Unit - 2
Linear Applications of IC Op-Amps
A voltage to current converter or V to I converter, is an electronic circuit that takes current as the input and produces voltage as the output.
An op-amp based voltage to current converter produces an output current when a voltage is applied to its non-inverting terminal. The circuit diagram of an op-amp based voltage to current converter is shown in the following figure.
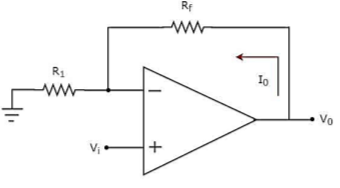
Fig 1 V-I Converter
In the circuit shown above, an input voltage Vi is applied at the non-inverting input terminal of the op-amp.
According to the virtual short concept, the voltage at the inverting input terminal of an op-amp will be equal to the voltage at its non-inverting input terminal.
So, the voltage at the inverting input terminal of the op-amp will be Vi.
The nodal equation at the inverting input terminal's node is −
ViR1−I0=0
=>I0=VtR1
Thus, the output current I0 of a voltage to current converter is the ratio of its input voltage Vi and resistance R1.
We can re-write the above equation as −
I0/Vi=1/R1
The above equation represents the ratio of the output current I0 and the input voltage Vi & it is equal to the reciprocal of resistance R1. The ratio of the output current I0 and the input voltage Vi is called as Transconductance.
Current to voltage converter
A current to voltage converter or I to V converter is an electronic circuit that takes current as the input and produces voltage as the output.
An op-amp based current to voltage converter produces an output voltage when current is applied to its inverting terminal. The circuit diagram of an op-amp based current to voltage converter is shown in the following figure.
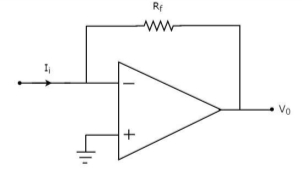
Fig 2 I-V Converter
In the circuit shown above, the non-inverting input terminal of the op-amp is connected to ground. That means zero volts is applied at its non-inverting input terminal.
According to the virtual short concept, the voltage at the inverting input terminal of an op-amp will be equal to the voltage at its non-inverting input terminal. So, the voltage at the inverting input terminal of the op-amp will be zero volts.
The nodal equation at the inverting terminal's node is −
−Ii+0−V0/Rf=0
−Ii=V0/Rf
V0=−Rf.Ii
Thus, the output voltage, V0 of current to voltage converter is the (negative) product of the feedback resistance, Rf and the input current, It. Observe that the output voltage, V0 is having a negative sign, which indicates that there exists a 1800 phase difference between the input current and output voltage.
We can re-write the above equation as –
V0/Ii=−Rf
The above equation represents the ratio of the output voltage V0 and the input current Ii, and it is equal to the negative of feedback resistance, Rf. The ratio of output voltage V0 and input current Ii is called as Trans-resistance.
Key takeaways
A voltage to current converter or V to I converter, is an electronic circuit that takes current as the input and produces voltage as the output.
An op-amp based voltage to current converter produces an output current when a voltage is applied to its non-inverting terminal.
A current to voltage converter or I to V converter is an electronic circuit that takes current as the input and produces voltage as the output.
An op-amp based current to voltage converter produces an output voltage when current is applied to its inverting terminal.
The Instrumentation amplifiers consist of three op-amps. In this circuit, a non-inverting amplifier is connected to each input of the differential amplifier.
This instrumentation amplifier provides high input impedance for exact measurement of input data from transducers. The circuit diagram of an instrumentation amplifier is as shown in the figure below.
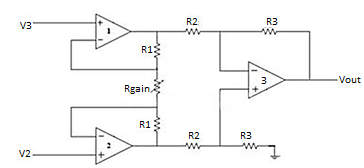
Fig 3 Instrumentation Amplifier
The op-amps 1 & 2 are non-inverting amplifiers and together form an input stage of the instrumentation amplifier. The op-amp 3 is a difference amplifier that forms the output stage of the instrumentation amplifier.
Working
The output stage of the instrumentation amplifier is a difference amplifier, whose output Vout is the amplified difference of the input signals applied to its input terminals.
If the outputs of op-amp 1 and op-amp 2 are Vo1 and Vo2 respectively, then the output of the difference amplifier is given by,
Vout = (R3/R2)(Vo1-Vo2)
The expressions for Vo1 and Vo2 can be found in terms of the input voltages and resistances.
Consider the input stage of the instrumentation amplifier as shown in the figure below.
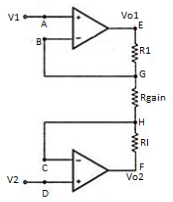
Fig 4 Input Stage of Instrumentation Amplifier
The potential at node A is the input voltage V1. Hence the potential at node B is also V1, from the virtual short concept. Thus, the potential at node G is also V1.
The potential at node D is the input voltage V2. Hence the potential at node C is also V2, from the virtual short. Thus, the potential at node H is also V2.
Ideally the current to the input stage op-amps is zero. Therefore, the current I through the resistors R1, Rgain and R1 remains the same.
Applying Ohm’s law between the nodes E and F,
I = (Vo1-Vo2)/(R1+Rgain+R1) ——————— 1
I = (Vo1-Vo2)/(2R1+Rgain)
Since no current is flowing to the input of the op-amps 1 & 2, the current I between the nodes G and H can be given as,
I = (VG-VH)/Rgain = (V1-V2)/Rgain ————————- 2
Equating equations 1 and 2,
(Vo1-Vo2)/(2R1+Rgain) = (V1-V2)/Rgain
(Vo1-Vo2) = (2R1+Rgain)(V1-V2)/Rgain —————— 3
The output of the difference amplifier is given as,
Vout = (R3/R2) (Vo1-Vo2)
Therefore, (Vo1 – Vo2) = (R2/R3)Vout
Substituting (Vo1 – Vo2) value in the equation 3, we get
(R2/R3)Vout = (2R1+Rgain)(V1-V2)/Rgain
i.e. Vout = (R3/R2){(2R1+Rgain)/Rgain}(V1-V2)
The above equation gives the output voltage of an instrumentation amplifier. The overall gain of the amplifier is given by the term (R3/R2){(2R1+Rgain)/Rgain}.
Advantages
- The gain of a three op-amp instrumentation amplifier circuit can be easily varied and controlled by adjusting the value of Rgain without changing the circuit structure.
- The gain of the amplifier depends only on the external resistors used. Hence, it is easy to set the gain accurately by choosing the resistor values carefully.
- The input impedance of the instrumentation amplifier is dependent on the non-inverting amplifier circuits in the input stage. The input impedance of a non-inverting amplifier is very high.
- The output impedance of the instrumentation amplifier is the output impedance of the difference amplifier, which is very low.
- The CMRR of the op-amp 3 is very high and almost all of the common mode signal will be rejected.
Key takeaways
This instrumentation amplifier provides high input impedance for exact measurement of input data from transducers. The output impedance of the instrumentation amplifier is the output impedance of the difference amplifier, which is very low.
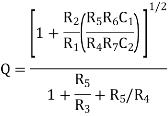
The generalizedd impedance converter (GIC) is highly insensitive to component variation. The GIC filter design was introduced by Mikhael and Bhattacharaya and proved to be very insensitive to non–ideal component characteristics and variations in component values. Figure below shows the general topology of the GIC filter. GIC Biquads are two op–amp biquads with good high frequency performance. All but the even notch stages are tunable. The high pass, low pass and band pass stages are gain adjustable. The notch and all pass stages have a fixed gain of unity. All GIC stages have equal capacitor values, unless a capacitor is required to adjust the gain. Notch stages do not rely on element value subtractions for notch quality and are thus immune from degradations in notch quality due to element value errors.
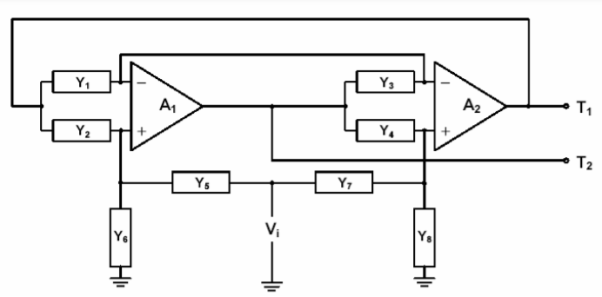
Fig 5 Basic GIC Filter


