Electromagnetic Spectrum: -
The electromagnetic spectrum is made up of following waves such as
- radio waves,
- microwaves,
- infrared waves,
- visible light,
- ultraviolet light, and
- even X-rays and gamma rays
all electromagnetic waves can travel through empty space. Unlike sound waves or water waves, EM waves do not require medium to travel through them. This is important, because EM waves could not travel through empty space, then the light and heat from the Sun would not be able to reach in ground surface.
EM waves travel very quickly. In fact, nothing in the universe is faster than electromagnetic wave. The speed at which these waves travel through empty space has been about 3x108 m/s, which means that an EM wave could travel all the way around the Earth about 8 times in a single second. light travels so fast and quick that it reaches the Earth surface at eight minutes after it leaves the Sun.
Electromagnetic waves can be divided and arranged according to their different wavelengths or frequenciy and this classification is called as the electromagnetic spectrum.
| |
|
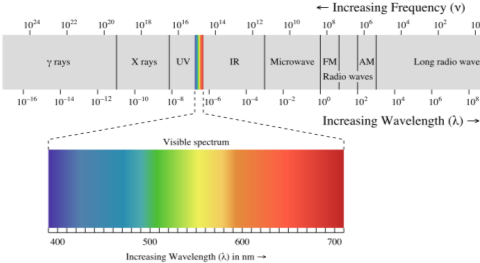
all electromagnetic waves travel extremely fast through a vacuum, they differ mainly in their wavelength and frequency.
The frequency of a wave is the number of times it repeats in one second, and frequency is measured in terms of Hertz (1 Hz = 1 cycle/second).
The wavelength is the distance between successive wave peaks. For electromagnetic waves, wavelength is termed in units of nanometers (nm).
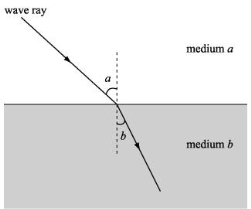
Interaction of electromagnetic radiation with the atmosphere and earth surface:-
All wave used for remote sensing passes through the atmosphere before and after it has interacted with the Earth's surface. atmosphere changes the wave or radiation's frequency, intensity, and direction. Radiance measured by an air- or space-borne sensor is affected by various factors, not solely diffuse sky irradiance between the sensor and the target on the ground surface. The atmosphere generally affects the visible and infra-red wavelengths and has more minor effects on microwave wavelength.
There are three physical processes involved:
- Scattering, - it changes the direction and intensity of wave
- Absorption, - in which incident wave is retained by constituent parts of the atmosphere, reducing its intensity.
- Refraction, - it changes the direction of wave as it passes through the atmosphere
Atmospheric Refraction. |
|
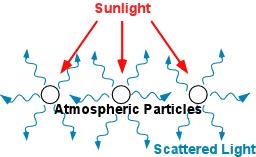
Scattering
Scattering is the changing or redirection of EM radiation by particles present in the atmosphere. The amount of scattering depends upon the size of the particles present over the atmosphere.the abundance of particles, the wavelength of the electromagnetic radiation, and the depth of the atmosphere all are the factor which governs the scattering.
There are four main types of scattering: -
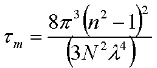
- Rayleigh scattering (Rayleigh scattering was discovered by Lord Rayleigh in 1890s, for which he gets the Nobel Prize in Physics in 1904.)
This type of scattering is caused by gases in the upper atmosphere, or by particles that are smaller than the wavelength of the wave. As shown by the equation below, the degree of scattering is inversely proportional to the fourth power of wavelength (λ )
|
- Mie Scattering
- Non-selective scattering
- Raman scattering
Remote sensing platforms
Remote sensing platforms can be defined as the structures on which remote sensing instruments that is sensor are placed. For the applications of remote sensing, sensors should be placed on suitable stable platforms. These platforms can be called as: -
- ground based,
- air borne and
- space borne based.
if platform or vehicles height increases then the spatial resolution and observational area also increases. Thus, higher the sensor is place larger is the spatial resolution
The characteristics of platform depend on the type of sensor to be attached and its application.
Types of platforms: -
1.Ground-borneplatforms:
It is used to record detailed information about the ground surface which is compared with information collected from aircraft or satellite sensors. Ground observation includes both the laboratory and field study, used for both in designing sensors and identification and types of land features.
