Unit - 1
Random Processes & Noise
Random signals and noise are present in several engineering systems. Practical signals seldom lend themselves to a nice mathematical deterministic description. It is partly a consequence of the chaos that is produced by nature. However, chaos can also be man-made, and one can even state that chaos is a condition sine qua non to be able to transfer information. Signals that are not random in time but predictable contain no information, as was concluded by Shannon in his famous communication theory.
A (one-dimensional) random process is a (scalar) function y(t), where t is usually time, for which the future evolution is not determined uniquely by any set of initial data or at least by any set that is knowable to you and me. In other words, random process" is just a fancy phrase that means unpredictable function". Random processes y takes on a continuum of values ranging over some interval, often but not always - to +. The generalization to y's with discrete (e.g., integral) values is straightforward
Examples of random processes are:
(i) The total energy E(t) in a cell of gas that is in contact with a heat bath;
(ii) The temperature T(t) at the corner of Main Street and Center Street in Logan, Utah;
(iii) The earth-longitude (t) of a specific oxygen molecule in the earth's atmosphere.
One can also deal with random processes that are vector or tensor functions of time. Ensembles of random processes. Since the precise time evolution of a random process is not predictable, if one wishes to make predictions one can do so only probabilistically. The foundation for probabilistic predictions is an ensemble of random processes |i.e., a collection of a huge number of random processes each of which behaves in its own, unpredictable way. The probability density function describes the general distribution of the magnitude of the random process, but it gives no information on the time or frequency content of the process. Ensemble averaging and Time averaging can be used to obtain the process properties.
Two Ways to View a Random Process
• A random process can be viewed as a function X (t, ω) of two variables, time t ∈ T and the outcome of the underlying random experiment ω∈Ω.
• For fixed t, X (t, ω) is a random variable over Ω.
• For fixed ω, X (t, ω) is a deterministic function of t, called a sample function.
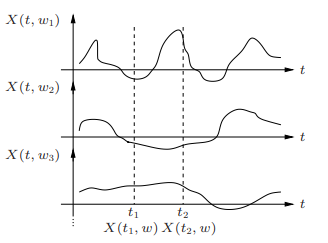
Fig: Random Process
A random process is said to be discrete time if T is a countably infinite set, e.g.,
N = {0, 1, 2, . . .}
Z = {. . . , −2, −1, 0, +1, +2, . . .}
• In this case the process is denoted by Xn, for n ∈N, a countably infinite set, and is simply an infinite sequence of random variables
• A sample function for a discrete time process is called a sample sequence or sample path
• A discrete-time process can comprise discrete, continuous, or mixed r.v.s
Example
• Let Z ∼U [0, 1], and define the discrete time process Xn = Z n for n ≥ 1.
• Sample paths:
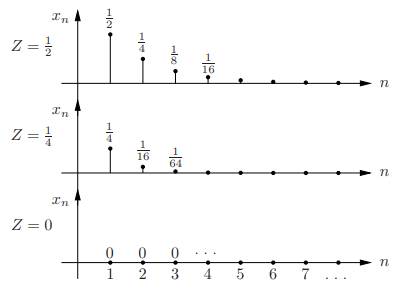
First-order pdf of the process: For each n, Xn = Z n is a r.v.; the sequence of pdfs of Xn is called the first-order pdf of the process
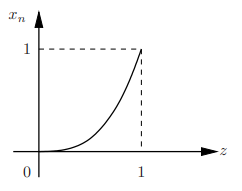
Since Xn is a differentiable function of the continuous r.v. Z, we can find its pdf as f
fXn(x) = 1/(nx(n−1)/n) = 1/n x(1/n)−1) 0 ≤ x ≤ 1.
A stationary process is a stochastic process whose unconditional joint probability distribution does not change when shifted in time. Consequently, parameters such as mean and variance also do not change over time.
A random process is said to be stationary if its statistical characterization is independent of the observation interval over which the process was initiated. Ensemble averages do not vary with time. An ensemble of random processes is said to be stationary if and only if its probability distributions pn depend only on time differences, not on absolute time:

If this property holds for the absolute probabilities pn. Most stationary random processes can be treated as ergodic. A random process is ergodic if every member of the process carries with it the complete statistics of the whole process. Then its ensemble averages will equal appropriate time averages. Of necessity, an ergodic process must be stationary, but not all stationary processes are ergodic.
The mean (or average), mu, of the sample is the first moment:

You will also see this notation sometimes

In R, the mean () function returns the average of a vector.
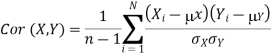
Correlation
The covariance has units (units of X times units of Y), and thus it can be difficult to assess how strongly related two quantities are. The correlation coefficient is a dimensionless quantity that helps to assess this.
The correlation coefficient between X and Y normalizes the covariance such that the resulting statistic lies between -1 and 1. The Pearson correlation coefficient is
The correlation matrix for X and Y is

Covariance
If we have two samples of the same size,  , and
, and  , where i=1,…,n, then the covariance is an estimate of how variation in X is related to variation in Y. The covariance is defined as
, where i=1,…,n, then the covariance is an estimate of how variation in X is related to variation in Y. The covariance is defined as
Where  is the mean of the X sample, and
is the mean of the X sample, and  is the mean of the Y sample. Negative covariance means that smaller X tend to be associated with larger Y (and vice versa). Positive covariance means that larger/smaller X are associated with larger/smaller Y. Note that the covariance of X and Y is exactly the same as the covariance of Y and X. Also note that the covariance of X with itself is the variance of X. The covariance matrix for X and Y is thus
is the mean of the Y sample. Negative covariance means that smaller X tend to be associated with larger Y (and vice versa). Positive covariance means that larger/smaller X are associated with larger/smaller Y. Note that the covariance of X and Y is exactly the same as the covariance of Y and X. Also note that the covariance of X with itself is the variance of X. The covariance matrix for X and Y is thus
• In econometrics and signal processing, a stochastic process is said to be ergodic if its statistical properties can be deduced from a single, sufficiently long, random sample of the process.
• The reasoning is that any collection of random samples from a process must represent the average statistical properties of the entire process.
• In other words, regardless of what the individual samples are, a birds-eye view of the collection of samples must represent the whole process.
• Conversely, a process that is not ergodic is a process that changes erratically at an inconsistent rate.
A linear time-invariant (LTI) system can be represented by its impulse response. More specifically, if X(t)X(t) is the input signal to the system, the output, Y(t), can be written as
Y(t)=
=
The above integral is called the convolution of h and X, and we write
Y(t)=h(t)∗X(t)=X(t)∗h(t)
Note that as the name suggests, the impulse response can be obtained if the input to the system is chosen to be the unit impulse function (delta function) x(t)=δ(t). For discrete-time systems, the output can be written as
Y(n)=h(n)∗X(n)=X(n)∗h(n)
=
= 
The discrete-time unit impulse function is defined as δ(n)= 1, n=0
= 0, otherwise
For the rest of this chapter, we mainly focus on continuous-time signals.
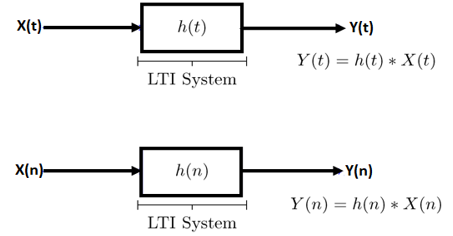
Fig: LTI system
LTI Systems with Random Inputs:
Consider an LTI system with impulse response h(t). Let X(t) be a WSS random process. If X(t) is the input of the system, then the output, Y(t), is also a random process. More specifically, we can write
Y(t)=h(t)∗X(t)=
Here, our goal is to show that X(t) and Y(t) are jointly WSS processes. Let's first start by calculating the mean function of Y(t), μY(t). We have
μY(t)=E[Y(t)]
=E[ ]
]
=
=
=μX
We note that μY(t)is not a function of t, so we can write
μY(t)=μY=μX .
.
Let's next find the cross-correlation function, RXY(t1, t2).
We have
RXY(t1, t2)=E[X(t1)Y(t2)]=E[X(t1) ]
]
=E[
=
=
= (since X(t) is WSS).
(since X(t) is WSS).
We note that RXY(t1, t2)is only a function of τ=t1−t2, so we may write
RXY(τ)=
=h(τ)∗RX(−τ)
=h(−τ) ∗RX(τ).
Similarly, you can show that
RY(τ)=h(τ)∗h(−τ) ∗RX(τ).
From the above results we conclude that X(t)and Y(t)are jointly WSS.
Numerical:
Let X(t)be a zero-mean WSS process with RX(τ)=e−|τ|. X(t)is input to an LTI system with
|H(f)|=√ (1+4π2f2) |f|<2
= 0 otherwise,
Let Y(t) be the output.
- Find μY(t)=E[Y(t)]
- Find RY(τ)
- Find E[Y(t)2]
Solution
Note that since X(t)is WSS, X(t)and Y(t)are jointly WSS, and therefore Y(t)is WSS.
- To find μY(t), we can write
μY=μXH(0) =0*1= 0
b. To find RY(τ), we first find SY(f)
SY(f)=SX(f)|H(f)|2
From Fourier transform tables, we can see that
SX(f)=F{e−|τ|} =2/(1+(2πf)2)
Then, we can find SY(f)as
SY(f)=SX(f)|H(f)|2
=2|f|<2
= 0 otherwise
We can now find RY(τ)by taking the inverse Fourier transform of SY(f)
RY(τ)=8sinc(4τ),
Where
Sinc(f)=sin(πf)/πf
c. We have
E[Y(t)2] = RY(0)=8.
A Power Spectral Density (PSD) is the measure of signal's power content versus frequency. A PSD is typically used to characterize broadband random signals. The amplitude of the PSD is normalized by the spectral resolution employed to digitize the signal.
For vibration data, a PSD has amplitude units of g2/Hz. While this unit may not seem intuitive at first, it helps ensure that random data can be overlaid and compared independently of the spectral resolution used to measure the data.
The average power P of a signal x(t) over all time is therefore given by the following time average:
The term noise is used customarily to designate unwanted signals that tend to disturb the transmission and processing of signals in communication systems, and over which we have incomplete control. In practice, we find that there are many potential sources of noise in a communication system. The sources of noise may be external to the system (e.g., atmospheric noise, galactic noise, man-made noise) or internal to the system. The second category includes an important type of noise that arises from the phenomenon of spontaneous fluctuations of current flow that is experienced in all electrical circuits. In a physical context, the most common examples of the spontaneous fluctuation phenomenon are shot noise which arises because of the discrete nature of current flow in electronic devices; and thermal noise, which is attributed to the random motion of electrons in a conductor.
Internal Noise
Also called fundamental noise which is originated within electronic devices or circuits. They are called fundamental sources because they are the integral part of the physical nature of the material used for making electronic components.
This type of noise follows certain rules. Therefore, it can be eliminated by properly designing the electronic circuits and equipment.
The fundamental noise sources produce different types of noise. They are as follows.
(i) Thermal noise
(ii) Shot noise
(iii) Partition noise
(iv) Low frequency or flicker noise
(v) High frequency or transit time noise
Shot Noise
It is produced due to shot effect. Due to the shot effect shot noise is produced in all the amplifying devices rather in all the active devices.
The shot noise is produced due to the random variations in the arrival of electronics (or holes) at the output electrode of an amplifying devices.
Therefore, it appears as a randomly varying noise current superimposed and the output. The shot noise “Sounds” like a shower of lead shots falling on a metal sheet.
The shot noise has a uniform spectral density like thermal noise
The mean square shot noise current for a diode is given as
In2 = 2 (J + Io) qB Amp2
Where I = direct current across the junction in amperes
Io = reverse saturation current in ampere
q = electron charge = 1.6 X 10-19 C
B = Effective noise Band width in Hz
Thermal Noise Also known as Johnson Noise.
The free electrons with in a conductor are always in random motion.
This random motion is due to the thermal energy received by them. The distribution of these free electrons with in a conductor at a given instant of time is not uniform.
It is possible that an excess number of electrons may appears at one end or the other of the conductor
The average voltage resulting from this non uniform distribution is zero but the average power is not zero
As this power results from the thermal energy are called as the “Thermal noise power”
The average thermal noise power is given by
Pn = KTB Watts
Where: k = Boltzmann’s constant = 1.38 X 10-23 J/K
B = Bandwidth of the noise spectrum (Hz)
T = Temperature of the conductor in K
The thermal noise power Pn in proportional to the noise BW and conductor temperature
Flicker noise: Also known as low frequency noise
The flicker noise appears at frequencies below a few kHz it is sometimes called as 1/f noise in the semiconductor devices, the flicker noise is generated due to the fluctuations in the carrier density.
These fluctuations in the carrier density will cause the fluctuation in the conductivity of the material. This will produce a fluctuating voltage drop when a direct-current flow through a device this fluctuating voltage is called as flicker noise voltage.
The mean square value of flicker noise voltage is proportional to the square of direct current flowing through the device.
High frequency noise Also called Transit time noise
If the time taken by an electron to travel from the emitter to the collector of a transistor becomes comparable to the period of the signal which is being period of the signal which is being amplified then the transit time effect takes place.
This effect is observed at every high frequency. Due to the transit time effect some of the carriers may diffuse back to the emitter. This gives rise to an input admittance, the conductance component of which increases with frequency.
The minute current induced in the input of the device by the random fluctuations in the output current, will create random noise at high frequencies.
Partition noise- Partition noise is generated when the current gents divided between two or more paths. It is generated due to the random fluctuations in the division.
Therefore, the partition noise in a transistor will be higher than that in a diode.
Noise figure: It is the ratio of the noise power input to noise power output due to source resistance. The noise figure is a quantity which compares the noise in an actual amplifier with that in an ideal (noise less) amplifier. Noise figure is expressed in decibels.
 = Signal power (voltage) input
= Signal power (voltage) input
 = Noise power (voltage) input due to Rs
= Noise power (voltage) input due to Rs
 (
( )= Signal power (voltage) output
)= Signal power (voltage) output
 (
( )= Noise power (voltage output due to Rs and any noise source within the active device
)= Noise power (voltage output due to Rs and any noise source within the active device
Noise figure, 
Where, the power gain of the active devices is