Choosing the appropriate elements and substituting the proper admittance for each element into the transfer functions in Equations above yields transfer functions representing the four filter types. Table below depicts the transfer functions and admittance selection for each of the eight elements.
Filter Type |  |  |  |  |  |  |  |  | Transfer function |
Low-Pass | G | SC |  |  |  | 0 | 0 |  | 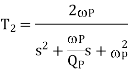 |
High-Pass | G | G |  | G | 0 | G | C |  | 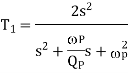 |
Band-Pass | G | G |  | G | 0 | G |  |  |  |
Notch | G | G |  | G | G | 0 | C |  |  |
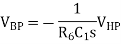
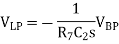
These transfer functions are based on the use of ideal op–amps. Non–ideal transfer functions are derived and shown below
The non–ideal transfer function for T1 is


The non–ideal transfer function for T2 is


Where 1 ωt and 2 ωt are the gain bandwidth product (GBWP) of the two op amps used. Note that (ωt → ∞), assuming ideal op–amps, the non–ideal transfer function equations simplify the ideal equations from Table.
Before the introduction of the transistor and the integrated circuit, coils of wire with large inductance were used in electronic filters. An inductor can be replaced by a much smaller assembly consisting of a capacitor, operational amplifiers or transistors, and resistors. This is especially useful in integrated circuit technology where building inductors from large loops of wire is impractical.
The circuit in Figure below reverses the operation of a capacitor, thus making a simulated inductor. An inductor resists any change in its current, so when a dc voltage is applied to an inductance, the current rises slowly, and the voltage falls as the external resistance becomes more significant.
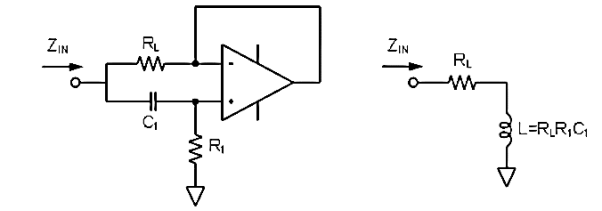
Fig 6 Simulated Inductor
An inductor passes low frequencies more readily than high frequencies, the opposite of a capacitor. An ideal inductor has zero resistance. It passes dc without limitation, but it has infinite impedance at infinite frequency.
For the circuit in figure above, if a DC voltage step is suddenly applied to the inverting input through resistor RL, the op amp ignores the sudden step because the change is also coupled directly to the non-inverting input via C1. The op amp represents high impedance, just as an inductor does. As C1 charges through R1, the voltage across R1falls, so the op-amp draws current from the input through RL. This continues as the capacitor charges, and eventually the op-amp has an input and output close to virtual ground because the lower end of R1 is connected to ground.
When C1 is fully charged, resistor RL limits the current flow, and this appears as a series resistance within the simulated inductor. This series resistance limits the Q of the inductor. Real inductors generally have much less resistance than the simulated variety.
There are some limitations of a simulated inductor like this:
- One end of the inductor is connected to virtual ground.
- The simulated inductor cannot be made with high Q, due to the series resistor RL.
- It does not have the same energy storage as a real inductor. The collapse of the magnetic field in a real inductor causes large voltage spikes of opposite polarity. The simulated inductor is limited to the voltage swing of the op amp, so the flyback pulse is limited to the voltage swing.
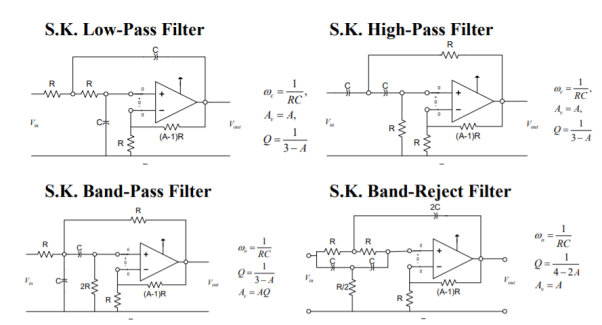
The Sallen and Key Filter design is a second-order active filter topology which we can use as the basic building blocks for implementing higher order filter circuits, such as low-pass (LPF), high-pass (HPF) and band-pass (BPF) filter circuits.
As we have seen in this filters section, electronic filters, either passive or active, are used in circuits where a signals amplitude is only required over a limited range of frequencies. The advantage of using Sallen-Key Filter designs is that they are simple to implement and understand.
The Sallen and Key topology is an active filter design based around a single non-inverting operational amplifier and two resistors, thus creating a voltage-controlled voltage-source (VCVS) design with filter characteristics of, high input impedance, low output impedance and good stability, and as such allows individual Sallen-key filter sections to be cascaded together to produce much higher order filters.
But before we look at the design and operation of the Sallen-key filter, let’s first remind ourselves of the characteristics of a single resistor-capacitor, or RC network when subjected to a range of input frequencies.
Sallen-Key is one of the most common filter configurations for designing first-order (1st-order) and second-order (2nd-order) filters and as such is used as the basic building blocks for creating much higher order filters.
The main advantages of the Sallen-key filter design are:
- Simplicity and Understanding of their Basic Design
- The use of a Non-inverting Amplifier to Increase Voltage Gain
- First and Second-order Filter Designs can be Easily Cascaded Together
- Low-pass and High-pass stages can be Cascaded Together
- Each RC stage can have a different Voltage Gain
- Replication of RC Components and Amplifiers
- Second-order Sallen-key Stages have Steep 40dB/decade roll-off than cascaded RC
However, there are some limitations to the basic Sallen-key filter design in that the voltage gain, AV and magnification factor, Q are closely related due to the use of an operational amplifier within the Sallen-key design. Almost any Q value greater than 0.5 can be realised since using a non-inverting configuration, the voltage gain, AV will always be greater than 1, (unity) but must be less than 3 otherwise it will become unstable.
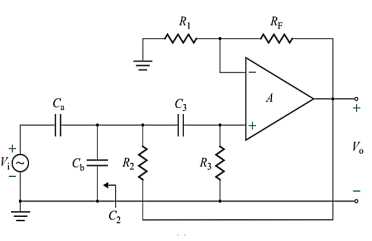
The simplest form of Sallen-key filter design is to use equal capacitor and resistor values (but the C’s and R’s don’t have to be equal), with the operational amplifier configured as a unity-gain buffer as shown. Note that resistor RA is no longer connected to ground but instead provides positive feedback for the amplifier.
Sallen-key High Pass Filter Circuit
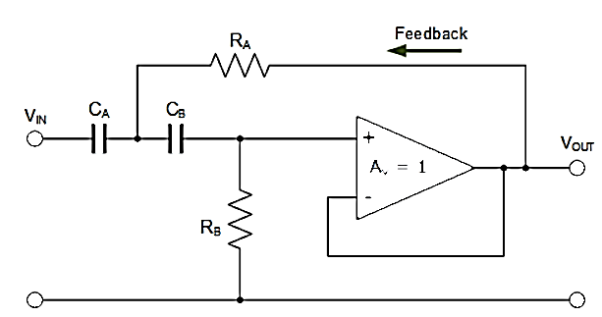
Fig 7 Sallen-key High Pass Filter Circuit
The passive components CA, RA, CB and RB form the second-order frequency-selective circuit. Thus at low frequencies, capacitors CA and CB appear as open circuits, so the input signal is blocked resulting in no output. At higher frequencies, CA and CB appear to the sinusoidal input signal as short circuits, so the signal is buffered directly to the output.
However, around the cut-off frequency point, the impedance of CA and CB will be the same value as RA and RB, as noted above, so the positive feedback produced through CB provides voltage gain and and increase in output signal magnification, Q.
Since we now have two sets of RC networks, the above equation for the cut-off frequency for a Sallen-Key filter is modified too
Sallen-key Cut-off Frequency Equation
fc =
If the two series capacitors CA and CB are made equal (CA = CB = C) and the two resistors RA and RB are also made equal (RA = RB = R), then the above equation simplifies to the original cut-off frequency equation of
fC=
As the operational amplifier is configured as a unity gain buffer, that is A = 1, the cut-off frequency, ƒC and Q are completely independent of each other making for a simpler filter design. Then the magnification factor, Q is calculated as:
Therefore for the unity-gain buffer configuration, the voltage gain (AV) of the filter circuit is equal to 0.5, or -6dB (over damped) at the cut-off frequency point, and we would expect to see this because its a second-order filter response, as 0.7071*0.7071 = 0.5. That is -3dB*-3dB = -6dB.
However, as the value of Q determines the response characteristics of the filter, the proper selection of the operational amplifiers two feedback resistors, R1 and R2, allows us to select the required passband gain A for the chosen magnification factor, Q.
Note that for a Sallen-key filter topology, selecting the value of A to be very close to the maximum value of 3, will result in high Q values. A high Q will make the filter design sensitive to tolerance variations in the values of feedback resistors R1 and R2. For example, setting the voltage gain to 2.9 (A = 2.9) will result in the value of Q being 10 (1/(3-2.9)), thus the filter becomes extremely sensitive around ƒC.
Sallen-key Filter Response
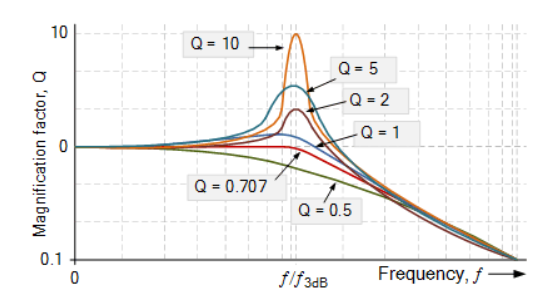
Fig 8 Frequency Response
Then we can see that the lower the value of Q the more stable will be the Sallen and Key filter design. While high values of Q can make the design unstable, with very high gains producing a negative Q would lead to oscillations.
Example:
Design a second-order high-pass Sallen and Key Filter circuit with the following characteristics: ƒC = 200Hz, and Q = 3
To simplify the math’s a little, we will assume that the two series capacitors CA and CB are equal (CA = CB = C) and also the two resistors RA and RB are equal (RA = RB = R).
We will choose 

