UNIT-4
First Order Ordinary Differential Equations
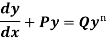
A differential equation of the form
Is called linear differential equation. It is also called Leibnitz’s linear equation. Here P and Q are the function of x Working rule (1)Convert the equation to the standard form (2) Find the integrating factor. (3) Then the solution will be y(I.F) =
Example-1: Solve-
Sol. We can write the given equation as-
So that- I.F. = The solution of equation (1) will be-
Or
Or
Or
Example-2: Solve-
Sol. We can write the equation as-
We see that it is a Leibnitz’s equation in x- So that-
Therefore the solution of equation (1) will be-
Or
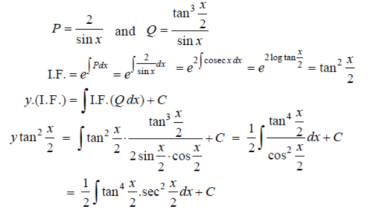
Example-3: Solve sin x Solution: here we have, sin x
Now,
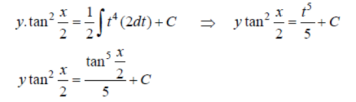
Put tan
Which is the required solution.
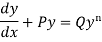
Bernoulli’s equation- The equation
Is reducible to the Leibnitz’s linear equation and is usually called Bernoulli’s equation.
Working procedure to solve the Bernoulli’s linear equation- Divide both sides of the equation - By
Put Then equation (1) becomes-
Here we see that it is a Leibnitz’s linear equations which can be solved easily.
Example: Solve Sol. We can write the equation as-
On dividing by
Put Equation (1) becomes,
Here,
Therefore the solution is-
Or
Now put
Integrate by parts-
Or Example: Solve Sol. here given,
Now let z = sec y, so that dz/dx = sec y tan y dy/dx Then the equation becomes-
Here,
Then the solution will be-
Example: Solve- Sol. here given-
We can re-write this as-
Which is a linear differential equation-
The solution will be-
Put
|
































Key takeaways-
is called linear differential equation OR Leibnitz’s linear equation. 2. The equation
called Bernoulli’s equation. |

Definition- An exact differential equation is formed by differentiating its solution directly without any other process,
Is called an exact differential equation if it satisfies the following condition-
Here
Step by step method to solve an exact differential equation- 1. Integrate M w.r.t. x keeping y constant. 2. Integrate with respect to y, those terms of N which do not contain x. 3. Add the above two results as below-
Example-1: Solve Sol. Here M =
Then the equation is exact and its solution is-
Example-2: Solve-
Sol. We can write the equation as below-
Here M = So that-
The equation is exact and its solution will be-
Or
Example-3: Determine whether the differential function ydx –xdy = 0 is exact or not.
Solution. Here the equation is the form of M(x , y)dx + N(x , y)dy = 0 But, we will check for exactness,
These are not equal results, so we can say that the given diff. eq. is not exact.
Equation reducible to exact form- 1. If M dx + N dy = 0 be an homogenous equation in x and y, then 1/ (Mx + Ny) is an integrating factor.
Example: Solve-
Sol. We can write the given equation as-
Here, M =
Multiply equation (1) by
This is an exact differential equation-
2. I.F. for an equation of the type IF the equation Mdx + Ndy = 0 be this form, then 1/(Mx – Ny) is an integrating factor.
Example: Solve-
Sol. Here we have- Now divide by xy, we get-
Multiply (1) by
Which is an exact differential equation-
3. In the equation M dx + N dy = 0, (i) If (ii) If
Example: Solve-
Sol. Here given,
M = 2y and N = 2x log x - xy Then-
Here,
Then,
Now multiplying equation (1) by 1/x, we get-
4. For the following type of equation-
An I.F. is Where-
Example: Solve-
Sol. We can write the equation as below-
Now comparing with-
We get- a = b = 1, m = n = 1, a’ = b’ = 2, m’ = 2, n’ = -1 I.F. = Where-
On solving we get- h = k = -3
Multiply the equation by
It is an exact equation. So that the solution is-
|




















































Key takeaways-
Is called an exact differential equation if it satisfies the following condition-
2. If M dx + N dy = 0 be an homogenous equation in x and y, then 1/ (Mx + Ny) is an integrating factor. 3. I.F. for an equation of the type IF the equation Mdx + Ndy = 0 be this form, then 1/(Mx – Ny) is an integrating factor. 4. For the following type of equation-
An I.F. is Where-
|