Ground observation platforms include –handheld platform, cherry picker, towers, portable masts and vehicles etc.
spectroradiometers and Portable handheld photographic cameras are largely used in laboratory
2.Air-borne platforms:
Is is used to collect detailed images and to facilitate the collection of data over virtually any portion of the ground surface at any time. Airborne platforms were the main non-ground-based platforms for early remote sensing work application.
Balloon: -
Balloons are used for remote sensing observation generally for the aerial photography and. The first aerial images captured aloft by a balloon in 1859.
Balloon floats at a constant height of about 30 km. The balloon is control by the wind at the floating height. This technique is rarely used today because they are not very stable
Drone: -
Drone is a miniature remotely piloted aircraft. It is designed for a low cost vehicles or platform.
Drone includes equipment of photography, infrared findion, radar observation and TV surveillance. Drone uses satellite communication link. An onboard computer controls the payload and stores data from different sensors and instruments. it was developed in Britain during World War-II, now it plays important role in remote sensing.
The different advantage is that it could be easily located above the area and it is capable to provide both night and day data.
Aircraft
aircraft with cameras and sensors used to capture the aerial photographs and images of ground surface features. While low altitude aerial photography results in large scale images providing detailed information on the terrain, the high altitude smaller scale images offer advantage to cover a larger area with low spatial resolution.
Multi spectral, hyperspectral and microwave imaging is also done by aircraft.
Aircraft platforms offer an economical method of remote sensing data collection for small to large areas with different tools such as cameras, electronic imagers, across-track and along-track scanners, and scanners.
The AVIRIS hyperspectral imaging is famous and widely used aircraft aerial photographic operation.
High Altitude Sounding Rockets
Balloons have a maximum altitude of approx 37 km, while satellites cannot orbit below 120 km. High altitude sounding rockets is used to moderate altitude above terrain. Imageries with moderate synoptic view can be obtained from such rockets for areas of some 500,000 square kilometers per frame.
high altitude sounding rocket is controlled from a mobile launcher. During the flight its scanning work is done from a stable altitude.
3.Space-borne platforms:
In this platforms, sensors are placed on-board a spacecraft orbiting the earth. Space-borne which is also called as satellite platform are onetime cost investment but relatively lower cost per unit area of coverage, can cover imager of entire earth . the imaging ranges for space borne platforms are from altitude 250 km to 36000 km.
Spaceborne remote sensing provides the following advantages:
it coverage Large area;
Frequent and repetitive coverage of an area
; processing and analysis is done by Semi-automated computerized
cost is low for unit area of coverage.
There are two types of well recognized satellite platforms-manned satellite platform and unmanned satellite platform.
Imaging Systems (Sensors): -
Remote Sensing
- Remote Sensing is defined as the collecting information of an object without making physical contact with object specially in the earth.
- It works on the principle of radiation when waves i.e. electromagnetic radiation from sun after meeting or interaction with atmosphere and surface of earth is detected by sensor and it makes or stored as image data.
Remote sensing systems which measure energy that is naturally available are called passive sensors. Passive sensors are only used to find energy when the naturally occurring energy is presentl over there.
Active sensors rely on their own sources of radiation for illuminating objects. The sensor emits radiation towards the target to be investigated. Then the reflected energy from that target is find out and measured by sensor.
EM energy may be find either by photographically or electronically and the images produced by analog or digital. examples of analog images are Aerial photographs while examples of digital images are satellite images acquired using electronic sensors
A digital image comprises of a two dimensional array of individual picture elements (pixels) arranged in columns and rows. Each pixel represents an area on the Earth's surface. The intensity value represents the measured physical quantity such as the solar radiance in a given wavelength band reflected from the ground, emitted infrared radiation or backscattered radar intensity. This value is normally the average value for the whole ground area covered by the pixel. The intensity of a pixel is recorded as a digital number and stored with a finite number of bits (binary digits).
most popular sensors used in passive remote sensing are the, image plane scanning sensors, camera such as TV cameras and multispectral scanners covring both track scanning systems and track scanning sensors, such as multispectral scanners such as optical-mechanical scanner and scanning microwave radiometers. An active scanning and imaging sensor can be a LIDAR or RADAR.