The calculated value of R is 7957Ω, so the nearest preferred value used is 8kΩ.
For Q = 3, the gain is calculated as:
If  then
then
If A = 2.667, then the ratio of R1/R2 = 1.667 as shown.
Assume a value of 

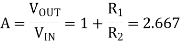
The calculated value of R2 is 5998Ω, so the nearest preferred value used 6000Ω or 6kΩ. This then gives us the final circuit for our Sallen and Key high-pass filter example of
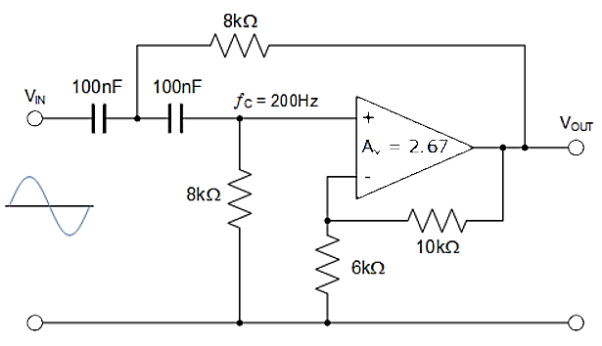
Fig 9 Sallen and Key High Pass Filter
Key takeaway
Properties of Sallen-Key Filters:
1. Simplicity of the design
2. Non-Inverting Amplifier (positive Gain)
3. Replication of elements
Limitations of Sallen-Key Filters:
1. The Gain and Q are related
2. Q must be > ½, since A must be > 1
Second Order Active Low Pass Filter
Second-Order Filters are also attributed to as VCVS filters since Op-Amp used here is Voltage Controlled Voltage Source Amplifier. This is another important type of active filter used in applications. The frequency response of the second-order low pass filter is indistinguishable to that of the first-order type besides that the stopband roll-off will be twice the first-order filters at 40dB/decade. Consequently, the design steps wanted of the second-order active low pass filter are identical. A simple method to get a second-order filter is to cascade two first-order filters.
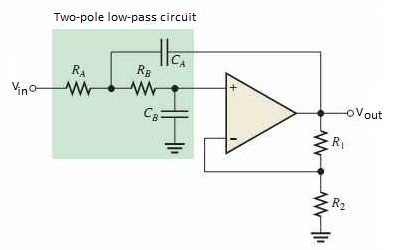
Fig 10 Second-Order Active Low Pass Filter
Second Order Active Low Pass Filter Design And Example
Example:
Assume Rs1 = Rs2 = 15KΩ and capacitor C1 = C2 = 100nF. The gain resistors are R1=1KΩ, R2= 9KΩ, R3 = 6KΩ, and R4 =3KΩ. Design a second-order active low pass filter with these specifications.
The cut-off frequency is given as