Hence, 
The quotient Sp/Np is called the signal to noise power ratio.
The noise figure is the Input signal to noise signal to noise power ratio

Where:  is called signal to noise Voltage ratio
is called signal to noise Voltage ratio
Losses
An audio sinusoidal generator Vs with source resistance Rs is connected to the input of Q. The active device is cascaded with a low noise amplifier and filter and the output of this system is measured on a true rms reading voltmeter M. The experimental procedure for determining NF is as follows-
i) Measure Rs and calculate Nvi = Vn
Ii) Adjust the audio signal voltage so that it is 10 times the noise voltage
V/s = 10 Vn or Svi = 10 Nvi
Measure the output voltage with M.
A system is used to measure the noise figure of an active device Q.
Large signal to noise ratio, we may neglect the noise and assume that the voltmeter reading gives the signal output voltage Svo
Iii) Set Vs = 0 and measure the output voltage Nvo with M. The low noise amplifier is required only it the noise output of Q is to low to be detected with M.
Friis Formula: This formula was named after Danish American Electrical Engineer Harald T. Friis. His formula is used in tele communications engineering to calculate the signal to noise ratio of a multistage amplifier.
He gave two formulars on relates to noise factor while the other relates to noise temperature.
Friis formula is used to calculate the total noise factor of a cascade of stage each with its own noise factor and power gain.
The total noise factor can then be used to calculate the total noise figure.
The total noise figure is given as

Where Fi and Gi are the noise factor and available power gain respectively of the stage and ‘n’ is the number of stages
Derivation – Let us consider a 3-stage cascaded amplifier that is n=3
A source outputs a signal of power Si and noise of power Ni
Therefore, the SNR at input of the chain

This Si gets amplified by all the 3 amplifiers and the output is given as
S0 = Si G1 G2 G
Using the definition of the Noise factors of the amplifiers we get the final result

Note – Friis formula for noise temperature is given as
Key takeaway
The noise power at the output of the chain consists of following 4 parts
i) Amplified noise i.e., 
Ii) The output noise of first amplifier Na1 which gets further amplified by 2nd and 3rd amplifier i.e., 
Iii) Similarly output noise of 2nd amplifier Na2 amplified by 3rd i.e., 
Iv) Output noise of 3rd amplifier 
Therefore, the total noise power at the output equals

And the NSR at output becomes

The Total noise factor or noise figure may now be calculated as


Numericals:
1) A noise generator using diode is required to produce 15µV noise voltage in a receiver which has an input impedance of 75Ω (Purely resistive). The receiver has a noise power bandwidth of 200KHz calculate the current through the diode.
Sol- Given: Vn = 15µV
R = 75Ω
B = 200 KHz
Noise current flowing through 75Ω is
= 0.2X10-6
= 0.2µa
Diode current –short noise current is given by
I2n = 2 (I +Io) qB
I2n= 2I X Q X B (neglecting Io)
(0.2 X 10-6) 2 = 2I X 1.6 X 10-19 X 200 X 103
I = 0.625 A = 625 µA
2. A receiver has a noise power band width of 12KHz. A register which watches with the receiver input impedance is connected across the antenna terminals what is the noise power contributed by this register in the receiver bandwidth. Assume temperature to be 30ºC
Sol – Given: B = kHz; T = 30ºC = 30+ 273 = 303 K
Pn = KTB
= 1.38 X 10-23 X 303 X 12 X 103
= 5.01768 X 10-17 W
The frequency domain representation of signal makes the analysis simple. The system performance is affected due to presence of these unwanted signals in form of noise. So, to make our study easy we use frequency domain analysis for study of noise. Consider a sample noise signal shown below having interval of T. A periodic noise is generated after T interval. The Fourier Series representation of the signal is given as

