Unit - 2
Process Scheduling
Process
A process is basically a program in execution. The execution of a process must progress in a sequential fashion.
A process is defined as an entity which represents the basic unit of work to be implemented in the system.
To put it in simple terms, we write our computer programs in a text file and when we execute this program, it becomes a process which performs all the tasks mentioned in the program.
When a program is loaded into the memory and it becomes a process, it can be divided into four sections ─ stack, heap, text and data. The following image shows a simplified layout of a process inside main memory −
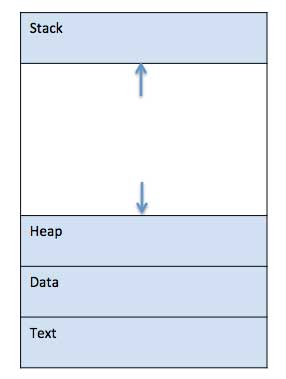
Fig 1 - A simplified layout of a process inside main memory
S.N. | Component & Description |
1 | Stack The process Stack contains the temporary data such as method/function parameters, return address and local variables. |
2 | Heap This is dynamically allocated memory to a process during its run time. |
3 | Text This includes the current activity represented by the value of Program Counter and the contents of the processor's registers. |
4 | Data This section contains the global and static variables. |
Program
A program is a piece of code which may be a single line or millions of lines. A computer program is usually written by a computer programmer in a programming language. For example, here is a simple program written in C programming language −
#include <stdio.h>
Int main() {
printf("Hello, World! \n");
return 0;
}
A computer program is a collection of instructions that performs a specific task when executed by a computer. When we compare a program with a process, we can conclude that a process is a dynamic instance of a computer program.
A part of a computer program that performs a well-defined task is known as an algorithm. A collection of computer programs, libraries and related data are referred to as a software.
Process Life Cycle
When a process executes, it passes through different states. These stages may differ in different operating systems, and the names of these states are also not standardized.
In general, a process can have one of the following five states at a time.
S.N. | State & Description |
1 | Start This is the initial state when a process is first started/created. |
2 | Ready The process is waiting to be assigned to a processor. Ready processes are waiting to have the processor allocated to them by the operating system so that they can run. Process may come into this state after Start state or while running it by but interrupted by the scheduler to assign CPU to some other process. |
3 | Running Once the process has been assigned to a processor by the OS scheduler, the process state is set to running and the processor executes its instructions. |
4 | Waiting Process moves into the waiting state if it needs to wait for a resource, such as waiting for user input, or waiting for a file to become available. |
5 | Terminated or Exit Once the process finishes its execution, or it is terminated by the operating system, it is moved to the terminated state where it waits to be removed from main memory. |
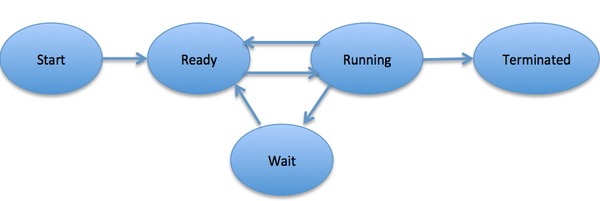
Fig 2 – Process state
A Process Control Block is a data structure maintained by the Operating System for every process. The PCB is identified by an integer process ID (PID). A PCB keeps all the information needed to keep track of a process as listed below in the table −
S.N. | Information & Description |
1 | Process State The current state of the process i.e., whether it is ready, running, waiting, or whatever. |
2 | Process privileges This is required to allow/disallow access to system resources. |
3 | Process ID Unique identification for each of the process in the operating system. |
4 | Pointer A pointer to parent process. |
5 | Program Counter Program Counter is a pointer to the address of the next instruction to be executed for this process. |
6 | CPU registers Various CPU registers where process need to be stored for execution for running state. |
7 | CPU Scheduling Information Process priority and other scheduling information which is required to schedule the process. |
8 | Memory management information This includes the information of page table, memory limits, Segment table depending on memory used by the operating system. |
9 | Accounting information This includes the amount of CPU used for process execution, time limits, execution ID etc. |
10 | IO status information This includes a list of I/O devices allocated to the process. |
The architecture of a PCB is completely dependent on Operating System and may contain different information in different operating systems. Here is a simplified diagram of a PCB −
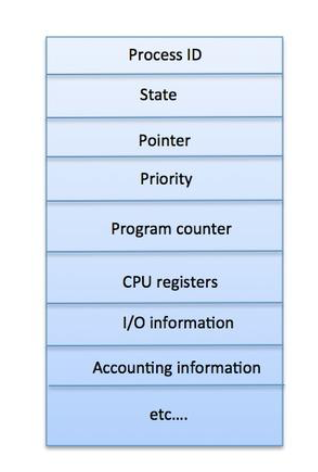
Fig 3: PCB
Key takeaway
A process is basically a program in execution. The execution of a process must progress in a sequential fashion.