(1)

The gain of first stage amplifier is


The gain of second stage amplifier is


Total Gain of the filter


The total gain in dB
(2) 
(3) 
The gain at cut-off frequency is
(4) Gain at 
Second Order High Pass Filter Circuit
The designing procedure for the second order active filter is same as that of the first order filter because the only variation is in the roll-off. If the roll-off of the first order active high pass filter is 20dB/decade, then roll-off of the second order filter is 40 dB/ decade. It means the twice of the value of the first order filter. The circuit of second order filter is shown below:
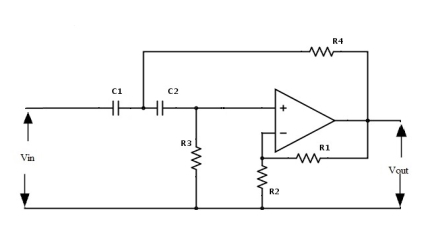
Fig 11 Second Order HPF
The gain of the filter is 1+ R1/R2 and the equation of the cut-off frequency is fc = 1/ 2π√R3R4C1C2
Second Order High Pass Filter Example
Design a filter with cut-off frequency 4 KHz and the delay rate in the stop band is 40dB/decade. As the delay rate in the stop band is 40dB/decade we can clearly say that the filter is second order filter.
Let us consider the capacitor values as C1= C2 = C = 0.02µF
The equation of the cut-off frequency is fc = 1/ 2πRC Hz
By re-arranging this equation we have R = 1/ 2πfC
By substituting the values of cut-off frequency as 4 KHz and capacitor as 0.02µF
R = 1.989 KΩ = 2KΩ.
Let the gain of the filter is 1+ R1/R2 = 2
R1 / R2 = 1
R1 = R2
Therefore, we can take R1 = R2 = 10 KΩ
Thus, the obtained filter is shown as below:
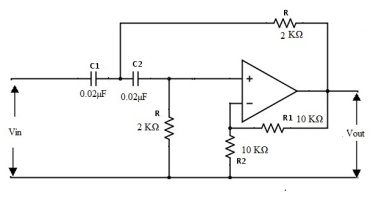
Fig 12 HPF Designed circuit
Design and frequency scaling of First order and second order Active BP
A Band Pass Filter is a circuit which allows only particular band of frequencies to pass through it. This Pass band is mainly between the cut-off frequencies and they are fL and fH, where fL is the lower cut-off frequency and fH is higher cut-off frequency.
The center frequency is denoted by ‘fC’ and it is also called as resonant frequency or peak frequency.
Combination of low pass and high pass responses gives us band pass response as shown below:
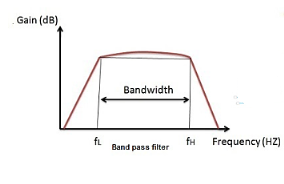
Fig 13 BPF response
Active Band pass filter:
Depending on the quality factor the band pass filter is classified into Wide band pass filter and Narrow band pass filter. The quality factor is also referred as ‘figure of merit’. By cascading High Pass Filter and Low Pass Filter with an amplifying component we obtain band pass filter.

Fig 16 BPF block diagram
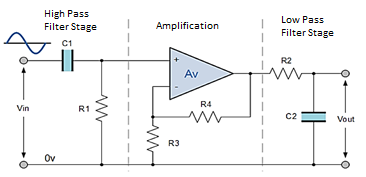
Fig 14 BPF
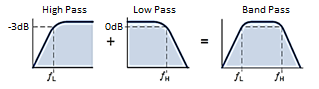
Fig 15 Bandwidth of BPF
Example:
Consider the infinity gain multiple feedback active filter circuit for which the resonating frequency is 1.5 kHz, maximum Voltage gain is 15 and quality factor is 7. Then component values are calculated as follows:
For Resistors
R1 =Q/ 2πfc CAmax
R2 = Q/ πfc C
And R3 = Q/ 2πfc C(2Q2 - Amax)
Choosing capacitor C1 =C2 =C = 0.02µF
Q= fc / Bandwidth = 0.5 √(R2/ R1) = 7
Applying values to R1, R2, R3 we get R1 = 2.47kΩ , R2 = 74.27 kΩ , R3 = 447.4 kΩ.
We consider that the changed resistor value as R3´ and the changed cut-off frequency value fc´=2 KHz then we can equate for the new resistor value as follows:
R3´ = R3 (fc/fc´)2 = 447.4(1.5/2)2 = 251.66 Ω
Therefore, simply by taking the required frequency we can calculate the new resistor value.
Example:
An active band pass filter that has a voltage gain Av of one (1) and a resonant frequency, ƒr of 1kHz is constructed using an infinite gain multiple feedback filter circuit. Calculate the values of the components required to implement the circuit.
Firstly, we can determine the values of the two resistors, R1 and R2 required for the active filter using the gain of the circuit to find Q as follows.
Av = 1 = -2Q2
QBP = √(1/2) =0.7071
Q = 0.7071 = 0.5 √(R1/R2)
Or R1/R2 =2
Then we can see that a value of Q = 0.7071 gives a relationship of resistor, R2 being twice the value of resistor R1. Then we can choose any suitable value of resistances to give the required ratio of two. Then resistor R1 = 10kΩ and R2 = 20kΩ.
The center or resonant frequency is given as 1kHz. Using the new resistor values obtained, we can determine the value of the capacitors required assuming that C = C1 = C2.
F1 = 1000 Hz = 
C =  =
=  =11.2nF
=11.2nF
The closest standard value is 10nF.
Wide and narrow band BR Butter worth filters and notch filter
The frequency response of the Butterworth Filter approximation function is also often referred to as “maximally flat” (no ripples) response because the pass band is designed to have a frequency response which is as flat as mathematically possible from 0Hz (DC) until the cut-off frequency at -3dB with no ripples. Higher frequencies beyond the cut-off point rolls-off down to zero in the stop band at 20dB/decade or 6dB/octave. This is because it has a “quality factor”, “Q” of just 0.707.
However, one main disadvantage of the Butterworth filter is that it achieves this pass band flatness at the expense of a wide transition band as the filter changes from the pass band to the stop band. It also has poor phase characteristics as well. The ideal frequency response, referred to as a “brick wall” filter, and the standard Butterworth approximations, for different filter orders are given below.
Ideal Frequency Response for a Butterworth Filter
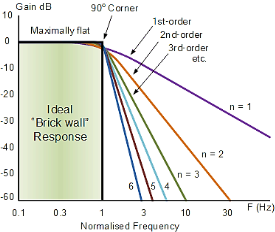
Fig 16 Frequency response for butter worth filter
Note that the higher the Butterworth filter order, the higher the number of cascaded stages there are within the filter design, and the closer the filter becomes to the ideal “brick wall” response.
In practice however, Butterworth’s ideal frequency response is unattainable as it produces excessive passband ripple.
Where the generalized equation representing a “nth” Order Butterworth filter, the frequency response is given as:
H(jw) = 1/ √(1+ €2(w/wp)2n)
Where: n represents the filter order, Omega ω is equal to 2πƒ and Epsilon ε is the maximum pass band gain, (Amax). However, if you now wish to define Amax at a different voltage gain value, for example 1dB, or 1.1220 (1dB = 20*logAmax) then the new value of epsilon, ε is found by:
H1 = H0 (1 + €2)1/2 | Where:
|
Transpose the equation to give:
H0/H1 =1.1220 =(1 + €2)1/2 gives € = 0.5088
The Frequency Response of a filter can be defined mathematically by its Transfer Function with the standard Voltage Transfer Function H(jω) written as:
 |
|
Note: ( jω ) can also be written as ( s ) to denote the S-domain. and the resultant transfer function for a second-order low pass filter is given as:
 = (S2 + S+ 1)-1/2
= (S2 + S+ 1)-1/2
Example:
Find the order of an active low pass Butterworth filter whose specifications are given as: Amax = 0.5dB at a pass band frequency (ωp) of 200 radian/sec (31.8Hz), and Amin = -20dB at a stop band frequency (ωs) of 800 radian/sec. Also design a suitable Butterworth filter circuit to match these requirements.
Firstly, the maximum pass band gain Amax = 0.5dB which is equal to a gain of 1.0593, remember that: 0.5dB = 20*log(A) at a frequency (ωp) of 200 rads/s, so the value of epsilon ε is found by:
1.0593 = =(1 + €2)1/2
€ = 0.3495
Secondly, the minimum stop band gain Amin = -20dB which is equal to a gain of 10 (-20dB = 20*log(A)) at a stop band frequency (ωs) of 800 rads/s or 127.3Hz.
Substituting the values into the general equation for a Butterworth filters frequency response gives us the following:
H(jw) = 1/ √(1+ €2(w/wp)2n)

