as a simple harmonic waves with respect to time. Solution of Simple Harmonic Motion Equation In general charge as a function of time in SHM will be given as: q(t)=Qocos(ωt) where angular frequency ω = The figure-3 depicts electrical analogy of the mechanical oscillator. This is example of electronic or electrical oscillator. There are different types of oscillators viz. RC oscillator, LC oscillator, crystal oscillator etc. |





























Key Takeaways
|






We have seen that the total energy of a harmonic oscillator remains constant. Once started, the oscillations continue forever with a constant amplitude (which is determined from the initial conditions) and a constant frequency (which is determined by the inertial and elastic properties of the system). Simple harmonic motions which persist indefinitely without loss of amplitude are called free or undamped.
However, observation of the free oscillations of a real physical system reveals that the energy of the oscillator gradually decreases with time and the oscillator eventually comes to rest. For example, the amplitude of a pendulum oscillating in the air decreases with time and it ultimately stops. The vibrations of a tuning fork die away with the passage of time. This happens because, in actual physical systems, friction (or damping) is always present. Friction resists motion.
The presence of resistance to motion implies that frictional or damping force acts on the system. The damping force acts in opposition to the motion, doing negative work on the system, leading to a dissipation of energy. When a body moves through a medium such as air, water, etc. its energy is dissipated due to friction and appears as heat either in the body itself or in the surrounding medium or both.
There is another mechanism by which an oscillator loses energy. The energy of an oscillator may decrease not only due to friction in the system but also due to radiation. The oscillating body imparts periodic motion to the particles of the medium in which it oscillates, thus producing waves. For example, a tuning fork produces sound waves in the medium which results in a decrease in its energy.
All sounding bodies are subject to dissipative forces, or otherwise, there would be no loss of energy by the body and consequently, no emission of sound energy could occur. Thus, sound waves are produced by radiation from mechanical oscillatory systems. The electromagnetic waves are produced by radiations from oscillating electric and magnetic fields.
The effect of radiation by an oscillating system and of the friction present in the system is that the amplitude of oscillations gradually diminishes with time. The reduction in amplitude (or energy) of an oscillator is called damping and the oscillation are said to be damped.
When the energy of a oscillating system is gradually dissipated by friction and other resistances, the oscillations are said to be damped. The oscillations gradually reduce or change in frequency or intensity or cease and the system rests in its equilibrium position.
Damped oscillations refer to oscillations where the oscillating object loses its energy to the surroundings.
Damping, in physics, restraining of vibratory motion, such as mechanical oscillations, noise, and alternating electric currents, by dissipation of energy. Unless a child keeps pumping a swing, its motion dies down because of damping. Shock absorbers in automobiles and carpet pads are examples of damping devices.
A system may be so damped that it cannot oscillate. Critical damping just prevents oscillation or is just sufficient to allow the object to return to its rest position in the shortest period of time.
|
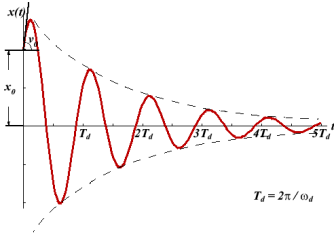
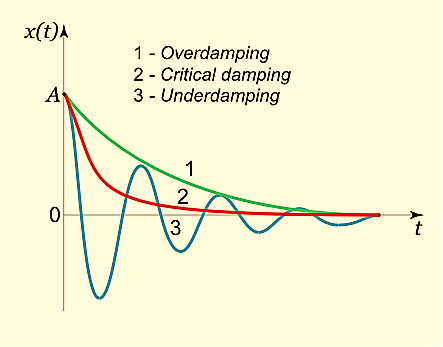
Figure 4: Damped Oscillations
There are many types of mechanical damping. Friction, also called in this context dry, or Coulomb, damping, arises chiefly from the electrostatic forces of attraction between the sliding surfaces and converts mechanical energy of motion, or kinetic energy, into heat. The motion of a oscillating body is also checked by its friction with the gas or liquid through which it moves.
Damped Oscillations
In real systems, there is always a resistance or friction, which leads to a gradual damping of the oscillations. In many cases, the resistance force (denoted by FC) is proportional to the velocity of the body, that is FC=−cx′. Then, taking into account the force of resistance, the differential equation for the “mass-spring” system is written as mx′′+cx′+kx=0, ⇒ x′′+ We introduce the following notations: x′′+2βx′+ We will seek the solution of this equation as a function x(t)=Aeλt. The derivatives are given by x′(t)=Aλeλt, x′′(t)=Aλ2eλt. Substituting this into the differential equation, we obtain the algebraic characteristic equation: Aλ2eλt+2βAλeλt+ ⇒λ2+2βλ+ The roots of this equation are D=4β2−4
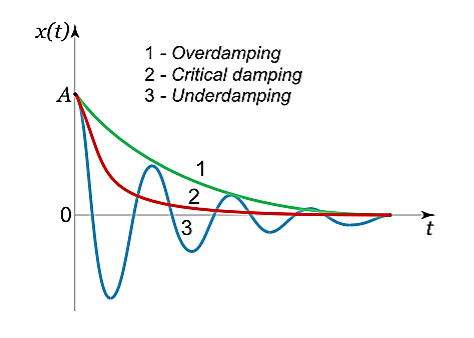
It can be seen that depending on the sign of the radicand β2− Case 1. Overdamping or Heavy Damping: β>ω0 When resistance to motion is.very strong, the system is said to be heavily damped. Can you name a heavily damped system of practical interest? Springs joining wagons of a train constitute the most important heavily damped system. In your physics laboratory, vibrations of a pendulum in a viscous medium such as thick oil and motion of the coil of a dead beat galvanometer are heavily damped systems. In this case (the case of strong damping), the radicand is positive: β2> x(t)=C1eλ1t+C2eλ2t, where the coefficients C1, C2, as usual, depend on the initial conditions. It follows from this expression that there are no oscillations and the system returns to equilibrium exponentially, i.e. aperiodically (Figure 5).
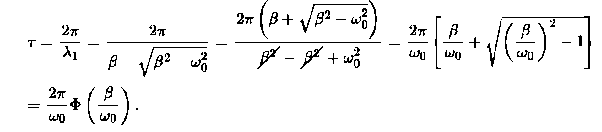
Figure 5: Damping Graph Case 2. Critical Damping: β=ω0 You may have observed that on hitting an isolated road bump, a car bounces up and down and the occupants feel uncomfortable. To minimise this discomfort, the bouncing caused by the road bumps must be damped very rapidly and the automobile is restored to equilibrium quickly. For this we use critically damped shock absorbers. Critical damping is also useful in recording instruments such as a galvanometer (pointer type as well as suspended coil type) which experience sudden impulses. We require the pointer to move to the correct position in minimum time and stay there without executing oscillations. Similarly, a ballistic galvanometer coil is required to return to zero displacement immediately. In the limiting case when β=ω0, the roots of the characteristic equation are real and coincide: λ1=λ2=−β=−ω0. Here the solution is given by the formula x(t)=(C1t+C2) In this mode, the value of x(t) may even increase at the beginning of the process because of the linear factor C1t+C2. But in the end the deflection x(t) decreases rapidly due to the exponential decay with a characteristic time τ=2π/ω0. Note that in this critical mode the relaxation occurs faster than in the case of the aperiodic damping (Case 1). Indeed, in this mode the relaxation time will be determined by the smaller (in absolute value) root λ1, and will be given by the formula
The function Φ(β/ω0) included in this expression is monotonically increasing. It is always greater than or equal to 1, as shown in Figure 6.
Figure 6: Graph of function Φ( In the critical case (Case 2) the ratio βω0 is 1, and βω0>1 in the case of the aperiodic damping (Case 1). Therefore for the aperiodic damping mode, we can write τ= Thus, the critical damping mode provides the fastest possible return of the system to equilibrium. This is often used, for example, in door closing mechanisms. Case 3. Underdamping or Light Damping β<ω0 Here the roots of the characteristic equation are complex conjugate: λ1,2 =−β±i√ The general solution of the differential equation is oscillatory in nature and can be written as x(t)=e−βt[C1cos(ω1t)+C2sin(ω1t)] where the oscillation frequency ω1 is equal to ω1= The resulting formula can be written in a somewhat different form: x(t)=Ae−βtcos(ω1t+φ0), where φ0 is the initial phase of the oscillations and Acosφ0 is the initial amplitude of the oscillations. We see that classical damped oscillations occur in this mode. Here the oscillation frequency ω1 is less than the harmonic frequency ω0, and the oscillation amplitude decreases exponentially with e−βt.
|




















