Unit - 2
Z- Transforms
The Z transform for discrete time system x(n ) is defined as
X(z) =  ------- (1) where z is a complex variable.
------- (1) where z is a complex variable.
In polar form z can be expressed as
z = r e jw ---------------(2) where r is the radius of a circle.
For n≥ 0
X(z ) =  --------- (3)which is called one-sided z-transform.
--------- (3)which is called one-sided z-transform.
By substituting z = r e jw
X(r e jw) =  ------- (4)
------- (4)
 ----- (5)
----- (5)
Equation(5) represents the Fourier transform of the signal x(n) r-n
Hence the inverse DTFT X(r ejw) must be x(n) r-n.
x(n) r-n = 1/2π  r e jw) e jwndw
r e jw) e jwndw
On multiplying both sides by rn we get
x(n) = 1/ 2 π  r ejw) (r ejw )ndw [ z = r ejw
r ejw) (r ejw )ndw [ z = r ejw
Let z= r e jw anddw= dz/jz
Dz = r ejwdw
Dw = dz/jrejw
x[n] = 
Example
Find the z-transform for the sequence
x[n] = 2 δ[n]+ 3 δ[n-1]+ 5 δ[n-2]+ 2 δ[n-3]
Solution:
X(z) = 2 + 3 z-1 + 5 z -2 + 2 z -3
Example
If X(z)= 4 – 5 z-2 + z-3 – 2z -4 then find x[n]
Solution:
x[n] = 4 δ[n] - 5 δ[n-2] + δ[n-3] - 2 δ[n-4]
Key Takeaways:
The Z transform is the discrete time analog of the Laplace transform
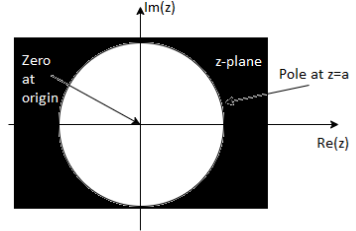
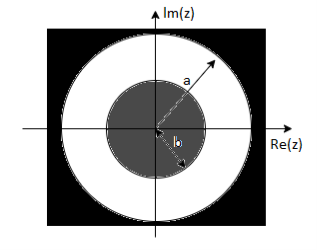
Properties of Region of Convergence
- The ROC is a ring or disk in z-plane centered at the origin.
- The ROC cannot contain any poles.
- If x(n) is finite duration casual sequence then the ROC is the entire z-plane except at z=0.
- If x(n) is a finite duration anti-casual sequence then the ROC is the entire z-plane except at z=∞.
- If x(n) is a finite duration two- sided sequence the ROC is entire z-plane except at z=0 and z=∞.
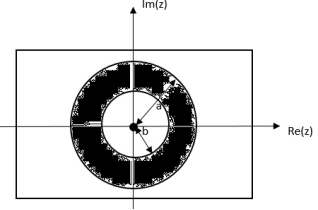
- If x(n) is infinite duration two- sided sequence ROC will consist of a ring in z-plane bounded on the interior and exterior by a pole not containing any poles.
- The ROC of an LTI stable system contains the unit circle
- ROC must be connected region.
Linearity
If X1(z) = Z{x1(n)} and X2(z) = Z{x2(n)}
Then
Z{ax1(n) + bx2(n)} = a X1(z) + b X2(z)
Proof:
Z{ax1(n) + b x2(n) }= 
= a  + b
+ b 
= a X1(z) + b X2(z)
Time Shifting
If X(z) = Z{x(n)} and initial conditions for x(n) are zero then
Z{x(n-m) } = z-m X(z)
Where m is a positive integer.
Proof:
Z {x(n-m)} =  x(n-m)z-n
x(n-m)z-n
Let n-m = p then n= p+m
Z{x(n-m)} =  x(p) z-(m+p)
x(p) z-(m+p)
z-m  x(p) z-p= z-m X(z)
x(p) z-p= z-m X(z)
Multiplication by exponential sequence
If X(z ) = Z{x(n)} then
Z [ an x(n) ] = X(a-1 z)
Proof:
Z{ an x(n) } =  x(n) an z-n
x(n) an z-n
=  x(n) (az-1)n
x(n) (az-1)n
= X(az-1)
Convolution
We know that
Z{x(n) * h(n) } = X(z) H(z)
Proof:
Let y(n) = x(n) * h(n)
y(n)=  x(k)h(n-k)
x(k)h(n-k)
Taking z-transform on both sides we obtain
Y(z) =  [
[ x(k)h(n-k)]z-nn
x(k)h(n-k)]z-nn
 x(n) z-k
x(n) z-k  h(n-k) z –(n-k) Replacing n-k by l
h(n-k) z –(n-k) Replacing n-k by l
 x(k) z-k
x(k) z-k  h(l) z-l
h(l) z-l
= X(k) Z(k)
Time Reversal
If X(z) = Z{x(n)} then
Z{x(-n)} = X(z-1}
Proof:
Z{x(-n)} =  h(l) ( z-l) -1 l=-n
h(l) ( z-l) -1 l=-n
= X(z-1)
Multiplication by n
If Z{x(n)} = X(z) then