A process is defined as an entity which represents the basic unit of work to be implemented in the system.
To put it in simple terms, we write our computer programs in a text file and when we execute this program, it becomes a process which performs all the tasks mentioned in the program.
Definition
The process scheduling is the activity of the process manager that handles the removal of the running process from the CPU and the selection of another process on the basis of a particular strategy.
Process scheduling is an essential part of a Multiprogramming operating systems. Such operating systems allow more than one process to be loaded into the executable memory at a time and the loaded process shares the CPU using time multiplexing.
Process Scheduling Queues
The OS maintains all PCBs in Process Scheduling Queues. The OS maintains a separate queue for each of the process states and PCBs of all processes in the same execution state are placed in the same queue. When the state of a process is changed, its PCB is unlinked from its current queue and moved to its new state queue.
The Operating System maintains the following important process scheduling queues −
- Job queue − This queue keeps all the processes in the system.
- Ready queue − This queue keeps a set of all processes residing in main memory, ready and waiting to execute. A new process is always put in this queue.
- Device queues − The processes which are blocked due to unavailability of an I/O device constitute this queue.
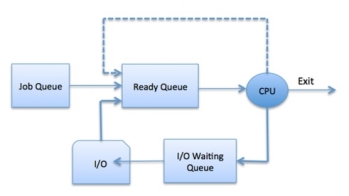
Fig 4 – Process state
The OS can use different policies to manage each queue (FIFO, Round Robin, Priority, etc.). The OS scheduler determines how to move processes between the ready and run queues which can only have one entry per processor core on the system; in the above diagram, it has been merged with the CPU.
Two-State Process Model
Two-state process model refers to running and non-running states which are described below −
S.N. | State & Description |
1 | Running When a new process is created, it enters into the system as in the running state. |
2 | Not Running Processes that are not running are kept in queue, waiting for their turn to execute. Each entry in the queue is a pointer to a particular process. Queue is implemented by using linked list. Use of dispatcher is as follows. When a process is interrupted, that process is transferred in the waiting queue. If the process has completed or aborted, the process is discarded. In either case, the dispatcher then selects a process from the queue to execute. |
Schedulers
Schedulers are special system software which handle process scheduling in various ways. Their main task is to select the jobs to be submitted into the system and to decide which process to run. Schedulers are of three types −
- Long-Term Scheduler
- Short-Term Scheduler
- Medium-Term Scheduler
Long Term Scheduler
It is also called a job scheduler. A long-term scheduler determines which programs are admitted to the system for processing. It selects processes from the queue and loads them into memory for execution. Process loads into the memory for CPU scheduling.
The primary objective of the job scheduler is to provide a balanced mix of jobs, such as I/O bound and processor bound. It also controls the degree of multiprogramming. If the degree of multiprogramming is stable, then the average rate of process creation must be equal to the average departure rate of processes leaving the system.
On some systems, the long-term scheduler may not be available or minimal. Time-sharing operating systems have no long-term scheduler. When a process changes the state from new to ready, then there is use of long-term scheduler.