Many remote sensing satellites are currently their providing imagery suitable for different applications. Each sensor is defining by its wavelength bands
Sensors Characteristics: -
- Spectral resolution: refers the ability of a sensor to know about the fine wavelength intervals. The finer the spectral resolution, the narrower the wavelength range for a bandpanchromatic.the example of spectral resolution are as follows: - multi-spectral and hyper-spectral sensors.
- Radiometric resolution: define the sensor ability to discriminate very small differences in energy. The finer the radiometric resolution of sensor, the more sensitive is to finding small differences in energy.
- Spatial resolution: refers to the area of the earth that each pixel represents
- Temporal resolution: it is the repetitivity observation over an area and it is equal to the time interval between successive observations taken.
In terms of the spatial resolution, the satellite imaging systems can be classified into:
- Low resolution systems - 1 km or more
- Medium resolution systems-. 100 m to 1 km
- High resolution systems - 5 m to 100 m
- Very high resolution systems- 5 m or less
Visual Image Interpretation: -
The visual interpretation of satelllite images is a complex process. visual interpretation is the meaning of the image content by considering the spatial and landscape pattern
Element of Remote sensing for visual interpretation and GIS
The various visual elements are as follows:
1) Tone
2) Shape
3) Size
4) Pattern
5) Texture
6) Shadow
7) Association
1) Tone- Tone is the brightness or colour of object in an image. It is the fundamental element to find out different target. Human eye can differentiate 20 to 30 shades of Grey tones and more than million colours.
- Tone can easily distinguishable variation from white to black.
- Images from satellite are transmitted in digital form to station and each image pixel is expressed in 256 grey-level
2) Texture-It represents arrangement of and frequency of total variation in a certain area of image.
- Coarse texture abrupt tonal variation.
- Smooth texture very little tonal variation.
- It is also important for distinguishing features in radar imagery.
- Smooth texture example such as fields, grassland.
- Rough surface example such as forest.
3) Shapes-It represent outline of an object.
- Many components in image or environment can be identified with their shape or forms.
- Shape is the very distinctive clue for interpretation.
- Example- a) Forest edges- irregular shape
b) Straight edges- agricultural field.
c) Circular shape- rotating sprinkles in land.
4) Size-It is the function of scale.
- Example- a) small building represent residential use.
b) last building represents warehouse and factory.
- It is an important element to detect the size of target relative to other object in image and also for interpretation of image of target.
5)Shadow - Shadow element helps in or give an idea of relative height of target.
- To distinguish show and cloud unfortunately deep shadow observe significant features.
- Shadow also help in identifying topography and landforms.
6)Pattern-It represents spatial arrangement of visibly discernible objects.
- A repetition of similar tones and texture will produce a distinctive and recognisable pattern.
- Urban Street with regular spaced house is an example of pattern.
7)Association / site-
- It is the feature in proximity to the target of interest.
- It takes into account the relationship between recognisable objects
- Examples such as residential areas would be associated with school, playground, etc. Similarly, lake is associated with boats, Marina etc.
GPS (Global Positioning System)
GPS is a navigation system using satellites, a receiver and algorithms to synchronize location, velocity and time data for air, sea and land travel.
GPS Satellite Constellation
The satellite constellation consists of 24-satellite constellation. The satellites are placed in six Earth centered orbital planes with four satellites in each plane. The nominal orbital period of a GPS satellite is one-half of a side realday. The orbits are circular and equally spaced about the equator at a 60°separation with an inclination relative to the equator of nominally 55°. The orbital radius (i.e., nominal distance from the center of mass of the Earth to the satellite) is approximately 26,600km. This satellite constellation gives a 24-hr global user navigation and time determination capability. Similarly, for the Earth’s equator, it is like a ring that has been opened and laid on a flat surface. The slope of every orbit represents its inclination with respect to the Earth’s equatorial plane, which is nominally 55°. The orbital plane locations with respect to the Earth are defined by the longitude of the ascending node whereas the location of the satellite within the orbital plane is defined by the mean anomaly. The longitude of the ascending node is point of intersection of each orbital plane with the equatorial plane. The Greenwich meridian is the reference point where the longitude of the ascending node has value of zero. Several different notations are used to refer to the satellites in their orbits.