Key Takeaways
- Damped oscillations refer to oscillations where the oscillating object loses its energy to the surroundings.
- When resistance to motion is.very strong, the system is said to be heavily damped. β>ω0
- The critical damping mode provides the fastest possible return of the system to equilibrium. . β = ω0
- In Case of Underdamping or Light Damping classical damped oscillations occur β<ω0
We know that in the presence of damping the amplitude of oscillation decreases with the passage of time. This means that energy is dissipated in overcoming resistance to motion. We know that, the total energy of a harmonic oscillator is made up of kinetic and potential components. We can still use the same definition and write E(t) = K.E. + P.E. = where ( x(t) = a0 exp(-bt) cos (ωdt +ϕ) By differentiating it with respect to time, we get instantaneous velocity:
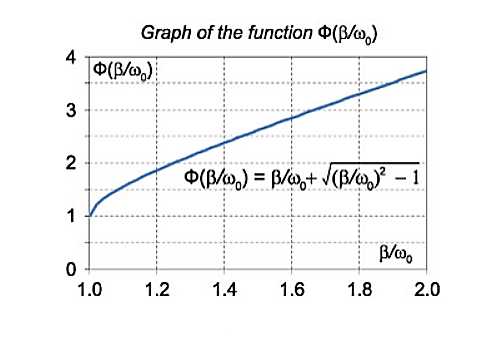
Hence, kinetic energy of the oscillator is K.E. = = Similarly, the potential energy of the oscillator is U =P.E.= Since k = On substituting for x, we get U = Hence, the total energy of the oscillator at any time t is given by E(t) = When damping is small, the amplitude of oscillation does not change much over one oscillation. So we may take the factor exp (-2bt) as essentially constant. Further, since < sin2 (ωdt +ϕ) > = < cos2 (ωdt +ϕ) > = <E> = < <E> = <E> = E0 = This shows that the average energy of a weakly damped oscillator decreases exponentially with time. This is illustrated in Figure 7. You will also observe that the rate of decay of energy depends on the value of b; larger the value of b, faster will be the decay.
Figure 7: Energy decay in a damped harmonic oscillator
|
