Z{n x(n)} = -z d/dz X(z)
X(z) =  x[n]z-n
x[n]z-n
Z{n x(n)} =  nx[n]z-n
nx[n]z-n
= z x[n]z-n
x[n]z-n
=
= 
= 
= -z d/dz X(z)
Problems:
1. Find the z-transform of the sequence
x(n) = a n-1 u(n-1)
We know that x(n) = an u(n) is
X(z) = 1/1/az-1
By using time shifting property we have Z{ x(n-k)} = z-k X(z)
Therefore
Z{an-1 u(n-1)} = z-1/ 1-az-1 = 1/z-a. ROC |z| > |a|
2.Find the z-transform of the sequence
x(n) = an cos nπ/2
Z{ cos w0n} = 1- (cos w0) z-1/ 1 –(2 cos w0) z-1 + z-2
Since w0=π/2
Z{ cos π/2 n u(n)} = 1/1 + z-2
Using exponential sequence property
Z{ an x(n) } = X(a-1 z)
Z{ an cos nπ/2} = 1/1+(a-1z)-2 = 1/ 1 + a2/z2 = z2/ a2 + z2
3.Find the z transform of the sequence x(n) = n u(n)
The z-transform of unit step sequence is given by
Z{u(n)} = z/z-1
Z{ n u(n)} = -z d/dz (z/z-1)
= z/(z-1)2
4.If x(n) = x1(n) * x2(n) where x1(n) = (1/3)n u(n) and x2(n) = (1/5)n u(n). Find X(z) by using convolution property.
X1(z) = 1/ 1- (1/3)z-1 X2(z) = 1/1- (1/5) z-1
X(z) = 1/1-(1/3)z-1 . 1/1-(1/5) z-1
Using z-transform find the convolution of two sequences.
x1(n) = {1,2,-1,0,3} x2(n) = { 1,2,-1}
Z{ x1(n) * x2(n)} = X1(z) . X2(z)
X1(z) = 1 + 2z-1 – z-2 + 3 z-4
X2(z) = 1 + 2z-1 – z-2
(1 + 2z-1 – z-2 + 3 z-4 ) (1 + 2z-1 – z-2 )
= 1 + 4z-1 + 2z-2 – 4 z- 3 + 4 z-4 + 6 z- 5 – 3 z-6
5.Determine the z-transform of the signal
x(n ) = rn (sin w0n ) u(n)
Z{(sin w0n ) u(n)} = sin w0 z-1/ 1 -2 (cos w0) z-1 + z-2
Z{ an x(n)} = X(a-1 z)
Therefore
Z{ rn sin(w0n) u(n) } = (sin w0) (r-1 z)-1/ 1- 2 (cos w0)(r-1z)-1 + (r-1z)-2
= r(sinw0) z-1/ 1-2r(cos w0) z-1 + r2 z-2
6.Determine the signal x(n) whose z-transform is given by
X(z) = log(1- az-1).
X(z)= log(1-az-1)
Differentiating both sides we get
d/dz X(z) = 1/1-az-1 (a z-2) = az-2/1- az-1
-z d/dz{ X(z)} = -az-1/1-az-1
= -az-1[ 1/1-az-1]
= -a Z[ a n-1 u(n-1)] -------- (1)
From differentiation property
Z{ n x(n)} = -z d/dz [ X(z)] ------- (2)
Comparing (1) and (2) we get
n x(n) = -a [ a n-1 u(n-1)]
Or x(n) = -a [a n-1 u(n-1)]/n
7.Determine the z-transform of the signal
x(n) =1/2 (n2 + n) (1/3) n-1 u(n-1)
=½ n2 (1/3) n-1 u(n-1) +1/2 n (1/3) n-1 u(n-1)
We know that
Z[(1/3) n u(n)] = z/ z-1/3
Using time-shifting property
Z{(1/3) n-1 u(n-1)] = 1/ z- 1/3
Z [ n (1/3) n-1 u(n-1)] = -z d/dz [1/z-(1/3)]
=-z d/dz( 1/z-1/3)= -z [-1/(z-1/3) 2]= z/ (z-1/3)2
Z [ n2 (1/3) u(n-1)] = -z d/dz [ z/(z-1/3)2]
= z(z+1/3)/(z-1/3)2
= -z [ (z-1/3)2 -2z(z-1/3)/(z-1/3)4
= z(z+1/3)/(z-1/3)3
X(z) = ½[z(z+1/3)/(z-1/3)3 + z/ (z-1/3)2]
= z2/(z-1/3)3
8.Find the z-transform and ROC of the signal
x(n) = an u(n)
Solution:
X(z) = 
=  -----(1) u(n) = 0 for n<0
-----(1) u(n) = 0 for n<0
1 for n≥0
=  ------- (2)
------- (2)
=  ------- (3)
------- (3)
This is a geometric series of infinite length that is
a + ar + ar2 + ………….. ∞ = a /1-r if |r| <1
Then from equation (3) it converges when |az-1| < 1 or |z| >|a|
Therefore
X(z) = 1/ 1-az-1: ROC |z| > |a|
9.Find the z-transform of the signal x(n) =-b n u(-n-1). Find ROC
X(z) = = 
X(z) =  u(-n-1) =0 for n ≥0
u(-n-1) =0 for n ≥0
= 1 for n ≤ -1
=  =
=  =
=
= b-1z/1- b-1z = z/ z-b = 1/ 1-bz-1 |z| < |b|