Short Term Scheduler
It is also called as CPU scheduler. Its main objective is to increase system performance in accordance with the chosen set of criteria. It is the change of ready state to running state of the process. CPU scheduler selects a process among the processes that are ready to execute and allocates CPU to one of them.
Short-term schedulers, also known as dispatchers, make the decision of which process to execute next. Short-term schedulers are faster than long-term schedulers.
Medium Term Scheduler
Medium-term scheduling is a part of swapping. It removes the processes from the memory. It reduces the degree of multiprogramming. The medium-term scheduler is in-charge of handling the swapped out-processes.
A running process may become suspended if it makes an I/O request. A suspended process cannot make any progress towards completion. In this condition, to remove the process from memory and make space for other processes, the suspended process is moved to the secondary storage. This process is called swapping, and the process is said to be swapped out or rolled out. Swapping may be necessary to improve the process mix.
Comparison among Scheduler
S.N. | Long-Term Scheduler | Short-Term Scheduler | Medium-Term Scheduler |
1 | It is a job scheduler | It is a CPU scheduler | It is a process swapping scheduler. |
2 | Speed is lesser than short term scheduler | Speed is fastest among other two | Speed is in between both short- and long-term scheduler. |
3 | It controls the degree of multiprogramming | It provides lesser control over degree of multiprogramming | It reduces the degree of multiprogramming. |
4 | It is almost absent or minimal in time sharing system | It is also minimal in time sharing system | It is a part of Time-sharing systems. |
5 | It selects processes from pool and loads them into memory for execution | It selects those processes which are ready to execute | It can re-introduce the process into memory and execution can be continued. |
Key takeaway
The process scheduling is the activity of the process manager that handles the removal of the running process from the CPU and the selection of another process on the basis of a particular strategy.
Process scheduling is an essential part of a Multiprogramming operating systems. Such operating systems allow more than one process to be loaded into the executable memory at a time and the loaded process shares the CPU using time multiplexing.
The Context switching is a technique or method used by the operating system to switch a process from one state to another to execute its function using CPUs in the system. When switching perform in the system, it stores the old running process's status in the form of registers and assigns the CPU to a new process to execute its tasks. While a new process is running in the system, the previous process must wait in a ready queue. The execution of the old process starts at that point where another process stopped it. It defines the characteristics of a multitasking operating system in which multiple processes shared the same CPU to perform multiple tasks without the need for additional processors in the system.
The need for Context switching
A context switching helps to share a single CPU across all processes to complete its execution and store the system's tasks status. When the process reloads in the system, the execution of the process starts at the same point where there is conflicting.
Following are the reasons that describe the need for context switching in the Operating system.
- The switching of one process to another process is not directly in the system. A context switching helps the operating system that switches between the multiple processes to use the CPU's resource to accomplish its tasks and store its context. We can resume the service of the process at the same point later. If we do not store the currently running process's data or context, the stored data may be lost while switching between processes.
- If a high priority process falls into the ready queue, the currently running process will be shut down or stopped by a high priority process to complete its tasks in the system.
- If any running process requires I/O resources in the system, the current process will be switched by another process to use the CPUs. And when the I/O requirement is met, the old process goes into a ready state to wait for its execution in the CPU. Context switching stores the state of the process to resume its tasks in an operating system. Otherwise, the process needs to restart its execution from the initials level.
- If any interrupts occur while running a process in the operating system, the process status is saved as registers using context switching. After resolving the interrupts, the process switches from a wait state to a ready state to resume its execution at the same point later, where the operating system interrupted occurs.
- A context switching allows a single CPU to handle multiple process requests simultaneously without the need for any additional processors.
Example of Context Switching
Suppose that multiple processes are stored in a Process Control Block (PCB). One process is running state to execute its task with the use of CPUs. As the process is running, another process arrives in the ready queue, which has a high priority of completing its task using CPU. Here we used context switching that switches the current process with the new process requiring the CPU to finish its tasks. While switching the process, a context switch saves the status of the old process in registers. When the process reloads into the CPU, it starts the execution of the process when the new process stops the old process. If we do not save the state of the process, we have to start its execution at the initial level. In this way, context switching helps the operating system to switch between the processes, store or reload the process when it requires executing its tasks.