Equation solvable for p- Example- Solve-
Sol. Here we have-
or
On integrating, we get-
Equation solvable for y- Steps- First- differentiate the given equation w.r.t. x. Second- Eliminate p from the given equation, then the eliminant is the required solution. Example: Solve Sol. Here we have-
Now differentiate it with respect to x, we get-
Or
This is the Leibnitz’s linear equation in x and p, here
Then the solution of (2) is-
Or
Or
Put this value of x in (1), we get
Equation solvable for x- Example: Solve-
Sol. Here we have-
On solving for x, it becomes-
Differentiating w.r.t. y, we get-
or
On solving it becomes
Which gives-
Or
On integrating
Thus eliminating from the given equation and (1), we get
Which is the required solution.
Clairaut’s equation- An equation y = px + f(p) ...... (2) is known as Clairaut’s equation. Differentiating (1) w.r.t. x, we get-
Put the value of p in (1) we get- y = ax + f(a) Which is the required solution.
Example: Solve-
Sol. Put So that-
Then the given equation becomes-
Or
Or
Which is the Clairaut’s form. Its solution is-
i.e.
|






















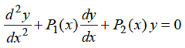
The standard form of of linear differential equation of second order with variable coefficients is-
Here P(x), Q(x) and F(x) are called functions of x and P, Q are known as coefficient of the Differential equation. Note- The above differential equation will be called non-homogeneous if F(x) is non zero. Second order DE with constant coefficient (Homogeneous)- The standard form of second order DE with constant coefficient is-
Here a and b are the constants. The auxiliary equation or characteristic equation is-
Now the general solution of homogeneous DE depends on the nature of two roots we get from auxiliary equation- Situation-1: When two roots are distinct and real- The general solution will be-
Where Situation-2: When two roots are repeated- The general solution will be-
Situation-3: In case of complex conjugate roots-
Example: Solve- y’’ – 3y’ + 2y = 0, y(0) = -1, y’(0) = 0. Sol. Here auxiliary equation will be-
We get-
Here, m = 2, 1 are two real and distinct roots- Then general solution will be-
Particular solution using conditions y(0) = -1, we get-
Now using y’(0) = 0, in the derivative of general solution, we get-
Now solving equation (1) and (2)-
Therefore the particular solution will be-
Example: Solve- y’’+3y’+2.25y = 0. Sol. We get auxiliary equation as-
Here the roots are repeated. So that the general solution will be-
Example: Solve- y’’-2y’+5y = 0, y(0) = -3, y’(0) = 1. Sol. Here the auxiliary equation will be-
So that-
We get complex conjugate here- The general solution in this case will be-
Now using y(0) = -3 in general solution, we get-
Now differentiate GS with respect to x-
Using- y’(0) = 1, we get-
Particular solution is-
|























Key takeaways-
Here P(x), Q(x) and F(x) are called functions of x and P, Q are known as coefficient of the Differential equation. 2. The standard form of second order DE with constant coefficient is-
Here a and b are the constants. 3. The auxiliary equation - 4. When two roots are distinct and real- 5. When two roots are repeated-
6. In case of complex conjugate roots- |






Method of variation of parameters- Consider a second order LDE with constant co-efficients given by
Then let the complimentary function
Then the particular integral is
Where u and v are unknown and to be calculated using the formula u=
Example-1: Solve the following DE by using variation of parameters-
Sol. We can write the given equation in symbolic form as-
To find CF- It’s A.E. is So that CF is- To find PI- Here Now Thus PI = = = = = So that the complete solution is-
Example-2: Solve the following by using the method of variation of parameters.
Sol. This can be written as-
C.F.- Auxiliary equation is- So that the C.F. will be- P.I.- Here Now Thus PI = = =
So that the complete solution is-
|

























Key takeaways-
|




An equation of the form
Here X is the function of x, is called Cauchy’s homogeneous linear equation. Example-1: Solve Sol. As it is a Cauchy’s homogeneous linear equation. Put Then the equation becomes [D(D-1)-D+1]y = t or Auxiliary equation-
So that- C.F.= Hence the solution is-
Example-2: Solve Sol. On putting
The given equation becomes-
Or it can be written as-
So that the auxiliary equation is- C.F. = Particular integral- Where It’s a Leibnitz’s linear equation having I.F.= Its solution will be-
P.I. = = So that the complete solution is-
An equation of the form-
Is called Legendre’s linear equation. Example-3: Solve Sol. As we see that this is a Legendre’s linear equation. Now put So that- And Then the equation becomes- D (D – 1)y+ Dy + y = 2 sin t
Its auxiliary equation is- And particular integral- P.I. = Note - Hence the solution is - |


