GPS Accessories:
- GPS Cables & Antennas,
- GPS Cases,
- GPS Chargers & Adapters,
- GPS Maps,
- GPS Mounts
Segments
GPS is made up of three different components, called as segments:
The three segments of GPS are:
- Space (Satellites) —satellites circling the Earth, transmitting signals to users on geographical position and time of day.
- Ground control —Control Segment is made up of Earth-based monitor stations, master control stations and ground antenna.It include tracking and operating the satellites in space and monitoring transmissions.
- User equipment — GPS receivers and transmitters including items like watches, smartphones etc
Operational Control Segment (OCS)
The OCS maintains the satellites and their proper functioning. This includes maintaining the satellites in its proper orbital positions called station keeping and monitoring satellite subsystem health and status. The OCS also monitors the satellite solar arrays, battery power levels, and propellant levels used for maneuvers and activates spare satellites if available.
The OCS updates each satellite’s clock, ephemeris, and almanac and other indicators in the navigation message once per day or as required. The ephemeris parameters are an accurate fit to the GPS satellite orbits and are valid only for a time interval from four to six hours depending on the time from the last control segment upload based on the once per day. Depending on the satellite version, the navigation message data can be stored or a minimum 14 days to a maximum of 210 days’ duration in intervals of four to six hours. The almanac consists of 7 of the 15 ephemeris orbital parameters.
Almanac data is required to predict the approximate satellite position and aid in satellite signal acquisition. The OCS resolves satellite anomalies, controls SA and AS and makes pseudorange and delta range measurements at the remote monitor stations to determine satellite clock corrections, almanac, and ephemeris. To accquire the above functions, the control segment is comprised of three different physical components: the master control station (MCS), monitor stations, and the ground antennas.
OCS Operations
The MCS is the center of the control segment operations and is found at Falcon Air Force Base, Colorado Springs, CO. The monitor stations inactively track the GPS satellites as they pass overhead by making pseudorange and delta range measurements. These measurements are made using both the L1 and L2 GPS satellite downlink frequencies. This raw data and the received navigation message with local weather is transmitted to the MCS through the Defense Satellite Communications System and other ground communications systems.
The MCS processes data from the monitor stations for satellite navigation payload control. Data from all the monitor stations is used to form satellite clock corrections, ephemeris and almanac data for every satellite. The MCS also monitors the status of satellites and ground stations. Satellite processor diagnostics can be requested and the satellite clock can be updated. A backup master control station is located at Gaithersburg, MD. This backup MCS is a temporary contractor facility.
GPS was originally designed so that real-time autonomous positioning and navigation with the civilian C/A code receivers would be less accurate than military P-code receivers. but the obtained accuracy was almost the same from both receivers. To ensure national security, the U.S. DoD implemented the so-called selective availability (SA) on Block II GPS satellites to deny precise real-time autonomous positioning to unauthorized users. SA was officially activated on March 25, 1990.
SA has two types of errors, the first one, called delta error, results from dithering the satellite clock, and is same to all users worldwide. The second one, called epsilon error, is an additional slowly varying orbital error. With SA turned on, nominal horizontal and vertical errors can be up to 100m and 156m, respectively, at the 95% probability level.
Satellite and receiver clock errors
Each GPS Block II and Block IIA satellite contains four atomic clocks, two cesium and two rubidium. The newer generation Block IIR satellites carry rubidium clocks only. One of the onboard clocks, a cesium for Block II and IIA, is selected to provide the frequency and the timing requirements for generating the GPS signals.
The GPS satellite clocks, although highly precise, are not perfect. Their stability is about 1 to 2 parts in 1013 over a period of one day. This means that the satellite clock error is 8.64 to 17.28 ns per day. The corresponding range error is 2.59m to 5.18m, which can be calculated by multiplying the clock error by the speed of light (i.e., 299,729,458 m/s). Cesium clocks tend to behave better over a longer period of time as compared to rubidium clocks. In fact, the stability of the cesium clocks over a period of 10 days or more improves to several parts in 1014.