Context switching triggers
Following are the three types of context switching triggers as follows.
- Interrupts
- Multitasking
- Kernel/User switch
Interrupts: A CPU requests for the data to read from a disk, and if there are any interrupts, the context switching automatic switches a part of the hardware that requires less time to handle the interrupts.
Multitasking: A context switching is the characteristic of multitasking that allows the process to be switched from the CPU so that another process can be run. When switching the process, the old state is saved to resume the process's execution at the same point in the system.
Kernel/User Switch: It is used in the operating systems when switching between the user mode, and the kernel/user mode is performed.
What is the PCB?
A PCB (Process Control Block) is a data structure used in the operating system to store all data related information to the process. For example, when a process is created in the operating system, updated information of the process, switching information of the process, terminated process in the PCB.
Steps for Context Switching
There are several steps involves in context switching of the processes. The following diagram represents the context switching of two processes, P1 to P2, when an interrupt, I/O needs, or priority-based process occurs in the ready queue of PCB.
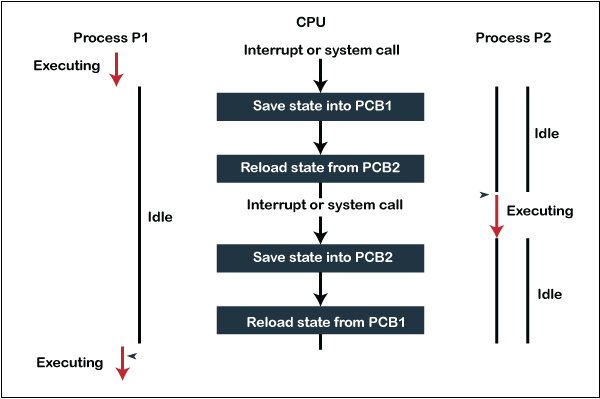
Fig 5 - The context switching of two processes
As we can see in the diagram, initially, the P1 process is running on the CPU to execute its task, and at the same time, another process, P2, is in the ready state. If an error or interruption has occurred or the process requires input/output, the P1 process switches its state from running to the waiting state. Before changing the state of the process P1, context switching saves the context of the process P1 in the form of registers and the program counter to the PCB1. After that, it loads the state of the P2 process from the ready state of the PCB2 to the running state.
The following steps are taken when switching Process P1 to Process 2:
- First, this context switching needs to save the state of process P1 in the form of the program counter and the registers to the PCB (Program Counter Block), which is in the running state.
- Now update PCB1 to process P1 and moves the process to the appropriate queue, such as the ready queue, I/O queue and waiting queue.
- After that, another process gets into the running state, or we can select a new process from the ready state, which is to be executed, or the process has a high priority to execute its task.
- Now, we have to update the PCB (Process Control Block) for the selected process P2. It includes switching the process state from ready to running state or from another state like blocked, exit, or suspend.
- If the CPU already executes process P2, we need to get the status of process P2 to resume its execution at the same time point where the system interrupt occurs.
Similarly, process P2 is switched off from the CPU so that the process P1 can resume execution. P1 process is reloaded from PCB1 to the running state to resume its task at the same point. Otherwise, the information is lost, and when the process is executed again, it starts execution at the initial level.
Key takeaway
The Context switching is a technique or method used by the operating system to switch a process from one state to another to execute its function using CPUs in the system. When switching perform in the system, it stores the old running process's status in the form of registers and assigns the CPU to a new process to execute its tasks. While a new process is running in the system, the previous process must wait in a ready queue. The execution of the old process starts at that point where another process stopped it. It defines the characteristics of a multitasking operating system in which multiple processes shared the same CPU to perform multiple tasks without the need for additional processors in the system.
There is the way of thread execution within the method of any software. With the exception of this, there may be quite one thread within a method. Thread is usually cited as a light-weight method.
The process may be reduction into such a big amount of threads. For instance, in an exceedingly browser, several tabs may be viewed as threads. MS Word uses several threads - data format text from one thread, process input from another thread, etc.