(10)2 = 1 + 0.1221 x 42n
On solving this we get n = 2.42
Since n must always be an integer ( whole number ) then the next highest value to 2.42 is n = 3, therefore a “a third-order filter is required” and to produce a third-order Butterworth filter, a second-order filter stage cascaded together with a first-order filter stage is required.
From the normalised low pass Butterworth Polynomials table above, the coefficient for a third-order filter is given as (1+s)(1+s+s2) and this gives us a gain of 3-A = 1, or A = 2. As A = 1 + (Rf/R1), choosing a value for both the feedback resistor Rf and resistor R1 gives us values of 1kΩ and 1kΩ respectively as: ( 1kΩ/1kΩ ) + 1 = 2.
We know that the cut-off corner frequency, the -3dB point (ωo) can be found using the formula 1/CR, but we need to find ωo from the pass band frequency ωp then,
NOTCH FILTERS
Notch filters, also commonly referred to as band-stop or band-rejection filters, are designed to transmit most wavelengths with little intensity loss while attenuating light within a specific wavelength range (the stop band) to a very low level. They are essentially the inverse of band pass filters, which offer high in-band transmission and high out-of-band rejection so as to only transmit light within a small wavelength range.
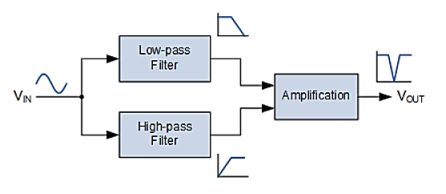
Fig 17 Notch Filter
Notch filters are useful in applications where one needs to block light from a laser. For instance, to obtain good signal-to-noise ratios in Raman spectroscopy experiments, it is critical that light from the pump laser be blocked. This is achieved by placing a notch filter in the detection channel of the setup. In addition to spectroscopy, notch filters are commonly used in laser-based fluorescence instrumentation and biomedical laser systems.
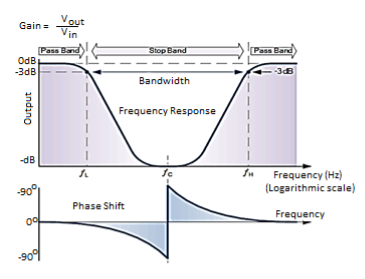
Fig 18 Band stop frequency response
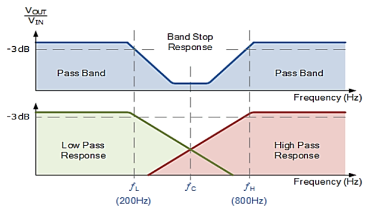
Fig 19 Band stop frequency characteristics
Example:
Design a basic wide-band, RC band stop filter with a lower cut-off frequency of 200Hz and a higher cut-off frequency of 800Hz. Find the geometric center frequency, -3dB bandwidth and Q of the circuit.
F = 1/ 2πRC
The upper and lower cut-off frequency points for a band stop filter can be found using the same formula as that for both the low and high pass filters as shown.
Assuming a capacitor, C value for both filter sections of 0.1uF, the values of the two frequency determining resistors, RL and RH are calculated as follows.
Low Pass Filter Section
FL = 1/ 2πRLC = 200Hz and C =0.1 µF
RL = 1/ 2π x 200 x 0.1 10 -6 = 7958Ω or 8kΩ
High Pass Filter Section
FH = 1/ 2πRHC = 800Hz and C =0.1 µF
RH = 1/ 2π x 800 x 0.1 10 -6 = 1990Ω or 2kΩ
From this we can calculate the geometric center frequency, ƒC as:
Fc = √(fL x fH) = √(200x 800) = 400 Hz
fBW = fH - fL = 800 – 200 =600 Hz
Q = Fc/ fBW = 400/600 = 0.67 OR -3.5 dB
If we make the op-amps feedback resistor and its two input resistors the same values, say 10kΩ, then the inverting summing circuit will provide a mathematically correct sum of the two input signals with zero voltage gain.
Then the final circuit for our band stop (band-reject) filter example will be:
Band Stop Filter Design
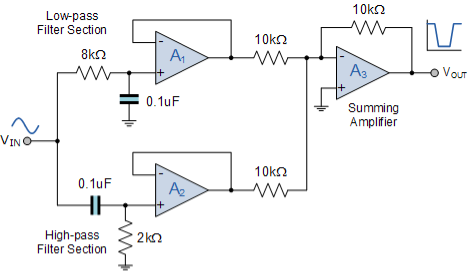
Fig 20 Band Stop Filter
Example:
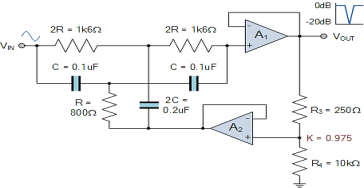
Design a two op-amp narrow-band, RC notch filter with a center notch frequency, ƒN of 1kHz and a -3dB bandwidth of 100 Hz. Use 0.1uF capacitors in your design and calculate the expected notch depth in decibels.
Data given: ƒN = 1000Hz, BW = 100Hz and C = 0.1uF.
1. Calculate value of R for the given capacitance of 0.1uF
R =  x 106
x 106
R = 795 Ω
2. Calculate value of Q
Q = FN/ fBW = 1000/100 =10
3. Calculate value of feedback fraction k
K = 1 – 1/4Q =1- 1/ 4x 10 = 0.975
4. Calculate the values of resistors R3 and R4
K = 0.975 = R4/(R3+R4)
Assuming R4 = 10kΩ then R3 is
R3 = R4 – 0.975 X R4
R3 =250Ω
5. Calculate expected notch depth in decibels, dB
1/Q =1/10 =0.1
fN(dB) = 20 log (0.1) = -20dB
Notch Filter Design
All pass filters