Key takeaways-
|

We know that the solution of the differential equation-
Are
These are the power series solutions of the given differential equations.
Ordinary Point- Let us consider the equation-
Here X = a is an ordinary point of the above equation if Note- If
Solution of the differential equation when x = 0 is an ordinary point, which means 1. Let 2. Find 3.
4. Substitute the expressions of y, 5. Calculate 6. Put the values of Example- Solve
Sol. Here we have-
Let the solution of the given differential equation be-
Since x = 0 is the ordinary point of the given equation-
Put these values in the given differential equation-
Equating the coefficients of various powers of x to zero, we get-
Therefore the solution is-
Example: Solve in series the equation-
Sol. Here we have-
Let us suppose-
Since x = 0 is the ordinary point of (1)- Then-
And
Put these values in equation (1)- We get-
Equating to zero the coefficients of the various powers of x, we get-
And so on…. In general we can write-
Now putting n = 5,
Put n = 6-
Put n = 7,
Put n = 8,
Put n = 9,
Put n = 10,
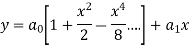
Put the above values in equation (1), we get-
Frobenius method- This method is also called generalized power series method. If x = 0 is a regular singularity of the equation.
Then the series solution is-
Which is called Frobenius series.
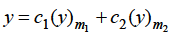
On equating the coefficient of lowest power of x in the identity to zero, we get a quadratic equation in ‘m’. We will get two values of m. The series solution of (1) will depend on the nature of the roots of the indicial equation- Case-1: when roots m1 and m2 are distinct and these are not differing by an integer- The complete solution in this case will be-
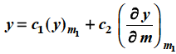
Case-2: when roots m1 and m2 are equal-
Case-3: when roots are distinct but differ by an integer-
Case-4: Roots are distinct and differing by an integer, making some coefficient indeterminate-
Example: Find solution in generalized series form about x = 0 of the differential equation
Sol. Here we have
Since x = 0 is a regular singular point, we assume the solution in the form
So that
Substituting for y,
The coefficient of the lowest degree term = 0 in first summation only and equating it to zero. Then the indicial equation is
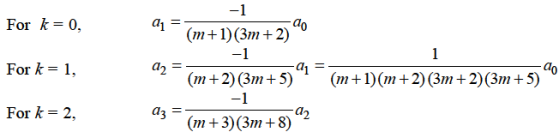
Since The coefficient of next lowest degree term k = 1 in first summation and k = 0 in the second summation and equating it to zero.
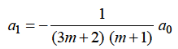
Equating to zero the coefficient of
Or
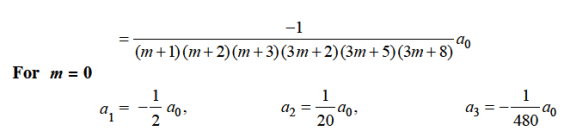
Which gives-
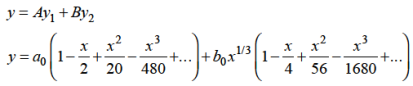
Hence for-
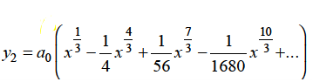
Form m = 1/3-
Hence for m = 1/3, the second solution will be-
The complete solution will be-
|














































Key takeaways-
If x = 0 is a regular singularity of the equation.
Then the series solution is-
2. when roots m1 and m2 are distinct and these are not differing by an integer-
3. when roots m1 and m2 are equal-
4. when roots are distinct but differ by an integer-
5. Roots are distinct and differing by an integer, making some coefficient indeterminate-
|


References
- E. Kreyszig, “Advanced Engineering Mathematics”, John Wiley & Sons, 2006.
- P. G. Hoel, S. C. Port And C. J. Stone, “Introduction To Probability Theory”, Universal Book Stall, 2003.
- S. Ross, “A First Course in Probability”, Pearson Education India, 2002.
- W. Feller, “An Introduction To Probability Theory and Its Applications”, Vol. 1, Wiley, 1968.
- N.P. Bali and M. Goyal, “A Text Book of Engineering Mathematics”, Laxmi Publications, 2010.
- B.S. Grewal, “Higher Engineering Mathematics”, Khanna Publishers, 2000.
- T. Veerarajan, “Engineering Mathematics”, Tata Mcgraw-Hill, New Delhi, 2010
- Higher engineering mathematics, HK Dass