Fig 3 Sample noise waveform

 i.e., signal of Fig.3.6.1(b)
i.e., signal of Fig.3.6.1(b)
 assuming that noise signal has no d.c. Component
assuming that noise signal has no d.c. Component
 i.e., period of noise signal
i.e., period of noise signal
The above equation can be written as


The polar form of Fourier series is represented as


 and
and 
By Parseval’s Theorem

The average power P is area under the power spectral density curve
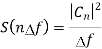
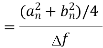
For one component
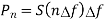

The above equation gives the PSD at frequency component n f where
f where  f = 1/T
f = 1/T
By Fourier Series relation we have


The above equations give the PSD for frequency components n f. The power spectrum is shown below.
f. The power spectrum is shown below.
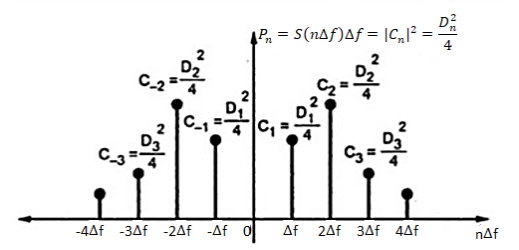
Fig: Power Spectrum
The above derivation was made by assuming noise as a periodic signal. But the fact is noise is never periodic. Now, considering T tends to infinity and  f tends to 0. The actual noise will then be
f tends to 0. The actual noise will then be

The above equation represents noise in frequency domain. The values of constants an and bn are changing as noise is not constant. Hence, they are called random variables of noise, then we write  in place of an and
in place of an and  in place of an.
in place of an.

As  f tends to 0 the discrete spectral lines and power spectrum gets closer and forms continuous spectrum.
f tends to 0 the discrete spectral lines and power spectrum gets closer and forms continuous spectrum.

Key takeaway



The equations derived in above section represents the noise as a superposition of noise spectral components. The frequency of these components is  f and
f and  f tends to 0. The nth noise component can be given as
f tends to 0. The nth noise component can be given as


The spectral components of noise are random processes. The variables an, bn, Dn and ɸn are random variables. As nn(t) is random process the normalised power of nn(t) can be found by taking average of [nn(t)]2.

Substituting value of nn(t) and finding normalised power we get

As nn(t) is stationary process value of 
At time t=t1 cos (2πn ft1) =1 and sin (2πn
ft1) =1 and sin (2πn ft1) =0.
ft1) =0.

At time t=t2 cos (2πn ft1) =0 and sin (2πn
ft1) =0 and sin (2πn ft1) =1.
ft1) =1.


 ]
]

But


The average of multiplication of two terms in above equation is nothing but correlation between them.
Consider two noise components n1(t) and n2(t). Then the total noise due to these components is
n(t) = n1(t)+ n2(t)
This is called superposition.
The normalised power P of these components is given as


The term  represents the cross correlation of n1(t) and n2(t). As individual spectral components of Gaussian noise are uncorrelated hence the correlation of n1(t) and n2(t) will be zero.
represents the cross correlation of n1(t) and n2(t). As individual spectral components of Gaussian noise are uncorrelated hence the correlation of n1(t) and n2(t) will be zero.


Noise has wide range of frequencies. Generally, we use filters to minimize the noise power. These filters are narrow filters and they pass the frequencies of the required signals. The noise power is reduced in the output of the filter. These filters are used before the demodulators in the receivers. The filters used in noise for linear filtering are:
RC-Low Pass Filter
The transfer function of RC filter is given

fc = 3db cut-off frequency of the filters.
Considering ni(t) with PSD of Si(f) and output noise signal be no(t) with PSD of So(f). The output and input PSDs of noise

If the input noise is additive white gaussian noise (AWGN), the PSDs we have,

The magnitude of H(f) can be obtained from
Substituting the values, we get

The equation gives power spectral density of output noise signal. The average power can be obtained from PSD
The expression for output noise power is given as
Let x=f/fc