10. Find the z-transform of x(n) = an u(n) – bn u(-n-1)
X(z) = 
=  +
+  b-1
b-1
= z/z-a + z/z-b ROC |a| < |z| < |b|
|b|< |a|
|b| >|a|
11. Find the z-transform of x(n) = {1,2,3,2}
Givenx(0) = 1 x(1) =2 x(2) =3 x(3) = 2
X(z) = 
X(z) = 1+ 2z-1 + 3 z-2 +2 z-3
Key takeaway
Property | Time Domain | z-Domain | ROC |
Notation | x(n) | X(n) | ROC:r2<|z|<r1 |
| x1(n) x2(n) | X1(z) X2(n) | ROC1 ROC2 |
Linearity | a1x1(n) + a2x2(n) | a1X1(n) + a2X2(n) | At least ROC1 ∩ ROC2 |
Time shifting | x(n – k) | z-k X(z) | At least ROC, except z=0 if (k<0) and z = ∞ if (k<0) |
z-scaling | anx(n) | X(a-1z) | |a|r2<|z|<|a|r1 |
Time reversal | x(-n) | X(z-1) | 1/r1 < |z| < 1/r2 |
Conjugation | x*(n) | X*(Z*) | ROC |
z-differentiation | Nx(n) | -z dX(z)/dz | r2 < |z|<r1 |
Convolution | x1(n) * x2(n) | X1(z) X2(z) | At least ROC1 ∩ ROC2 |
Inverse Z transform using partial fraction and power series method
Formal inverse z-transform is based on a Cauchy integral
• Less formal ways sufficient most of the time – Inspection method – Partial fraction expansion – Power series expansion
• Inspection Method – Make use of known z-transform pairs such as
anu[n] 1/ (1-az-1) |z| > |a|
Power series method
The z-transform of the sequence x(n) is given by
X(z) = 
Gives the expansion in power series form. From power series we get the following sequence:
x(n) = {∙∙∙∙∙∙∙∙∙∙x(−2), x(−1), x(0), x(1), x(2), ∙∙∙∙∙∙∙∙∙∙∙}
It is possible to get the power series expansion directly or by long division. In power series expansion technique ROC has a vital role.
Partial fraction expansion method
Find the partial fraction method of