An all-pass filter is that which passes all frequency components of the input signal without attenuation but provides predictable phase shifts for different frequencies of the input signals. The all-pass filters are also called delay equalizers or phase correctors. An all-pass filter with the output lagging behind the input is illustrated in figure.
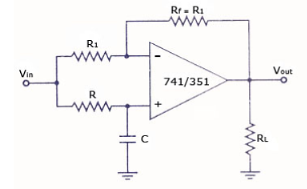
Fig 21 Circuit diagram
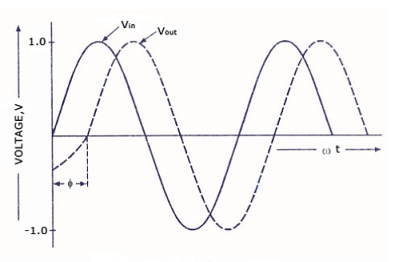
Fig 22 Input, output waveform
The output voltage vout of the filter circuit shown in fig. (a) can be obtained by using the superposition theorem
vout = -vin +[ -jXC/R-jXC]2vin
Substituting -jXC = [1/j2∏fc] in the above equation, we have
vout = vin [-1 +( 2/ j2∏Rfc)]
Or vout / vin = 1- j2∏Rfc/1+ j2∏Rfc
The Transfer function of All Pass Filter can be expressed as mentioned above. It can be synthesized to the following equation:
HAP = HLP - HBP + HHP = 1 - 2* HBP
The function of All Pass filter is
- To introduce phase shift or phase delay to the response of the circuit.
- Amplitude of the filter is unity for all the frequencies.
- Phase response is changing from 0 degree to 360 degree.
KHN Filters
The Sallen-Key and Multiple Feedback filters have the advantage that they use a small number of components, especially op-amps. They were particularly popular when op-amps were relatively expensive. However, it may be impossible to design a circuit with a particular transfer function or the resulting design may be sensitive to variations in component values. In these situations, the best approach may be to take advantage of reductions in component costs, which mean that op-amps are now commonly available with up to four op-amps in a single package and use a filter design which contains several op-amps.
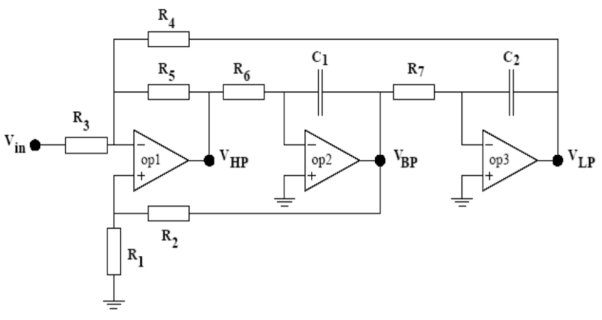
Figure 23: An inverting state-variable or KHN filter
One type of filter that contains several op-amps in a single stage is the state variable or KHN filter, first proposed by Kerwin, Huelsman and Newcomb. As shown in Figure above this filter contains three op-amps from which highpass, band-pass and low-pass responses are available simultaneously.
The first step in analysing the circuit is to break it down into the different functional blocks. The op-amp labelled op1 has quite a complicated looking set of connections. However, the connections to the other two op-amps are much simpler, for example isolating the part of the circuit containing op3 leads to the simple circuit shown in Figure
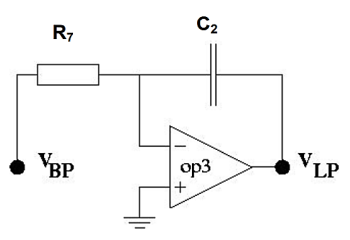
Figure (24) The connections in op-amp op3 in the KHN Filter in Figure (23)
This is simply the circuit with a capacitor acting as the input impedance and a resistor in the feedback loop. The relationship between the input and the output of this circuit is therefore
In fact, op2 has equivalent connections, and so the relationship between the output of this circuit block and its input is
Now consider the remaining op-amp in the circuit, op1. The components connected to op1 mean that the voltage at the output of this op-amp depends upon a linear combination of the input to the filter circuit and the outputs from the two other op-amps within the filter. This op-amp therefore has three inputs and linear superposition can be used to derive an expression for its output. In linear superposition the total output is found by considering the response of the circuit to each voltage or current source separately. Any voltage source that is not being considered acts as a short-circuit and any current source that is not being considered acts as an open-circuit. For the three inputs to the circuit around op1, short-circuiting the output from op2 shows that for Vin and VLP op1 is configured as a summing amplifier that adds the two components.
To determine the contribution to the output of op1 from the output from op2 by superposition, short-circuit both Vin and VLP. This means that both R3 and R4 and connect the inverting op-amp input to ground, these two resistors therefore act in parallel so that the voltage at the inverting op-amp input is
Similarly, the voltage at the non-inverting input is
For the ideal op-amp V- = V+
This contribution can then be combined with the other two contributions to give