Types of Threads
In the software, there square measure 2 sorts of threads.
- Kernel level thread.
- User-level thread.
User-level thread
The software doesn't acknowledge the user-level thread. User threads may be simply enforced and it's enforced by the user. If a user performs a user-level thread obstruction operation, the complete method is blocked. The kernel level thread doesn't unskilled person regarding the user level thread. The kernel-level thread manages user-level threads as if they're single-threaded processes? Examples: Java thread, POSIX threads, etc.
Advantages of User-level threads
- The user threads may be simply enforced than the kernel thread.
- User-level threads may be applied to such sorts of in operation systems that don't support threads at the kernel-level.
- It's quicker and economical.
- Context switch time is shorter than the kernel-level threads.
- It doesn't need modifications of the software.
- User-level threads illustration is extremely easy. The register, PC, stack, and mini thread management blocks square measure hold on within the address house of the user-level method.
- It's easy to form, switch, and synchronize threads while not the intervention of the method.
Disadvantages of User-level threads
- User-level threads lack coordination between the thread and therefore the kernel.
- If a thread causes a page fault, the whole method is blocked.
Kernel level thread
The kernel thread acknowledges the software. There square measure a thread management block and method management block within the system for every thread and method within the kernel-level thread. The kernel-level thread is enforced by the software. The kernel is aware of regarding all the threads and manages them. The kernel-level thread offers a supervisor call instruction to form and manage the threads from user-space. The implementation of kernel threads is troublesome than the user thread. Context switch time is longer within the kernel thread. If a kernel thread performs a obstruction operation, the Banky thread execution will continue. Example: Window Solaris.
Advantages of Kernel-level threads
- The kernel-level thread is totally tuned in to all threads.
- The hardware might conceive to pay additional time within the process of threads being giant numerical.
- The kernel-level thread is nice for those applications that block the frequency.
Disadvantages of Kernel-level threads
- The kernel thread manages and schedules all threads.
- The implementation of kernel threads is troublesome than the user thread.
- The kernel-level thread is slower than user-level threads.
Components of Threads
Any thread has the subsequent parts.
- Program counter
- Register set
- Stack house
Benefits of Threads
- Enhanced outturn of the system: once the method is split into several threads, and every thread is treated as employment, the quantity of jobs worn out the unit time will increase. That's why the outturn of the system additionally will increase.
- Effective Utilization of digital computer system: after you have quite one thread in one method, you'll be able to schedule quite one thread in additional than one processor.
- Faster context switch: The context shift amount between threads is a smaller amount than the method context shift. The method context switch suggests that additional overhead for the hardware.
- Responsiveness: once the method is split into many threads, and once a thread completes its execution, that method may be suffered as before long as doable.
- Communication: Multiple-thread communication is easy as a result of the threads share an equivalent address house, whereas in method, we have a tendency to adopt simply some exclusive communication methods for communication between 2 processes.
- Resource sharing: Resources may be shared between all threads at intervals a method, like code, data, and files. Note: The stack and register can't be shared between threads. There square measure a stack and register for every thread.
Thread State Diagram
Appearing on your screen may be a thread state diagram. Let's take a more in-depth explore the various states showing on the diagram.
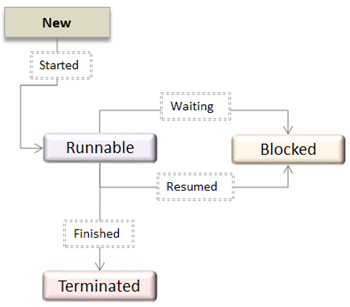
Fig 6 - OS Thread State Diagram
A thread is within the new state once it's been created. It does not take any hardware resources till it's really running. Now, the method is taking on hardware resources as a result of it's able to run. However, it's in an exceedingly runnable state as a result of it might be looking forward to another thread to run and then it's to attend for its flip.