Key Takeaways
- In the presence of damping the amplitude of oscillation decreases with the passage of time. This means that energy is dissipated in overcoming resistance to motion.
- The total energy of a harmonic oscillator is made up of kinetic and potential components.
- E0 =
 m a02
m a02  is the total energy of an undamped oscillator.
is the total energy of an undamped oscillator. - The average energy <E> = Eo exp (- 2bt) of a weakly damped oscillator decreases exponentially with time.
The energy loss rate of a weakly damped (i.e., ν ) harmonic oscillator is conveniently characterized in terms of a parameter, Qf, which is known as the quality factor. This quantity is defined to be 2π times the energy stored in the oscillator, divided by the energy lost in a single oscillation period. If the oscillator is weakly damped then the energy lost per period is relatively small, and Qf is therefore much larger than unity. Roughly speaking, Qf is the number of oscillations that the oscillator typically completes, after being set in motion, before its amplitude decays to a negligible value. Let us find an expression for Qf.
) harmonic oscillator is conveniently characterized in terms of a parameter, Qf, which is known as the quality factor. This quantity is defined to be 2π times the energy stored in the oscillator, divided by the energy lost in a single oscillation period. If the oscillator is weakly damped then the energy lost per period is relatively small, and Qf is therefore much larger than unity. Roughly speaking, Qf is the number of oscillations that the oscillator typically completes, after being set in motion, before its amplitude decays to a negligible value. Let us find an expression for Qf.
As we have seen, the motion of a weakly damped harmonic oscillator is specified by
It follows that
the energy lost during a single oscillation period is
Where θ = ω1t- ϕ . Thus,
Hence, we obtain Yet another way of expressing the damping effect is by means of the rate of decay of energy. we note that the average energy of a weakly damped oscillator decays to Eoe-1 in time t = You will note that Q is only a number and has no dimensions. In general, For a weakly damped mechanical oscillator, the quality factor can be expressed in term; of the spring factor and damping constant. For weak damping, ωd Q = That is, the quality factor of a weakly damped oscillator is directly proportional to the square root of k and inversely proportional to In a more physically meaningful form Q = = |


![$\displaystyle = m \nu a^{2}\int_{\phi/\omega_1}^{(2\pi+\phi)/\omega_1}{\rm e}...
...{2} \cos(\omega_1 t-\phi) + \omega_1 \sin(\omega_1 t-\phi)\right]^{ 2} dt.$](https://glossaread-contain.s3.ap-south-1.amazonaws.com/epub/1642923700_2953584.png)





















Example: A 500 μH inductor, 80/π2 pF capacitor and a 628 Ω resistor are connected to form a series RLC circuit. Calculate the resonant frequency and Q-factor of this circuit at resonance.
Solution
L=500×10-6H; C = 80/π2 ×10−12 F; R = 628Ω
|

