UNIT 1
INTRODUCTION TO VECTORS AND TENSORS AND COORDINATED SYSTEM
Vectors
The concept of the vector is used to describe physical quantities which have both a magnitude and a direction associated with them. Examples are force, velocity,
Displacement and acceleration.
Geometrically, a vector is represented by an arrow; the arrow defines the direction of the vector and the magnitude of the vector is represented by the length of the arrow, Fig.1.1, a
Analytically, vectors will be represented by lowercase bold-face Latin letters, e.g. a, r, q. The magnitude (or length) of a vector is denoted by lal or a. It is a scalar and must be non-negative. Any vector whose length is 1 is called a unit vector; unit vectors will usually be denoted by e.
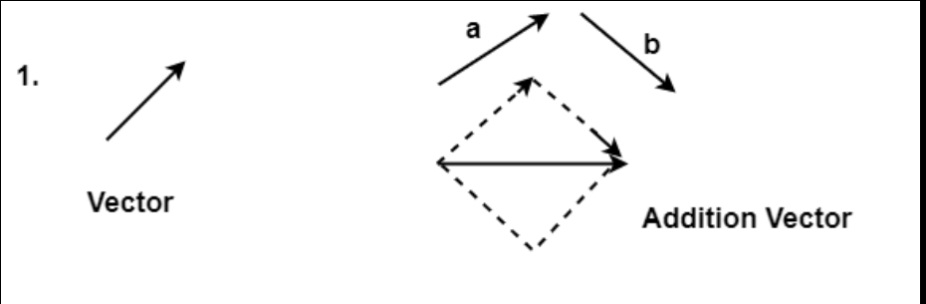
Figure 1.1: (a) a vector; (b) addition of vectors
Tensors
Here the concept of the tensor is introduced. Tensors can be of different orders – zeroth order tensors, first-order tensors, second-order tensors, and so on. Apart from the zeroth and first order tensors (see below), the second-order tensors are the most important tensors from a practical point of view, being important quantities in, amongst other topics, continuum mechanics, relativity, electromagnetism and quantum theory.
Zeroth and First Order Tensors
A tensor of order zero is simply another name for a scalar α.
A first-order tensor is simply another name for a vector u.
Second Order Tensors
Notation
Vectors: lowercase bold-face Latin letters, e.g. a, r, q
2nd order Tensors: uppercase bold-face Latin letters, e.g. F, T, S
Tensors as Linear Operators
A second-order tensor T may be defined as an operator that acts on a vector u generating another vector v, so that T (u) = v, or
T.u = v or Tu = v (Second-order Tensor)
The second-order tensor T is a linear operator (or linear transformation), which
Means that
T (a + b) = Ta + Tb … distributive
T (αa) = α (Ta) … associative
This linearity can be viewed geometrically as in Fig.1.b
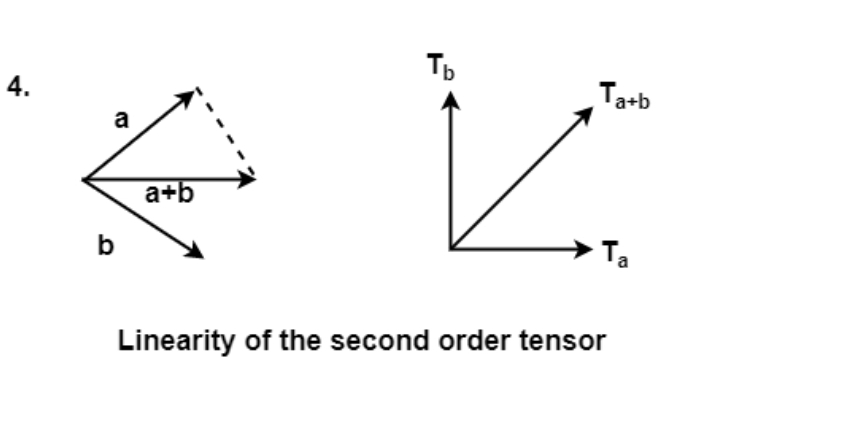
Figure 1.1.b: Linearity of the second order tensor
Further, two tensors T and S are said to be equal if and only if Sv = Tv for all vectors v.