A thread that isn't allowed to continue remains in an exceedingly blocked state. Parenthetically that a thread is looking forward to input/output (I/O), however it ne'er gets those resources, therefore it'll stay in an exceedingly blocked state. The great news is that a blocked thread will not use hardware resources. The thread is not stopped forever. For instance, if you permit emergency vehicles to pass, it doesn't mean that you just square measure forever barred from your final destination. Similarly, those threads (emergency vehicles) that have the next priority square measure processed prior to you. If a thread becomes blocked, another thread moves to the front of the road. However, this is often accomplished is roofed within the next section regarding programming and context shift.
Finally, a thread is terminated if it finishes a task with success or abnormally. At this time, no hardware resources square measure used.
Difference between User-Level & Kernel-Level Thread
S.N. | User-Level Threads | Kernel-Level Thread |
1 | User-level threads are faster to create and manage. | Kernel-level threads are slower to create and manage. |
2 | Implementation is by a thread library at the user level. | Operating system supports creation of Kernel threads. |
3 | User-level thread is generic and can run on any operating system. | Kernel-level thread is specific to the operating system. |
4 | Multi-threaded applications cannot take advantage of multiprocessing. | Kernel routines themselves can be multithreaded. |
Key takeaway
There is a way of thread execution inside the process of any operating system. Apart from this, there can be more than one thread inside a process. Thread is often referred to as a lightweight process.
The process can be split down into so many threads. For example, in a browser, many tabs can be viewed as threads. MS Word uses many threads - formatting text from one thread, processing input from another thread, etc.
Some operating system provides a combined user level thread and Kernel level thread facility. Solaris is a good example of this combined approach. In a combined system, multiple threads within the same application can run in parallel on multiple processors and a blocking system call need not block the entire process. Multithreading models are three types
- Many to many relationship.
- Many to one relationship.
- One to one relationship.
Many to Many Model
The many-to-many model multiplexes any number of user threads onto an equal or smaller number of kernel threads.
The following diagram shows the many-to-many threading model where 6 user level threads are multiplexing with 6 kernel level threads. In this model, developers can create as many user threads as necessary and the corresponding Kernel threads can run in parallel on a multiprocessor machine. This model provides the best accuracy on concurrency and when a thread performs a blocking system call, the kernel can schedule another thread for execution.
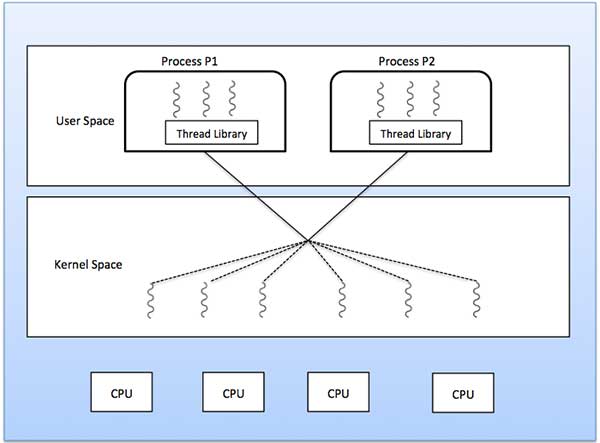
Fig 7 - The best accuracy on concurrency
Many to One Model
Many-to-one model maps many users level threads to one Kernel-level thread. Thread management is done in user space by the thread library. When thread makes a blocking system call, the entire process will be blocked. Only one thread can access the Kernel at a time, so multiple threads are unable to run in parallel on multiprocessors.
If the user-level thread libraries are implemented in the operating system in such a way that the system does not support them, then the Kernel threads use the many-to-one relationship modes.