Key Takeaways
|




MECHANICAL OSCILLATORS
The simple harmonic oscillator describes many physical systems throughout the world, but early studies of physics usually only consider ideal situations that do not involve friction.
In the real world, however, frictional forces – such as air resistance – will slow, or dampen, the motion of an object. Sometimes, these dampening forces are strong enough to return an object to equilibrium over time.
|
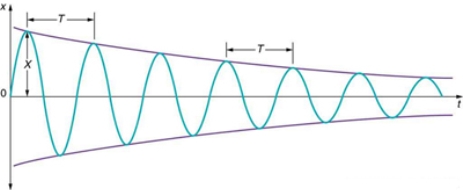
Figure 8: The position against time of our object moving in simple harmonic motion.
Illustrating the position against time of our object moving in simple harmonic motion. We see that for small damping, the amplitude of our motion slowly decreases over time.
The simplest and most commonly seen case occurs when the frictional force is proportional to an object’s velocity. Note that other cases exist which may lead to nonlinear equations which go beyond the scope of this example.
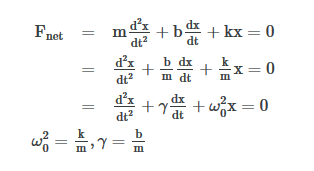
Consider an object of mass m attached to a spring of constant k. Let the damping force be proportional to the mass’ velocity by a proportionality constant, b, called the vicious damping coefficient. We can describe this situation using Newton’s second law, which leads to a second order, linear, homogeneous, ordinary differential equation. We simply add a term describing the damping force to our already familiar equation describing a simple harmonic oscillator to describe the general case of damped harmonic motion.
This notation uses d2x/dt2, the acceleration of our object, dx/dt, the velocity of our object, ω0, undamped angular frequency of oscillation, and We solve this differential equation for our equation of motion of the system, x(t). We assume a solution in the form of an exponential, where a is a constant value which we will solve for. x(t)=eat Plugging this into the differential equation we find that there are three results for a, which will dictate the motion of our system. We can solve for a by using the quadratic equation. Fnet=a2x+γax+ a= The physical situation has three possible results depending on the value of a, which depends on the value of what is under our radical. This expression can be positive, negative, or equal to zero which will result in overdamping, underdamping, and critical damping, respectively.
|








ELECTRICAL OSCILLATORS
Electric oscillations can be excited in a circuit containing resistance R, inductance L and capacitance C. the series RLC-circuit is shown in Figure 9
|
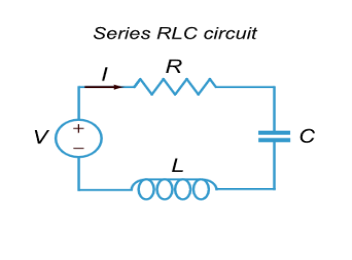
Figure 9: Series RLC circuit
We derive the differential equation describing the current change in a series RLC circuit. The voltages VR,VC,VL, respectively, on the resistor R, capacitor C and inductor L are given by VR(t)=RI(t), VC(t)= It follows from the Kirchhoff’s voltage law (KVL) that VR(t)+VC(t)+VL(t)=E(t), where E(t) is the electromotive force (emf) of the power supply. In the case of constant emf E, we obtain the following differential equation after substituting the expressions for VR, VC,VL and differentiation:
If we denote 2β=
This differential equation coincides with the equation describing the damped oscillations of a mass on a spring. Hence, damped oscillations can also occur in series RLC-circuits with certain values of the parameters. The second order differential equation describing the damped oscillations in a series RLC-circuit we got above can be written as
The corresponding characteristic equation has the form λ2+ Its roots are calculated by the formulas: λ 1,2 = where the value of β = Depending on the values of R,L,C there may be three options. Case 1. Overdamping: R2> In this case, both roots of the characteristic equation λ1 and λ2 and real, distinct and negative. The general solution of the differential equation is given by I(t)=C1 In this mode, the current decreases monotonically approaching zero Case 2. Critical Damping: R2= This mode can be called boundary or critical. Here, both roots of the characteristic equation are equal, real and negative. The general solution is expressed by the function I(t)=(C1t+C2)e−βt=)=(C1t+C2)exp(− At the beginning of the process, the current may even increase, but then it quickly decreases exponentially.
Figure 10: Damping graph
Case 3. Underdamping: R2< In this case, the roots of the characteristic equation are complex conjugate, which leads to damped oscillations in the circuit. The change of current is given by I(t)=e−βt(Acosωt+Bsinωt), where the value of β=
|
























Key Takeaways
|








References
1. H. J. Pain, “The physics of vibrations and waves”, Wiley, 2006
2. I. G. Main, “Vibrations and waves in physics’, 3rd Edn, Cambridge University Press, 2018.
3. W.T. Thomson, ‘Theory of Vibrations with Applications’.