The average noise power at the output of RC filter is

Ideal Low Pass Filter
The transfer function of ideal LPF is given as


The input and output PSD are given as

The value of average noise power at output is given as

The above equation is the noise power at the output of ideal LPF.
The spectral component of noise is represented as

Another way of representing the noise is shown below

The above equation of noise is also called as narrowband representation of noise because there is narrow frequency band at the neighbour of frequency fo. The quadrature component representation is also used because of the appearance in the equation of sinusoids in quadrature. Let fo corresponds to k=k’ we get
fo =k
The term 2πfot- 2π k t =0 is added to above equation we get
t =0 is added to above equation we get

Using some trigonometric identities for cosine and sine terms we can also write above equation as


The variables nc(t) and ns(t) are stationary random processes represented as linear superposition of spectral components. The narrow band noise can be seen in relation to find out the quadrature component of noise. The noise spectral component in n(t) of frequency f= k gives rise in nc(t) and ns(t) to a spectral component of frequency (k-K)
gives rise in nc(t) and ns(t) to a spectral component of frequency (k-K)  = f-fo
= f-fo
If we assume the noise n(t) is narrow band and extends over bandwidth B and also is selected midway in the frequency range of the noise. The noise spectrum of n(t) extends from fo-B/2 to fo+B/2. The spectrum of nc(t) and ns(t) extends over -B/2 to +B/2. In view of the slow variation of nc(t) and ns(t) relative to the sinusoid of frequency fo it is useful to give the quadrature representation of noise as interpretation in terms of phasors and a phasor diagram. The term nc(t)cos2πfot is of frequency fo and has varying amplitude of nc(t). The term -ns(t)sin2πfot is in quadrature with first term and has slow varying amplitude ns(t). In coordinate system rotating counter-clockwise with angular velocity 2πfo with phasor diagram shown below.
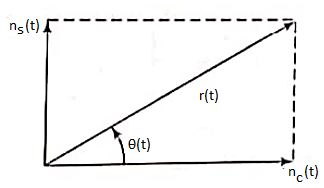
Fig: A phasor diagram of Quadrature representation of noise
The two phasors of varying amplitude give rise to third resultant phasor of amplitude r(t) = [nc2(t)+ns2(t)]1/2
And having angle shown below.

Key takeaway
The quadrature representation is useful in analysis of noise and the phasor representation is useful in angle modulation communication systems.
Gram-Schmidt orthogonalization procedure
In mathematics, particularly linear algebra and numerical analysis, the Gram-Schmidt process is a method for orthogonalizing a set of vectors in an inner product space.
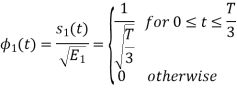
We know that any signal vector can be represented in terms of orthogonal basis functions  . Gram-schmidt orthogonalization procedure is the tool to obtain the orthonormal basis function
. Gram-schmidt orthogonalization procedure is the tool to obtain the orthonormal basis function 
To derive an expression for 
Suppose we have set of ‘M’ energy signals denoted by 
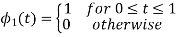
Starting with  chosen from set arbitrarily the basis function is defined by
chosen from set arbitrarily the basis function is defined by

Where  is the energy of the signal
is the energy of the signal  .
.
From question (1), we can write

We know that  for N=1 eq (2) can be written as
for N=1 eq (2) can be written as

From the above equation (3) we obtain  and
and  has unit energy.
has unit energy.
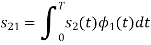
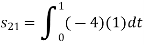
Next, using the signal  we define the co-efficient
we define the co-efficient 
Let  be a new intermediate function which is given as
be a new intermediate function which is given as 
The function is orthogonal to  over the interval 0 to T.
over the interval 0 to T.
The second function, which is given as
 is the energy of
is the energy of 
a) To prove that  has unit energy
has unit energy
Energy of  will be
will be 
We know that 


b) To prove that  and
and  are orthogonal
are orthogonal
Consider 
Substitute the values of  and
and  in the above equation. i.e
in the above equation. i.e
 and
and 

Substitute 


We know that

From the given equation there is a product of two terms  and
and  . But the two symbols are not present at a time. Hence the product of
. But the two symbols are not present at a time. Hence the product of  and
and  . Hence the product of
. Hence the product of  and
and  i.e.,
i.e.,  and hence the integration terms in RHS will be zero. Ie
and hence the integration terms in RHS will be zero. Ie
 . Thus, the noo basis function are orthonormal.
. Thus, the noo basis function are orthonormal.
Generalized equation for orthonormal basis functions
The generalised equation for orthonormal basis function can be written by considering the following equation i.e.
Where is given by the generalized equation
is given by the generalized equation 
Note
 are ready taken consideration.
are ready taken consideration.
Where the coefficients