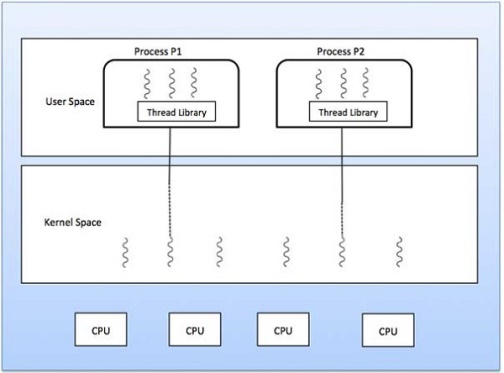
Fig 8 – Many to one model
One to One Model
There is one-to-one relationship of user-level thread to the kernel-level thread. This model provides more concurrency than the many-to-one model. It also allows another thread to run when a thread makes a blocking system call. It supports multiple threads to execute in parallel on microprocessors.
Disadvantage of this model is that creating user thread requires the corresponding Kernel thread. OS/2, windows NT and windows 2000 use one to one relationship model.
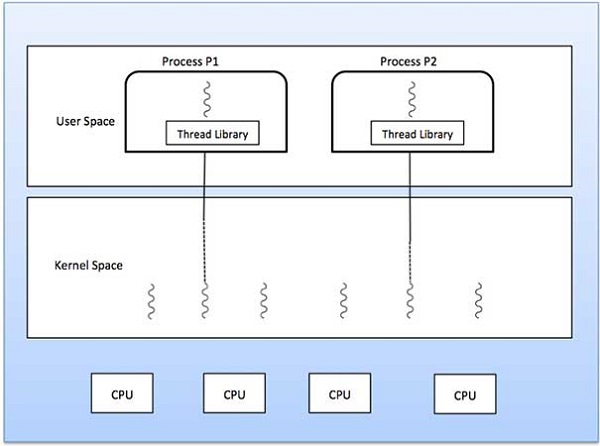
Fig 9 – One to one model
A Process Scheduler schedules different processes to be assigned to the CPU based on particular scheduling algorithms. There are six popular process scheduling algorithms which we are going to discuss in this chapter −
- First-Come, First-Served (FCFS) Scheduling
- Shortest-Job-Next (SJN) Scheduling
- Priority Scheduling
- Shortest Remaining Time
- Round Robin (RR) Scheduling
- Multiple-Level Queues Scheduling
These algorithms are either non-pre-emptive or pre-emptive. Non-pre-emptive algorithms are designed so that once a process enters the running state, it cannot be pre-empted until it completes its allotted time, whereas the pre-emptive scheduling is based on priority where a scheduler may pre-empt a low priority running process anytime when a high priority process enters into a ready state.
First Come First Serve (FCFS)
- Jobs are executed on first come, first serve basis.
- It is a non-pre-emptive, pre-emptive scheduling algorithm.
- Easy to understand and implement.
- Its implementation is based on FIFO queue.
- Poor in performance as average wait time is high.
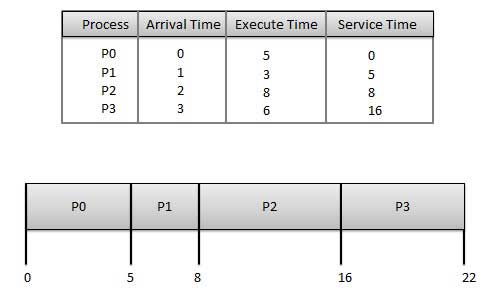
Wait time of each process is as follows −
Process | Wait Time: Service Time - Arrival Time |
P0 | 0 - 0 = 0 |
P1 | 5 - 1 = 4 |
P2 | 8 - 2 = 6 |
P3 | 16 - 3 = 13 |
Average Wait Time: (0+4+6+13) / 4 = 5.75
Shortest Job Next (SJN)
- This is also known as shortest job first, or SJF
- This is a non-pre-emptive, pre-emptive scheduling algorithm.
- Best approach to minimize waiting time.
- Easy to implement in Batch systems where required CPU time is known in advance.
- Impossible to implement in interactive systems where required CPU time is not known.
- The processer should know in advance how much time process will take.