Example (of a Tensor)
Suppose that F is an operator which transforms every vector into its mirror-image with respect to a given plane, Fig. 1.1.c. Transforms a vector into another vector and the transformation is linear, as can be seen geometrically from the figure. Thus F is a second-order tensor.
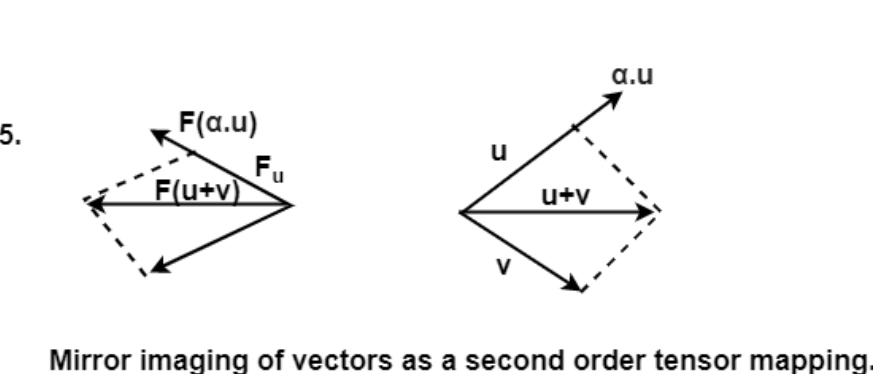
Figure 1.1.c: Mirror-imaging of vectors as a second order tensor mapping
Vector Algebra
The operations of addition, subtraction and multiplication familiar in the algebra of numbers (or scalars) can be extended to an algebra of vectors.
The following definitions and properties fundamentally define the vector:
1. Sum of Vectors:
The addition of vectors a and b is a vector c formed by placing the initial point of
b on the terminal point of a and then joining the initial point of a to the terminal point of b. The sum is written c = a + b. This definition is called the parallelogram law for vector addition because, in a geometrical interpretation of vector addition, c is the diagonal of a parallelogram formed by the two vectors a and b, Fig. 1.1.1b. The following properties hold for vector addition:
a + b = b + a … commutative law
a + (b + c) = (a + b) + c … associative law
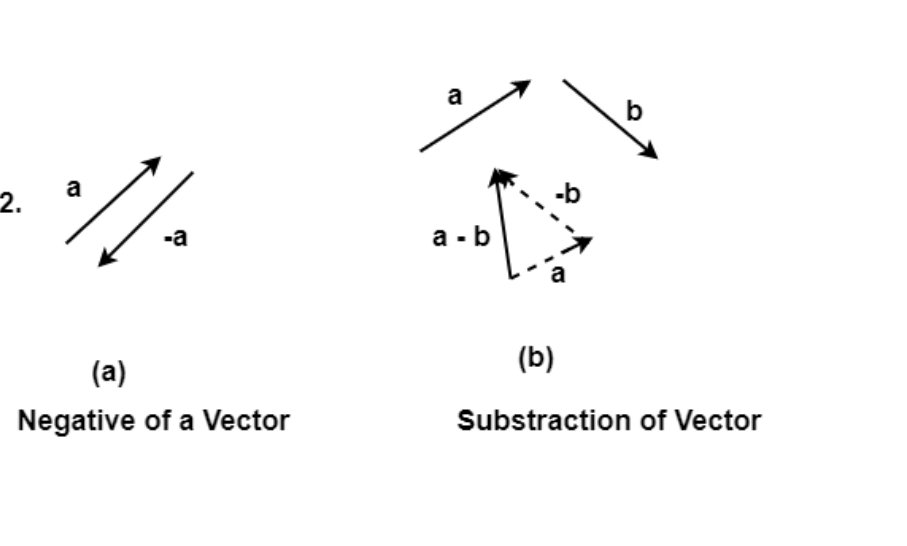
2. The Negative Vector:
For each vector a there exists a negative vector. This vector has direction
Opposite to that of vector a but has the same magnitude; it is denoted by –a.