Then remember that the analysis of the responses of the other two op-amps gave
These two expressions can then be included into


This is the transfer function of a second-order high-pass filter, with


The band-pass filter response can then be obtained from the high-pass response using
In turn the expression for the band-pass response of the system can be used to obtain an expression for the low-pass filter response using
Key takeaways
- It can be used as a phase corrector.
- It is used to compensate the phase changes of voice signals that may have occurred over telephone wires during transmission.
- It is used in single side band suppressed carrier i.e. SSB-SC modulation based circuit designs.
Higher order filters are designed by cascading the first and second order filters which we have discussed in the above section in detail. The third order low pass filter can be designed by connecting first and second order filters in cascade. Below shown is the third order LPF which has first order Butterworth LPF and second order Butterworth connected in series.
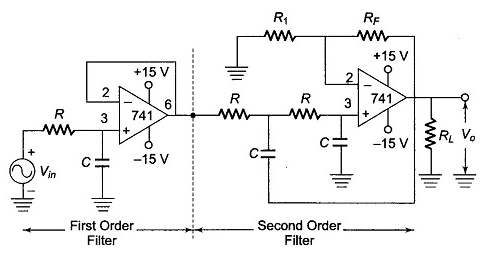
Fig Third order Butter worth Filter
Similarly, the fourth order Butter worth filter can be designed by connecting two second order filters in series as shown below.
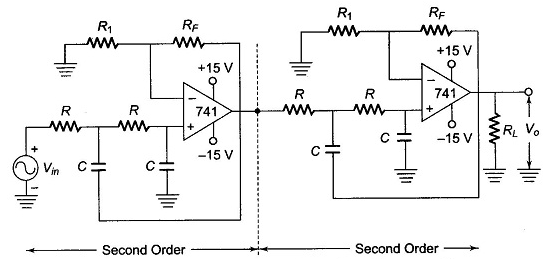
Fig Fourth order Butterworth filter
The frequency for these filters is given as
fH =1/2πRC
As with first and second order filters, third and fourth order high pass filters are formed by simply interchanging the position of frequency determining resistors and capacitors. The overall gain of higher order filters is fixed because all the frequency determining resistors and capacitors are equal.
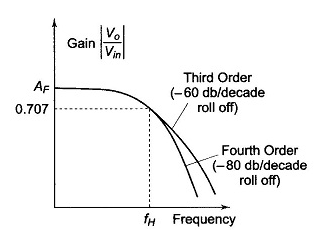
Fig Third and Fourth Order Frequency Response
The realization of higher-order filters uses the cascade of first- and second-order active filters. The design of each cascaded active filter uses a set of design equations which permit the designer to find the value of the components of the filter in terms of the first- or second-order transfer function. The design of these active filters is usually done for the normalized approximation and then a frequency denormalization and an impedance denormalization (which is generally arbitrary) is used to achieve the actual filter specifications and to get practical component values. A word of caution is in order concerning the filters that have been discussed in this section.
The design techniques introduced work well until the frequency of the filter begins to become larger than about 10 kHz. At this point, the frequency response of the op amp can no longer be ignored. Some of the realizations are more susceptible than others to the influence of the op amp frequency response. There are methods which permit active filters to be extended to 100 kHz and above but they are beyond the scope of this chapter. It has been observed that the influence of the op amp frequency response on the filter performance increases as the Q of the pole becomes higher.
Examples
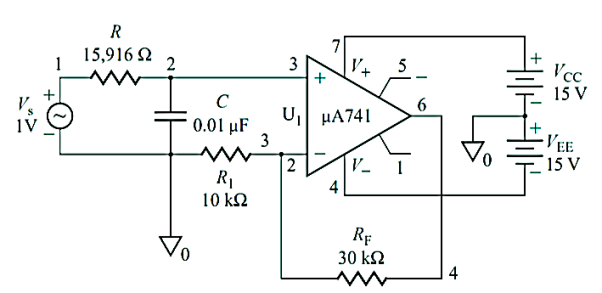
Q) Design a first-order low-pass filter to give a high cut-off frequency of fo 1 kHz with a pass-band gain of 4. If the desired frequency is changed to fn 1.5 kHz, calculate the new value of Rn?
Sol: (a) The high cut-off frequency is fo 1 kHz. Choose a value of C less than or equal to 1 F: let C 0.01
F: let C 0.01 F. Using Equation below calculate the value of R
F. Using Equation below calculate the value of R
R =  x 106 = 15.916 kOhm
x 106 = 15.916 kOhm
Choose values of R1 and RF to meet the pass-band gain K
K= 1+RF ⁄ R1
RF ⁄ R1 = 4-1 =3
If we let R1=10 kOhm, RF= 30kOhm
Calculate the frequency scaling factor, FSF =fo ⁄ fn
FSF = 1kHz/1.5kHz =0.67
Calculate the new value of Rn =FSF x R = 0.67 x 16000= 10.66kOhm
The LPF design is
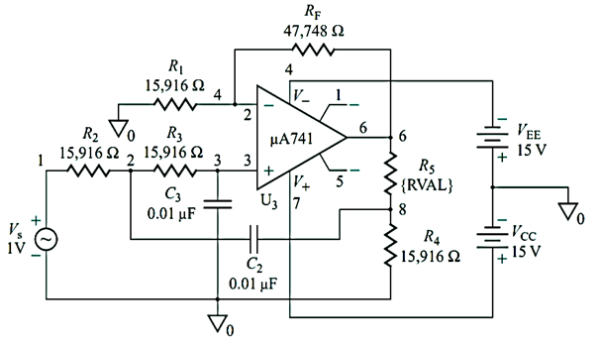
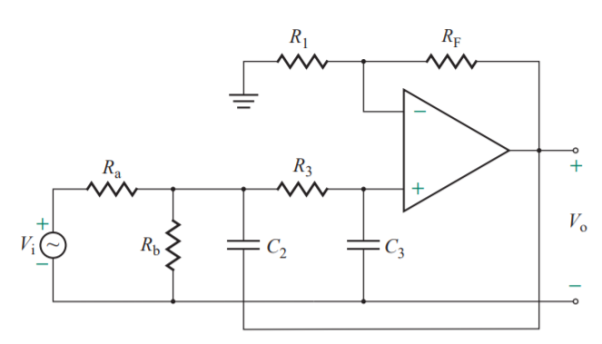
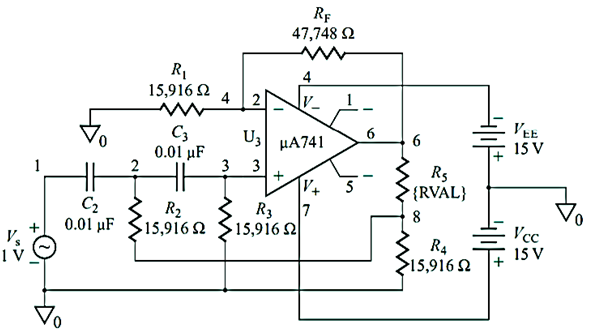