For  the
the  redues to
redues to 
Given the  we may define the set of ban’s function
we may define the set of ban’s function

Which form an orthogonal set. The dimension ‘N’ is less than or equal to the number of given signals, M depending on one of N0 possibilities.
- The signals
 form a linearly independent set, in which case N=M.
form a linearly independent set, in which case N=M. - The signals
 are not linearly independent.
are not linearly independent.
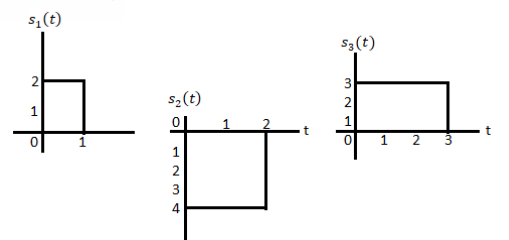
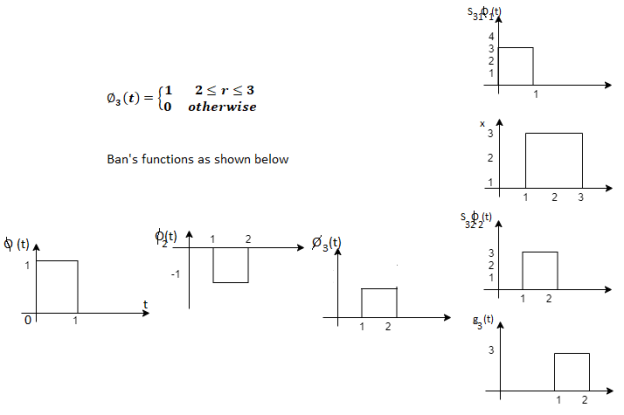
Problem-1
Using the fram-schmidt orthogonalization procedure, find a set of orthonormal ban’s functions represent the tree signals  as shown in figure.
as shown in figure.
Solution
All the three signals  are not linear combination of each other hence they are linearly independent. Hence, we require three ban’s function.
are not linear combination of each other hence they are linearly independent. Hence, we require three ban’s function.
To obtain 
Energy of 
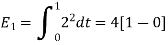

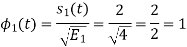
To obtain 








To obtain 











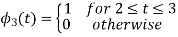
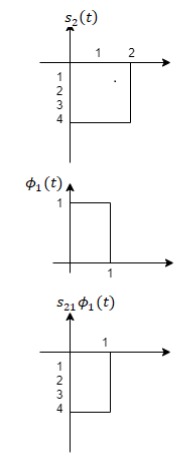
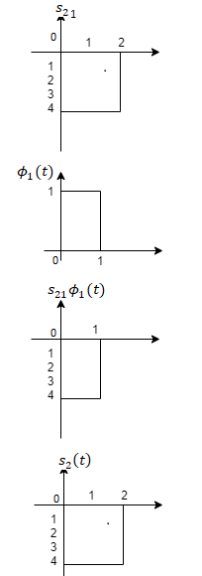
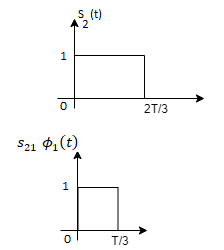
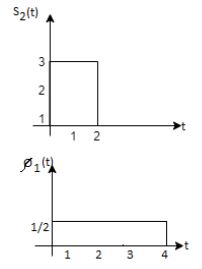
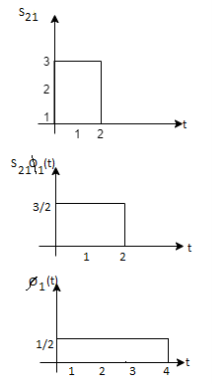
Problem-2
Consider the signals  and
and as given below. Find an orthonormal basis for phase set of signals using Grammar schimdt orthogonalisation procedure.
as given below. Find an orthonormal basis for phase set of signals using Grammar schimdt orthogonalisation procedure.
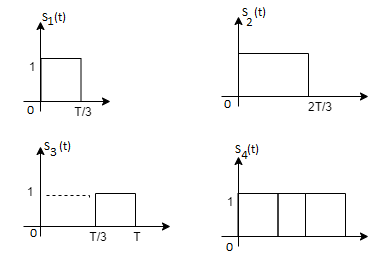
Fig. Sketch of  and
and 
Solution:
From the above figures  . This means all four signals are not linearly independent. Gram-schmidt orthogonalisation procedure is carried out for a subset which is linearly independent. Here
. This means all four signals are not linearly independent. Gram-schmidt orthogonalisation procedure is carried out for a subset which is linearly independent. Here  are linearly independent. Hence, we will determine orthonormal.
are linearly independent. Hence, we will determine orthonormal.
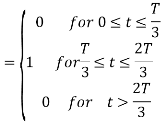
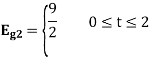
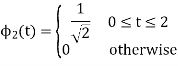
To obtain 
Energy of  is
is 