A Geometrical interpretation of the negative vector is shown in Fig. 2.a.
3. Subtraction of Vectors and the Zero Vectors:
The subtraction of two vectors a and b is defined by a- b = a +(-b), Fig. 2.b. If a = b then a - b is defined as the zero vector (or null vector) and is represented by the symbol o. It has zero magnitude and unspecified direction. A proper vector is any vector other than the null vector. Thus the following properties hold:
a + 0= a
a + (-a) =0
4. Scalar Multiplication:
The product of a vector a by a scalar α is a vector αa with magnitude α times the magnitude of a and with direction the same as or opposite to that of a, according as α is positive or negative. If α= 0 αa is the null vector. The following properties hold for scalar multiplication:
(α + β) a = αa+ βa … distributive law, over addition of scalars
α (a+ b) = (αa + αb) … distributive law, over addition of vectors
α (β a) = α β a … associative law for scalar multiplication
Note that when two vectors a and b are equal, they have the same direction and
Magnitude, regardless of the position of their initial points. Thus a = b in Fig. 1.1.3. A particular position in space is not assigned here to a vector – it just has a magnitude and a direction. Such vectors are called free, to distinguish them from certain special vectors to which a particular position in space is actually assigned.
The vector as something with “magnitude and direction” and defined by the above rules is an element of one case of the mathematical structure, the vector space
Tensors algebra
A second rank tensor is a finite sum of ordered vector pairs A = a ⊗b +···+c ⊗d. One ordered pair of vectors is called the dyad (Wilson 1901). The symbol ⊗ is called the dyadic (tensor) product of two vectors. A single dyad or a sum of two dyads is special cases of the second rank tensor. Any finite sum of more than three dyads can be reduced to a sum of three dyads. For example, let
A = ∑ ni=1 = a (i) ⊗ b(i)
Be a second rank tensor. Introducing a basis ek the vectors a(i) can be represented by a(i) = aek where ak (i) are coordinates of the vectors a(i). Now we may write
A = ∑ni=1 ak(i) ek ⊗ b (i)
= ek ⊗ ∑n i=1ak(i) b (i)
= ek ⊗ dk
Dk ≡ ∑n i=1ak(i) b(i)
Addition
The sum of two tensors is defined as the sum of the corresponding dyads. The sum has the properties of associativity and commutatively. In addition, the following operation can be introduced
a ⊗ (b + c) = a ⊗ b + a ⊗ c,
(a + b) ⊗ c = a ⊗ c + b ⊗ c
Multiplication by a Scalar
This operation is introduced first for one dyad. For any scalar α and any dyad
a ⊗ b
α (a ⊗ b) = (αa) ⊗ b = a ⊗ (αb),
(α + β) a ⊗ b = αa ⊗ b + βa ⊗ b (eqn 1)
By setting α = 0 in the first equation of (eqn 1) the zero dyad can be defined, i.e. 0(a ⊗ b) = 0 ⊗ b = a ⊗ 0. The above operations can be generalized for any finite sum of dyads, i.e. for second rank tensors.
Inner Dot Product
For any two second rank tensors A and B the inner dot product is specified by A · B. The rule and the result of this operation can be explained in the special case of two dyads, i.e. by setting A = a ⊗ b and B = c ⊗ d
A · B = a ⊗ b · c ⊗ d = (b · c) a ⊗ d = αa ⊗ d, α ≡ b · c
Note that in general A · B = B · A. This can be again verified for two dyads. The operation can be generalized for two second rank tensors as follows
A · B = ∑3i=1 a (i) ⊗ b (i) ·∑3k=1 c (k) ⊗ d (k)
= ∑3i=1 ∑3k=1 (b (i) · c (k)) a (i) ⊗ d (k) = ∑3i=1 ∑3k=1 α (ik) a (i) ⊗ d (k)
With α (ik) ≡ b (i) · c (k). The result of this operation is a second rank tensor.