Q) Design a second-order low-pass filter as in Fig. 12.14, to give a high cutoff frequency of fH =fo =1 kHz, a pass-band gain of K= 4, and Q =0.707, 1, 2, and infinity.
Sol: To simplify the design calculations, let R1= R2= R3= R4= R and let C2= C3= C. Choose a value of C less than or equal to 1 F: Let C= 0.01  F. For R2 =R3 =R and C2 =C3 =C
F. For R2 =R3 =R and C2 =C3 =C
R=  x 106 = 15.916 kOhm
x 106 = 15.916 kOhm
Then RF =(K -1)/R1= (4-1) x 15,916= 47,748 Ohm
For Q= 0.707 and K= 4, gives x =1.586 ⁄ K =1.586 ⁄ 4= 0.396.
R5/R4=1-x/x
Which, for x= 0.396 and R4= R= 15,916 Ohm
R5= 1.525 x 15,916= 24,275 Ohm
For Q= 1 and K= 4, gives 3-xK= 1 or x= 2 ⁄ K= 0.5
R5= R= 15,916 Ohm
For Q= 2 and K= 4, gives 3-xK= 1/2 or x= 2.5 ⁄ K= 0.625 Ohm
R5 = 0.6R = 9550 Ohm
For Q= infinity and K= 4, gives 3-xK= 1/Q=0 or x= 3 ⁄ K= 0.75 Ohm
R5 = 0.333R = 5305 Ohm
The design of LPF with above circuit parameters is shown below. This is a PSpice model
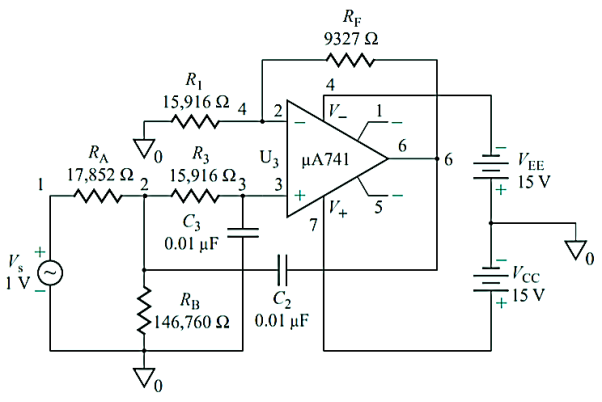
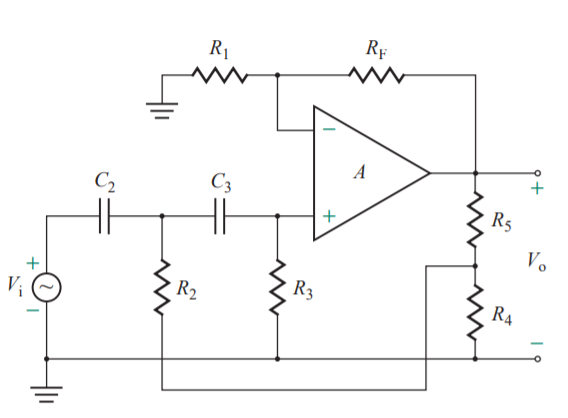
Q) Designing a second-order low-pass Butterworth filter for |H(jωo)|= 1. Design a second-order Butterworth low-pass filter as in Figure below to yield H(jωo)= 1 (or 0 dB), a cutoff frequency of fo= 1 kHz, and Q= 0.707.
Sol:
For the Butterworth response, Q= 0.707. From above example we have C= 0.01 F and R= 15,916
F and R= 15,916
K = 3 – (1/ Q) = 3 – (1/ 0.707) = 1.586
RF = (K - 1)/R1 = (1.586 - 1) * 15,916 = 9327 
Ra = RK /3 - K = [15,916 * 1.586]/ [3 - 1.586] = 17,852 
Rb = RK /2K - 3 = [15,916 * 1.586]/ [(2 * 1.586) – 3] = 146,760 
|H(j0)|= 3 - K = 3 - 1.586 = 1.414
The design is shown below
Q) Design a second-order high-pass filter as in Figure below, with a cut-off frequency of fo= 1 kHz, a pass-band gain of K 4, and Q 0.707, 1, 2, and infinity.
Sol: Since high-pass filters are formed simply by interchanging the Rs and Cs of the input RC network and since fo= 1 kHz, we can use the values of R and C that were determined for the second-order low-pass filter of Example above—that is, C= 0.01  F, and R4= R= 15,916
F, and R4= R= 15,916 
For Q= 0.707, R5= 24,275 
For Q= 1, R5= R= 15,916 
For Q 2, R5= 0.6R= 9550 
For Q=infinity, R5= 0.3333R= 5305 
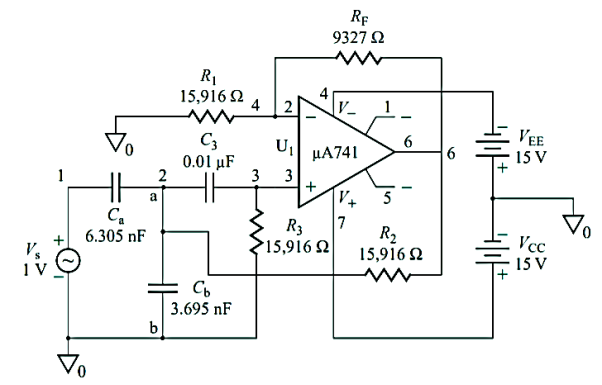
Q) Design a second-order Butterworth high-pass filter as in Figure below to yield |H(j∞)|= 1 (or 0 dB), a cutoff frequency of fo= 1 kHz, and Q= 0.707.
Sol: For Q= 0.707, and from above question we take C= 0.01  F, and R= 15,916
F, and R= 15,916 
K = 3 – 1/ Q = 3 – 1/ 0.707 = 1.586
RF= (K - 1)/R1= (1.586 - 1) x 15,916= 9327 
Ca = C/ K = 0.01  F/ 1.586 = 6.305 nF
F/ 1.586 = 6.305 nF
Cb = C(K - 1)/ K = 0.01  F * (1.586 - 1) /1.586 = 3.695 nF
F * (1.586 - 1) /1.586 = 3.695 nF
Second-order high-pass Butterworth filter for PSpice simulation is below
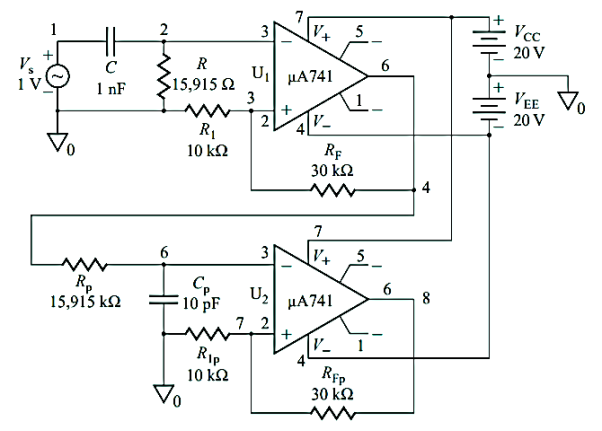
Q) Designing a wide-band-pass filter (a) Design a wide-band-pass filter with fL= 10 kHz, fH= 1 MHz, and a pass-band gain of KPB= 16. (b) Calculate the value of Q for the filter.
Sol:
a) Let the gain of the high-pass section be KH 4. For the first-order high-pass section, fL= 10 kHz
We let C= 1 nF
R=  x 109 = 15.915 k
x 109 = 15.915 k 
KH= 1+RF/R1
4= 1+ RF/R1
RF/R1=3
If we let R1= 10 k  , RF= 3R1= 30 k
, RF= 3R1= 30 k  . For the first-order low-pass section, fH= 1 MHz and the desired gain is KL= KPB ⁄ KH =16 ⁄ 4 =4
. For the first-order low-pass section, fH= 1 MHz and the desired gain is KL= KPB ⁄ KH =16 ⁄ 4 =4
We let C′= 10 pF
R’=  x 1012=15.915 k
x 1012=15.915 k 
KL= 1+R’F/R’1
4= 1+ R’F/R’1
R’F/R’1=3
b) fC = √10 kHz * 1 MHz = 100 kHz
BW 1 MHz - 10 kHz= 990 kHz
Q = (100kHz)/1MHz-10kHz) = 0.101
The circuit for First-Order BPF is shown below.
References:
1. Gayakwad: Op-Amps and Linear Integrated Circuits, 4th Edition Prentice Hall of India, 2002.
2. Franco, Analog Circuit Design: Discrete & Integrated, TMH, 1st Edition.
3. Salivahnan, Electronics Devices and Circuits, TMH, 3rd Edition, 2015
4. Millman and Halkias: Integrated Electronics, TMH, 2nd Edition, 2010