We know that

To obtain 





From the above figure the intermediate function can be defined as


Energy of  will be
will be


Now
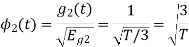
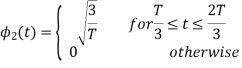
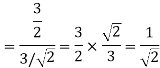
To obtain 
We know that the generalized equation for gramm-scmidt procedure

With N=3


We know that

Since, there is no overlap between  and
and 






Here 
We know that


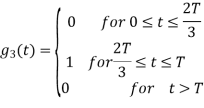
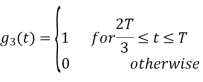
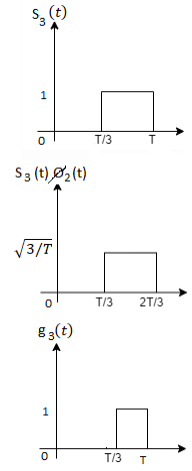




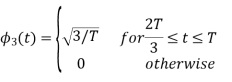
Figure below shows orthonormal basis function
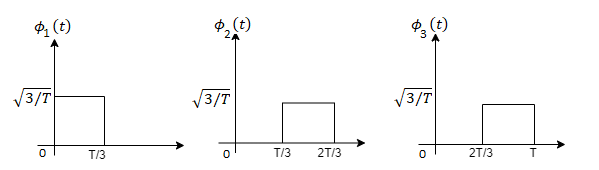
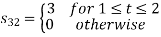
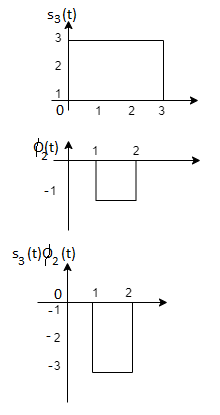
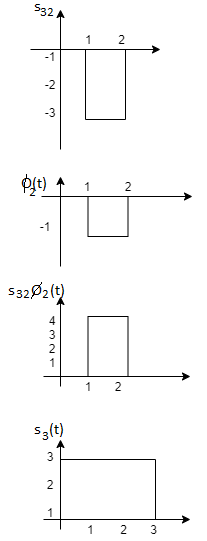
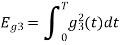
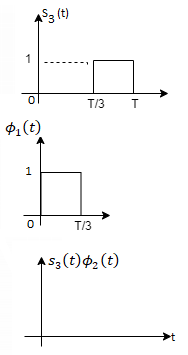
Problem 3:
Three signals  are shown in fig. Apply Gram-schmidt procedure to obtain an orthonormal basis for the signals. Express signals
are shown in fig. Apply Gram-schmidt procedure to obtain an orthonormal basis for the signals. Express signals  in terms of orthonormal basis function.
in terms of orthonormal basis function.
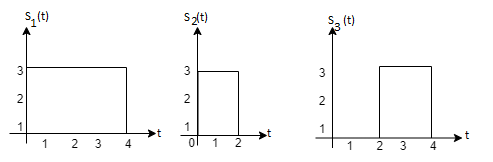
Solution
i) To obtain orthonormal basis function
Here 
Hence, we will obtain basis solution for  and
and  only.
only.
To obtain 
Energy of  is
is 


We know that

To obtain 








References:
1. Bernard Sklar, Prabitra Kumar Ray, “Digital Communications Fundamentals and Applications”, Pearson Education, 2nd Edition
2. Wayne Tomasi, “Electronic Communications System”, Pearson Education, 5th Edition
3. A.B Carlson, P B Crully, J C Rutledge, “Communication Systems”, Tata McGraw Hill Publication, 5th Edition
4. Simon Haykin, “Communication Systems”, John Wiley & Sons, 4th Edition
5. Simon Haykin, “Digital Communication Systems”, John Wiley & Sons, 4th Edition.