Satellite cloc errors introduces additional errors to the GPS measurements. These errors are common to all users observing the same satellite and can be eliminated through differencing between the receivers. Applying the satellite clock correction in the navigation message can also rectify the satellite clock errors which leaves an error of the order of several nanoseconds and translates to a range error of a few meters.
GPS receivers uses inexpensive crystal clocks, which are much less precise than the satellite clocks. The receiver clock error is much larger than that of the GPS satellite clock. It can be removed through differencing between the satellites or it can be treated as an additional unknown parameter in the estimation process. Precise external clocks are used in some applications in place of the internal receiver clock. The external atomic clocks have superior performance compared with the internal receiver clocks, they cost between a few thousand dollars for the rubidium clocks to about $20,000 for the cesium clocks.
GPS Measurement Techniques: -
- There are many different types of GPS measurements used in time and frequency metrology.
- These measurements can be divided into three generalcategories: one-way, common-view, and carrier-phase.
- Normally GPS measurements made in calibration and testing laboratories are one-way measurements.
|

- In GPS measurement techniques -One-way measurements are easy to make and their uncertainties are small enough to meet the requirements calibration and testing laboratory.
Common-view and carrier-phase measurements require more effort in processing of the measurement data. For this reason, they are usually used for small as possible.
1-Way GPS Measurements: -
- one-way GPS technique measurement use the signals obtained from receiver of GPS as the reference for calibration.
- GPS signals are used in real time, and no post processing of the measurement results is required.
- The purpose of the measurement is usually either to synchronize a non-time pulse, or to calibrate frequency source.
- Before receiver is used for measurements, it must complete its signal process.
- Part of the acquisition process involves surveying the antenna position.
- time and frequency receivers generally collect single position fix, and use that same position.
- Many receivers automatically start survey when they are turned on. When the process is completed, a front panel indicator shows the operator that the receiver is ready for use. Once the signal acquisition is completed, an output signal from the receiver is connected to measurement system.
- For time synchronization measurements, 1 pps signal from the receiver is used as input to time interval counter.
For frequency measurements, frequency output from GPSDO is used as input to a phase comparator, or used as the external time base for counting of freq
Errors and Biases
Multipath is an error source for both the carrier-phase and pseu-dorange measurements. Multipath error occurs if the GPS signal arrives at the receiver antenna through different paths. These paths can be the direct line of sight signal and reflected signals from objects surrounding the receiver antenna.
Multipath distorts the original signal by interference with the reflected signals at the GPS antenna. It affects both the carrier phase and pseudorange measurements whereas its size is much larger in the pseu-dorange measurements. The size of the carrier phase multipath can reach a top value of a quarter of a cycle (about 4.8 cm for the L1 carrier phase). The pseudorange multipath can theoretically reach several tens of meters for the C/A-code measurements. However, with new advances in receiver technology, actual pseudorange multipath is decreased dramatically.
Satellite positions as a function of time, which where included in the broadcast satellite navigation message and are predicted from previous GPS observations at the ground control stations. Overlapping 4-hour GPS data spans are used by the operational control system to predict fresh satellite orbital elements for each 1-hour period. Modeling the forces acting on the GPS satellites will not be perfect, which causes some errors in the estimated satellite positions, known as ephemeris errors. An ephemeris error is usually in the order of 2m to 5m, and can reach up to 50m under selective availability. The range error due to the combined effect of the ephemeris and the satellite clock errors is of the order of 2.
Ephemeris error for a particular satellite is identical to all GPS users worldwide. However, as different users see the same satellite at different view angles, the effect of the ephemeris error on the range measurement, and consequently on the calculated position, is different. This means that combining the measurements of two receivers and tracking a particular satellite cannot totally remove the ephemeris error. For relative positioning, the following rule of thumb gives a rough estimate of the effect of the ephemeris error on the baseline solution: the baseline error / the baseline length = the satellite position error / the range satellite. This means that if the satellite position error is 5m and the baseline length is 10 km, then the expected baseline line error due to ephemeris error is approximately 2.5 mm.
Applications, such as studies of the crustal dynamics of the earth, require more accurate ephemeris data than the broadcast ephemeris
Surveying with GPS: -
- Now a days GPS is part of everyday life.
- The following things were the GPS is used are as follows
- mobile phones,
- navigation in car
- rescue and search equipment.
