Unit - 3
Modern Field Survey Systems
EDM is electronic distance measurement survey which is used to find the distance of two point or object. This technique provides precise and more faster surveying than the old and conventional instruments that are used earlier. In old and conventional surveying, in linear measurement, chain and tape are used while in angular measurements compass are used, Dumpy level and a leveling staff are used in work of leveling. With this instrument, survey work become tedious
Hence in this case, the modern surveying instruments are used and this technique are replacing the old surveying instruments such as Dumpy level, chain, tape and compass. With the help of this modern techniques, survey work will be more, faster and precise.
Electronic distance measurement is the way of finding the length between two points by using electronic energy waves by taking the time and velocity.
planks give the principle in which electromagnetic radiation travel with speed of light and time travel by waves can be noted which colloids with target .and hence distance can be finding out by the below given formula: -
distance = velocity of light X travel time
Distance measurement in EDM and in modern surveying are done electronically. Distance is taken as the function of the speed of light, elapsed time and frequency of electromagnetic.
Frequency occur in electronic distance measuring device (EDM) can be used to find the elapsed travel time of its signal, because the signal reflects or bounce off a reflector and returns to origin point where it started.
EDM needs one oscillator at the origin, as the electromagnetic wave travels to a retro prism and reflected back to its origin. Both transmitter and the receiver of the signal are used. the instrument can take half the time elapsed between the moment of transmission and the moment of reception, multiply by the speed of light, it gives the distance between the object and origin point.
The elements for the calculation of the distance measured by an EDM, then take
ρ are the time elapsed between transmission and reception of the signal, Δt, and the speed of light, c.
Distance = ρ, Elapsed Time = Δt, Rate = c
Distance = Elapsed Time x Rate
The following are the instrument which are used in EDM as carrier wave: -
1. Microwave Instruments:
Microwaves are used in this instrument. In 1950 in South Africa by Dr. T.L. Wadley and named later as Tellurometers. The range of these instruments is up to 100 km. 12 to 24 V batteries are required in this instrument, That’s why light and portable. This instrument can be used in both day and night time.
It consists of two identical units.
pressing a button in instrument, master unit can be converted into a remote unit and vice versa. It requires two skilled persons to operate.
2. Infrared Wave Instruments:
These instruments are useful for the most of the civil works. In this instrument amplitude modulated infrared waves are used. The range of these instruments is up to 3 km. Prism reflectors is used at the end to find the line to be measured.
accuracy up to ± 10 mm is achieved in this instrument. These instruments are economical and can be mounted on theodolite
DISTOMAT DI 1000 and DISTOMAT DI 55 are the name of instrument used as infrared wave instrument.
Distomats are latest in the field of the EDM instruments. These instruments measure distances by using amplitude as it works on the same principle of infrared wave instrument The Diatomite is a very small in size and very compact and mainly use in the construction and engineering works.
It measures distances up to and smaller than 500 meters by simply pointing the instrument to a reflector.
3. Visible Light Wave Instruments:
This was first developed in Sweden and was named as Geodimeter.
in day its range is up to 3 km and in night its range is up to 2.5 km. Accuracy of these varies from 0.5 mm to 5 mm/km distance in this instrument. These instruments use the propagation of modulated light waves. These instruments are also very useful and popular in civil works.
A total station is an electronic/optical instrument used in modern surveying and building construction that uses electronic transit theodolite in conjunction with electronic distance meter (EDM). It is also integrated with microprocessor, electronic data collector and storage system.
The instrument is used to measure sloping distance of object to the instrument, horizontal angles and vertical angles. This Microprocessor unit enables for computation of data collected to further calculate the horizontal distance, coordinates of a point and reduced level of point.
Data collected from total station can be downloaded into computer/laptops for further processing of information.
Total stations are mainly used by land surveyors and civil engineers, either to record features as in topographic surveying or to set oust features (such as roads, houses or boundaries). They are also used by archaeologists to record excavations and by police, crime scene investigators, private accident Reconstructionist and insurance companies to take measurements of scenes.
Uses of Total Station: -
Total Station are use in following areas: -
There are mainly four main components which are
Accessories of total station are as follows: -
Advantages:
Applications:
The following application of total station are as given below: -
Basic Steps involved in Total station surveying
Step-1: Setting up the of the instrument along with the tripod
Step-2: Levelling of the instrument approximately with the help of “bull’s eye bubble” and then verifying the levelling electronically
Step-3: Adjustment of reticule focus and image.