Symmetric Tensors
A second rank tensor is said to be symmetric if it satisfies the following equality
A = AT
An alternative definition of the symmetric tensor can be given as follows. A second rank tensor is said to be symmetric if for any vector c = 0 the following equality is valid
c · A = A · c
An important example of a symmetric tensor is the unit or identity tensor I, which is defined by such a way that for any vector c
c · I = I · c = c
The representations of the identity tensor are
I = ek ⊗ ek = ek ⊗ ek
For any basis ek and ek, ek · em = δm k. For three orthonormal vectors m, n and p the identity tensor has the form
I = n ⊗ n + m ⊗ m + p ⊗ p
A symmetric second rank tensor P satisfying the condition P · P = P is called projector. Examples of projectors are
m ⊗ m, n ⊗ n + p ⊗ p = I − m ⊗ m,
Where m, n and p are orthonormal vectors. The result of the dot product of the tensor m ⊗ m with any vector a is the projection of the vector a onto the line spanned on the vector m,
i.e. m ⊗ m · a = (a · m)m. The result of (n ⊗ n + p ⊗ p) · a is the projection of the vector a onto the plane spanned on the vectors n and p.
Skew-Symmetric Tensors
A second rank tensor is said to be skew-symmetric if it satisfies the following equality
A = −AT
Or if for any vector c does not equal to 0
c · A = −A · c
Any skew-symmetric tensor A can be represented by
A = a × I = I × a
The vector a is called the associated vector. Any second rank tensor can be uniquely decomposed into the symmetric and skew-symmetric parts
A = 1/ 2(A + AT) + 1/ 2 (A − AT) = A1 + A2,
A1 = 1/ 2(A + AT), A1 = AT 1
A2 = 1/2 (A − AT),
A2 = −AT 2
Consider a dot product of a second rank tensor A and a unit vector n. The resulting vector a = A · n differs in general from n both by the length and the direction. However, one can find those unit vectors n, for which A · n is collinear with n, i.e. only the length of n is changed. Such vectors can be found from the equation
A · n = λn or (A − λI) · n = 0 (x)
The unit vector n is called the principal vector (principal direction) and the scalar
λ the principal value of the tensor A. The problem to find the principal values and
Principal directions of Eq. (x) are the Eigen-value problem for A. The principal
Values are the Eigen-values the principal directions are the Eigen-directions.
Let A be a symmetric tensor. In this case the principal values are real numbers and there exist at least three mutually orthogonal principal vectors. The principal values can be found as roots of the characteristic polynomial
Det(A − λI) = −λ3 + J1(A)λ2 − J2(A)λ + J3(A) = 0 (y)
Here Ji(A)(i = 1, 2, 3) are the principal invariants of the tensor A
J1(A) = tr A,
J2(A) = ½ [(tr A)2 − tr A2],
J3(A) = det A = 1/6(tr A)3 – ½ tr A.tr A2 +1/3tr A3 (z)
The principal values are specified by λI, λI I, λIII . The following three cases can
Be introduced
• Three distinct values λi, i = I, II, III, i.e. λ does not equal to λ II does not equal to λIII, or
• One single value and one double solution, e.g. λI = λII does not equal to λIII, or
• One triple solution λI = λII = λIII
For a fixed solution λi, i = I, II, III the Eigen-directions can be found from
(A − λiI) · n(i) = 0 …(v)
The Eigen-direction is defined with respect to an arbitrary scalar multiplier. For known principal values and principal directions the second rank tensor can be represented as follows (spectral representation)
A = λIn I ⊗ nI + λI In II⊗ n II + λIIIn III ⊗ n III for λI does not equal to λII does not equal to λIII ,
A = λI (I − n III ⊗ n III) + λIIIn III ⊗ n III for λI = λII does not equal to λIII,
A = λI for λI = λII = λIII = λ