Given: Table of processes, and their Arrival time, Execution time
Process | Arrival Time | Execution Time | Service Time |
P0 | 0 | 5 | 0 |
P1 | 1 | 3 | 5 |
P2 | 2 | 8 | 14 |
P3 | 3 | 6 | 8 |
Waiting time of each process is as follows −
Process | Waiting Time |
P0 | 0 - 0 = 0 |
P1 | 5 - 1 = 4 |
P2 | 14 - 2 = 12 |
P3 | 8 - 3 = 5 |
Average Wait Time: (0 + 4 + 12 + 5)/4 = 21 / 4 = 5.25
Priority Based Scheduling
- Priority scheduling is a non-pre-emptive algorithm and one of the most common scheduling algorithms in batch systems.
- Each process is assigned a priority. Process with highest priority is to be executed first and so on.
- Processes with same priority are executed on first come first served basis.
- Priority can be decided based on memory requirements, time requirements or any other resource requirement.
Given: Table of processes, and their Arrival time, Execution time, and priority. Here we are considering 1 is the lowest priority.
Process | Arrival Time | Execution Time | Priority | Service Time |
P0 | 0 | 5 | 1 | 0 |
P1 | 1 | 3 | 2 | 11 |
P2 | 2 | 8 | 1 | 14 |
P3 | 3 | 6 | 3 | 5 |
Waiting time of each process is as follows −
Process | Waiting Time |
P0 | 0 - 0 = 0 |
P1 | 11 - 1 = 10 |
P2 | 14 - 2 = 12 |
P3 | 5 - 3 = 2 |
Average Wait Time: (0 + 10 + 12 + 2)/4 = 24 / 4 = 6
Shortest Remaining Time
- Shortest remaining time (SRT) is the pre-emptive version of the SJN algorithm.
- The processor is allocated to the job closest to completion but it can be pre-empted by a newer ready job with shorter time to completion.
- Impossible to implement in interactive systems where required CPU time is not known.
- It is often used in batch environments where short jobs need to give preference.
Round Robin Scheduling
- Round Robin is the pre-emptive process scheduling algorithm.
- Each process is provided a fix time to execute, it is called a quantum.
- Once a process is executed for a given time period, it is pre-empted and other process executes for a given time period.
- Context switching is used to save states of pre-empted processes.
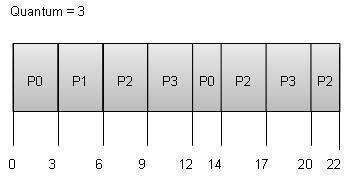
Wait time of each process is as follows −
Process | Wait Time: Service Time - Arrival Time |
P0 | (0 - 0) + (12 - 3) = 9 |
P1 | (3 - 1) = 2 |
P2 | (6 - 2) + (14 - 9) + (20 - 17) = 12 |
P3 | (9 - 3) + (17 - 12) = 11 |
Average Wait Time: (9+2+12+11) / 4 = 8.5
Multiple-Level Queues Scheduling
Multiple-level queues are not an independent scheduling algorithm. They make use of other existing algorithms to group and schedule jobs with common characteristics.
- Multiple queues are maintained for processes with common characteristics.
- Each queue can have its own scheduling algorithms.
- Priorities are assigned to each queue.
For example, CPU-bound jobs can be scheduled in one queue and all I/O-bound jobs in another queue. The Process Scheduler then alternately selects jobs from each queue and assigns them to the CPU based on the algorithm assigned to the queue.
Key takeaway
A Process Scheduler schedules different processes to be assigned to the CPU based on particular scheduling algorithms. There are six popular process scheduling algorithms which we are going to discuss in this chapter −
- First-Come, First-Served (FCFS) Scheduling
- Shortest-Job-Next (SJN) Scheduling
- Priority Scheduling
- Shortest Remaining Time
- Round Robin (RR) Scheduling
- Multiple-Level Queues Scheduling
References:
1. Operating Systems (5th Ed) - Internals and Design Principles by William Stallings, Prentice Hall India, 2000.
2. Operating System: Concepts and Design by Milan Milenkovik, McGraw Hill Higher Education.
3. Operating Systems - 3rd Edition by Gary Nutt, Pearson Education.
4. Operating Systems, 3rd Edition by P. Balakrishna Prasad, SciTech Publications.