Step-4: Recording all the measurements
Step-5: Data Processing
Step 1: Tripod Setup Tripod legs should be equally spacedTripod head should be approximately levelHead should be directly over survey point
Step 2: Mount Instrument on TripodPlace Instrument on Tripod Secure with cantering screw while bracing the instrument with the other hand Insert battery in instrument before leveling
Step 3: Focus on Survey PointFocus the optical plummet on the survey point
Step 4: Leveling the InstrumentAdjust the leveling foot screws to center the survey points in the optical plummet reticule Center the bubble in the circular level by adjusting the tripod legs
Step 4: Leveling ... Loosen the horizontal clamp and turn instrument until plate level is parallel to 2 of the leveling foot screws Center the bubble using the leveling screws- the bubble moves toward the screw that is turned clockwiseRotate the instrument 90 degrees and level using the 3rd leveling screw
Step 4: Leveling ... Observe the survey point in the optical plummet and center the point by loosening the cantering screw and sliding the entire instrumentAfter re-tightening the cantering screw check to make sure the plate level bubble is level in several directions
Step 5: Turn on the instrument by pressing and holding the “on” button the opening screen will be the “MEAS” screen. Select the Tilt function and then adjust the foot level screws to exactly center the electronic “bubble
1 CALIBRATION OF TOTAL STATIONS
Maintaining the high level of accuracy offered by modern total stations, there is much more emphasis on monitoring instrumental errors, and some construction sites require all instruments to be checked regularly using procedures outlined in the quality manuals.
Some instrumental errors can be eliminated by observing on two faces of the total station and averaging, but because one face measurements is the preferred method on site, it is important to determine the amount of instrumental errors and correct for them.
For total stations, instrumental errors are measured and corrected by electronic calibration procedures that are carried out at any time and are applied to the instrument on site.
Since calibration parameters can change due to mechanical shock, temperature changes and rough handling of high-precision instrument, an electronic calibration should be carried out on a total station as follows:
Before every calibration, it is essential to allow the total station enough to reach the ambient temperature.
2 HORIZONTAL COLLIMATIONS (OR LINE OF SIGHT ERROR)
This axial error happens when the line of sight is not perpendicular to the tilting axis. It affects all horizontal circle readings and increases parallel to steep sightings, but this is eliminated by observing on two faces. For single face measurements, an on-board calibration function is used to determine c, the deviation between the actual line of sight and a line perpendicular to the tilting axis. A correction will be applied automatically for this to all horizontal circle readings.

3 TILTING AXIS ERROR
Axial errors occur when the titling axis of the total station is not perpendicular to its vertical axis, this has no effect on sightings taken when the telescope is horizontal, but produces errors into horizontal circle readings when the telescope is tilted, especially for steep sightings.
But with horizontal collimation error, this error is erased by two face measurements, or the tilting axis error (a) is measured in a calibration procedure and a correction applied for this to all horizontal circle readings.
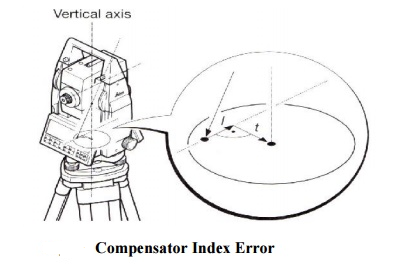
4 COMPENSATOR INDEX ERROR
Errors that were caused by not levelling a theodolite or total station carefully cannot be eliminated by taking face left and face right readings. If the total station is fitted with a compensator, it will measure residual tilts of the instrument and will apply corrections to the horizontal and vertical angles for these.
All compensators will have a longitudinal error l and traverse error t known as zero-point errors which are averaged using face left and face right readings but for single face readings must be determined by the calibration function of the total station.
A vertical collimation error exists on a total station if the 0o to 180o line in the vertical circle does not coincide with its vertical axis and this zero-point error is present in all vertical circle readings and like the horizontal collimation error, it is eliminated by taking FL and FR readings or by determining i
Any difference between the measured horizontal and vertical angles is then identified as an instrumental error and applied to all readings. The total station is thus calibrated and the procedure is the same for all of the error type.

3.11 GPS (Global Positioning System)
GPS is a navigation system using satellites, a receiver and algorithms to synchronize location, velocity and time data for air, sea and land travel.
GPS Satellite Constellation
The satellite constellation consists of 24-satellite constellation. The satellites are placed in six Earth cantered orbital planes with four satellites in each plane. The nominal orbital period of a GPS satellite is one-half of a side real day. The orbits are circular and equally spaced about the equator at a 60°separation with an inclination relative to the equator of nominally 55°. The orbital radius (i.e., nominal distance from the center of mass of the Earth to the satellite) is approximately 26,600km. This satellite constellation gives a 24-hr global user navigation and time determination capability. Similarly, for the Earth’s equator, it is like a ring that has been opened and laid on a flat surface. The slope of every orbit represents its inclination with respect to the Earth’s equatorial plane, which is nominally 55°. The orbital plane locations with respect to the Earth are defined by the longitude of the ascending node whereas the location of the satellite within the orbital plane is defined by the mean anomaly. The longitude of the ascending node is point of intersection of each orbital plane with the equatorial plane. The Greenwich meridian is the reference point where the longitude of the ascending node has value of zero. Several different notations are used to refer to the satellites in their orbits.