By solving A= 1 and B=-1
Therefore,
X(z) = 
x(n) = (1/2) n u(n) – (1/4) n u(n)
Find the partial fraction of
X(z) = 
X(z) = 



By taking inverse z-transform both sides we get
=(0.5 +j 0.288)((- 0.5 + j 0.866)n u(n)+(0.5 + j 0.288)((-0.5 – j 0.866)n u(n)
Solution of difference equations using Z transform
Z transform converts the difference into algebraic equation in z-domain.
Find the impulse response and step response for the following systems:
y(n) = - ¾ y(n-1) + 1/8 y(n-2) = x(n)
y(n) - ¾ y(n-1) + 1/8 y(n-2) = x(n)
Taking z-transform on both sides we get
Y(z) – ¾ [ z-1 Y(z) + y(-1) ] +1/8 [ z-2 Y(z) + z-1 y(-1)+y(-2)] = X(z)
Substituting y(-1)=y(-2)= 0
Y(z) -3/4 z-1 Y(z) + 1/8 z-2 Y(z) = X(z)
Y(z) = 
Impulse response
x(n) = δ(n) X(z) =1
Y(z) =  =
= 
By solving A=2 and B=-1.
Y(z) = 
y(n) = 2 (1/2)n u(n) – (1/4) n u(n).
Step Response
x(n) = u(n) X(z) = z/z-1


By solving A=8/3 B= -2 C= 1/3
Therefore
Y(z) = 
y(n) = 8/3 u(n) – 2(1/2)n u(n) +1/3 (1/4) n u(n)
Que) Find the inverse z-transform of X(z)=  . Using partial fraction method. ROC |z|>2?
. Using partial fraction method. ROC |z|>2?
Sol: X(z)= 
Dividing both sides by z
3=A(z-2)+Bz
Equating coefficients of z and z0 on both sides we get
A+B=0
-2A+B=3
Solving above two equations and we get A=-3/2 and B=3/2
X(z)= 
Taking inverse of above equation
X[n]=  δ(n)+
δ(n)+ (2)nu(n)
(2)nu(n)
Key takeaway
The methods used for finding inverse z-transform are partial fraction method and power series method.
Consider two periodic signals x1(t) and x2(t) with equal period T. If the Fourier series co-efficient of these two signals are cn and dn then
1/T  x2(t) = 1/T
x2(t) = 1/T  n e j n Ωot [
n e j n Ωot [  e jmΩot ] dt---------------------(1)
e jmΩot ] dt---------------------(1)
= 1/T  d *m
d *m  e j(n-m)Ωot dt ------------------------------(2)
e j(n-m)Ωot dt ------------------------------(2)
= 0 n≠ m
= 
 d *n n=m --------------------------------(3)
d *n n=m --------------------------------(3)
If x1(t) = x2(t) = x(t) then eq(3) becomes
1/T  |x(t)|2 =
|x(t)|2 =  --------------------------------(4)
--------------------------------(4)
The above equation can be written as

n≠0

n≠0
a0 2 +  [Re(c 2 n ) + Im (cn ) 2]
[Re(c 2 n ) + Im (cn ) 2]
= a0 2 +  n /2 + b 2 n /2 ---------------------------(5)
n /2 + b 2 n /2 ---------------------------(5)
Key Takeaway:
- Definition of Parsevals theorem
- Derivation of the theorem
- The Unilateral z-transform is also called as one-sided z- transform.
- It is defined for n>=0 i.e. Causal sequences.
- The unilateral z- transform is used to solve difference equations with initial conditions.
X(z) = 
- Unilateral and bilateral transforms are same for causal signals.
Properties of Unilateral Z transform
Time Shift
x(n) ⇌ X(z)
x(n-1) ⇌ z-k X(z) + z-k+1 x(-1)+ ---------------- + z-1x(-k+1) + x(-k)
x(n) ⇌ X(z)
x(n-1) ⇌ Y(z)
Y(z) = 
Let n – 1 = m
Y(z) = 
Y(z) = x(-1) + z-1 
x(n-1) ⇌ z-1 X(z) + x(-1)
x(n – 2) ⇌ z-2 X(z) + z-1x(-1) + x(-2)
Final Value Theorem
x(∞) = 
Final value and initial value theorems are valid only for causal and stable system.
x(n+1) ⇌ z X(z) – zx(0)
x(n) ⇌ X(z)
X(z) = 
Substracting these two equations


Taking the limit as z ⟶ 1


Let us expand the LHS os the above equation as 

x(∞) = 
Or

Initial Value Theorem
x(n) ⇌ X(z)
x(0) = 
X(z) = 
X(z) = x(0) + x(1)/z + x(2)/z2 + ...
References:
1. Digital signal processing- A practical approach Second Edition, 2002.E. C. Ifeachar, B. W. Jarvis PearsonEducation
2. Sanjit K. Mitra, ‘Digital Signal Processing – A Computer based approach’
3. S. Salivahanan, A Vallavaraj, C. Gnanapriya, ‘Digital Signal Processing’, 2nd Edition McGraw Hill.
4. A. Nagoor Kani, ‘Digital Signal Processing’, 2nd Edition McGraw Hill.
5.P. Ramesh Babu, ‘Digital Signal Processing’ Scitech