GPS Accessories:
GPS is made up of three different components, called as segments:
The three segments of GPS are:
Operational Control Segment (OCS)
The OCS maintains the satellites and their proper functioning. This includes maintaining the satellites in its proper orbital positions called station keeping and monitoring satellite subsystem health and status. The OCS also monitors the satellite solar arrays, battery power levels, and propellant levels used for manoeuvres and activates spare satellites if available.
The OCS updates each satellite’s clock, ephemeris, and almanac and other indicators in the navigation message once per day or as required. The ephemeris parameters are an accurate fit to the GPS satellite orbits and are valid only for a time interval from four to six hours depending on the time from the last control segment upload based on the once per day. Depending on the satellite version, the navigation message data can be stored or a minimum 14 days to a maximum of 210 days duration in intervals of four to six hours. The almanac consists of 7 of the 15 ephemeris orbital parameters.
Almanac data is required to predict the approximate satellite position and aid in satellite signal acquisition. The OCS resolves satellite anomalies, controls SA and AS and makes pseudo range and delta range measurements at the remote monitor stations to determine satellite clock corrections, almanac, and ephemeris. To acquire the above functions, the control segment is comprised of three different physical components: the master control station (MCS), monitor stations, and the ground antennas.
OCS Operations
The MCS is the center of the control segment operations and is found at Falcon Air Force Base, Colorado Springs, CO. The monitor stations inactively track the GPS satellites as they pass overhead by making pseudo range and delta range measurements. These measurements are made using both the L1 and L2 GPS satellite downlink frequencies. This raw data and the received navigation message with local weather is transmitted to the MCS through the Défense Satellite Communications System and other ground communications systems.
The MCS processes data from the monitor stations for satellite navigation payload control. Data from all the monitor stations is used to form satellite clock corrections, ephemeris and almanac data for every satellite. The MCS also monitors the status of satellites and ground stations. Satellite processor diagnostics can be requested and the satellite clock can be updated. A backup master control station is located at Gaithersburg, MD. This backup MCS is a temporary contractor facility.
Selective availability
GPS was originally designed so that real-time autonomous positioning and navigation with the civilian C/A code receivers would be less accurate than military P-code receivers. but the obtained accuracy was almost the same from both receivers. To ensure national security, the U.S. DoD implemented the so-called selective availability (SA) on Block II GPS satellites to deny precise real-time autonomous positioning to unauthorized users. SA was officially activated on March 25, 1990.
SA has two types of errors, the first one, called delta error, results from dithering the satellite clock, and is same to all users worldwide. The second one, called epsilon error, is an additional slowly varying orbital error. With SA turned on, nominal horizontal and vertical errors can be up to 100m and 156m, respectively, at the 95% probability level.
Satellite and receiver clock errors
Each GPS Block II and Block IIA satellite contains four atomic clocks, two caesium and two rubidium. The newer generation Block IIR satellites carry rubidium clocks only. One of the onboard clocks, a caesium for Block II and IIA, is selected to provide the frequency and the timing requirements for generating the GPS signals.
The GPS satellite clocks, although highly precise, are not perfect. Their stability is about 1 to 2 parts in 1013 over a period of one day. This means that the satellite clock error is 8.64 to 17.28 ns per day. The corresponding range error is 2.59m to 5.18m, which can be calculated by multiplying the clock error by the speed of light (i.e., 299,729,458 m/s). Caesium clocks tend to behave better over a longer period of time as compared to rubidium clocks. In fact, the stability of the caesium clocks over a period of 10 days or more improves to several parts in 1014.
Satellite clock errors introduces additional errors to the GPS measurements. These errors are common to all users observing the same satellite and can be eliminated through differencing between the receivers. Applying the satellite clock correction in the navigation message can also rectify the satellite clock errors which leaves an error of the order of several nanoseconds and translates to a range error of a few meters.
GPS receivers uses inexpensive crystal clocks, which are much less precise than the satellite clocks. The receiver clock error is much larger than that of the GPS satellite clock. It can be removed through differencing between the satellites or it can be treated as an additional unknown parameter in the estimation process. Precise external clocks are used in some applications in place of the internal receiver clock. The external atomic clocks have superior performance compared with the internal receiver clocks, they cost between a few thousand dollars for the rubidium clocks to about $20,000 for the caesium clocks.
1-Way GPS Measurements: -
For frequency measurements, frequency output from GPSDO is used as input to a phase comparator, or used as the external time base for counting of freq
Multipath error
Multipath is an error source for both the carrier-phase and pseu-dorange measurements. Multipath error occurs if the GPS signal arrives at the receiver antenna through different paths. These paths can be the direct line of sight signal and reflected signals from objects surrounding the receiver antenna.
Multipath distorts the original signal by interference with the reflected signals at the GPS antenna. It affects both the carrier phase and pseudo range measurements whereas its size is much larger in the pseu-dorange measurements. The size of the carrier phase multipath can reach a top value of a quarter of a cycle (about 4.8 cm for the L1 carrier phase). The pseudo range multipath can theoretically reach several tens of meters for the C/A-code measurements. However, with new advances in receiver technology, actual pseudo range multipath is decreased dramatically.
GPS ephemeris errors
Satellite positions as a function of time, which were included in the broadcast satellite navigation message and are predicted from previous GPS observations at the ground control stations. Overlapping 4-hour GPS data spans are used by the operational control system to predict fresh satellite orbital elements for each 1-hour period. Modelling the forces acting on the GPS satellites will not be perfect, which causes some errors in the estimated satellite positions, known as ephemeris errors. An ephemeris error is usually in the order of 2m to 5m, and can reach up to 50m under selective availability. The range error due to the combined effect of the ephemeris and the satellite clock errors is of the order of 2.
Ephemeris error for a particular satellite is identical to all GPS users worldwide. However, as different users see the same satellite at different view angles, the effect of the ephemeris error on the range measurement, and consequently on the calculated position, is different. This means that combining the measurements of two receivers and tracking a particular satellite cannot totally remove the ephemeris error. For relative positioning, the following rule of thumb gives a rough estimate of the effect of the ephemeris error on the baseline solution: the baseline error / the baseline length = the satellite position error / the range satellite. This means that if the satellite position error is 5m and the baseline length is 10 km, then the expected baseline line error due to ephemeris error is approximately 2.5 mm.
Applications, such as studies of the crystal dynamics of the earth, require more accurate ephemeris data than the broadcast ephemeris
Coordinate transformation is a normal operation in the development of spatial data for GIS. A coordinate transformation brings spatial data into an Earth based map coordinate system so that each data layer merges with every other data layer. This alignment promises features fall in their proper relative position when digital data from different layers are merged. Within the limits of data accuracy, a good transformation helps avoid inconsistent spatial relationships like farm fields on freeways, roads under water, or cities in the middle of swamps, except where these truly are. Coordinate transformation is also called as registration, because it “registers” the layers to a map coordinate system. Coordinate transformation is most commonly applied to convert newly digitized data from the digitizer/scanner coordinate system to a standard map coordinate system.
The input coordinate system depends on the digitizer or scanner-assigned values. An image may be scanned and coordinates recorded as a cursor is moved across the image surface. These coordinates are usually recorded in pixel, inch, or cm units respects to an origin located near the lower left corner of the image.
The absolute values of the coordinates depend on where the image happened to be placed on the table prior to scanning, but the relative position of digitized points does not vary.
Some factors that can hinder GPS accuracy include: -
Factors affecting accuracy
A basic understanding of how GNSS works, this section defines some of the key issues effecting the accuracy of GNSS fixes. These include:
How accurate is GPS?
GPS satellites broadcast their signals in space with a certain precision, but what we receive depends on additional factors, including satellite geometry, signal blockage, atmospheric conditions, and receiver design features/quality.
For example, GPS-enabled smart phones are typically accurate to within a 4.9 m (16 ft.) radius under open sky but their accuracy weakens near buildings, bridges, and trees.
High-end users boost GPS accuracy with dual-frequency receivers’ systems which can enable real-time positioning within a few cm, and long-term measurements at the mm level.
References:
1 Madhu, N, Sathikumar, R and Satheesh Gobi, Advanced Surveying: Total Station, GIS and Remote
Sensing, Pearson India, 2006.
2 Manoj, K. Arora and Badjatia, Geomatics Engineering, Nem Chand & Bros, 2011
3 Bhavikatti, S.S., Surveying and Levelling, Vol. I and II, I.K. International, 2010 4 Chandra, A.M., Higher
Surveying, Third Edition, New Age International (P) Limited, 2002.
5 Anji Reddy, M., Remote sensing and Geographical information system, B.S.
Publications, 2001.
6 Arora, K.R., Surveying, Vol-I, II and III, Standard Book House, 2015.