- GPS was rapidly using for surveying, as it can give direct position of Latitude, Longitude and Height, without measureing angles and distances between 2 points or intermediate points.
- clear view of the sky is required so the signal from the GPS satellites could received clearly.
- Trilateration and EDM are similar as of GPS except that the known positions are now the GPS satellites.
- equipment and calculations are extremely difficult and complex, but for the user it is very simple.
- GPS receiver almost instantly works out its position with refrence of Latitude, Longitude and Height, from the data broadcast by the satellites which are is space. These data include a description of the satellites changing position or its orbit and the time at which data was transmitted.
Coordinate Transformation
Coordinate transformation is a normal operation in the development of spatial data for GIS. A coordinate transformation brings spatial data into an Earth based map coordinate system so that each data layer merges with every other data layer. This alignment promises features fall in their proper relative position when digital data from different layers are merged. Within the limits of data accuracy, a good transformation helps avoid inconsistent spatial relationships like farm fields on freeways, roads under water, or cities in the middle of swamps, except where these truly are. Coordinate transformation is also called as registration, because it “registers” the layers to a map coordinate system. Coordinate transformation is most commonly applied to convert newly digitized data from the digitizer/scanner coordinate system to a standard map coordinate system.
The input coordinate system depends on the digitizer or scanner-assigned values. An image may be scanned and coordinates recorded as a cursor is moved across the image surface. These coordinates are usually recorded in pixel, inch, or cm units respecs to an origin located near the lower left corner of the image.
The absolute values of the coordinates depend on where the image happened to be placed on the table prior to scanning, but the relative position of digitized points does not vary.
Accuracy considerations
Some factors that can hinder GPS accuracy include: -
- Atmospheric effects: heavy storm cover and solar storms can all affect GPS devices.
- Numerical miscalculations: This might be a factor when the device hardware is not designed to specifications.
- Artificial interference: These include GPS spoofs
- Physical obstructions: Arrival time measurements can be skewed by large masses like mountains, buildings, trees and more.
- The feature set of a GNSS device
- The position of the satellites at the time the recording was made
- The characteristics of the surrounding landscape
GPS satellites broadcast their signals in space with a certain precision, but what we receive depends on additional factors, including satellite geometry, signal blockage, atmospheric conditions, and receiver design features/quality.
For example, GPS-enabled smart phones are typically accurate to within a 4.9 m (16 ft.) radius under open sky but their accuracy weakens near buildings, bridges, and trees.
High-end users boost GPS accuracy with dual-frequency receiver’s systems which can enable real-time positioning within a few cm, and long-term measurements at the mm level.
It is a collection of computer software and information which is used for viewing, analysing, managing and displaying geographical data.
In general, GIS allows users to search for information about specific geographical areas, analyse spatial information, edit the data and create maps, charts and reports that show users the results in visual forms.
GIS helps users to find answers to their questions and solve the problems by presenting data in simple visual ways.
The three types of GIS Data are
-spatial,
–attribute, &
—metadata
- Spatial data
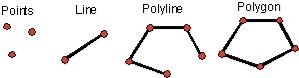
- vector data
- Point Data — layers containing by points (or “events”) described by x,y (lat,long; easting, northing)
- Line/Polyline Data — layers that are described by x,y points (nodes, events) and lines (arcs) between points (line segments and polylines)
- Polygon Data — layers of closed line segments enclosing areas that are described by attributes
- vector data
iv. |
iv.Polygon data can be “multipart” like the islands of the state of Hawaii.
B. raster or grid data (matrices of numbers describing e.g., elevation, population, herbicide use, etc.
C. images or pictures such as remote sensing data or scans of maps or other photos. This is special “grid” where the number in each cell describes what color to paint or the spectral character of the image in that cell. (to be used, the “picture” must be placed on a coordinate system, or “rectified” or “georeferenced”)
D. TINs – Triangular Irregular Networks – used to discretize continuous data
E. Terrain datasets built from lidar and other point clouds. Demo in ArcGIS
2. Attribute data are non-spatial characteristics that are connected by tables to points, lines, “events” on lines, and polygons (and in some cases GRID cells)
- A point, vector or raster geologic map might describe a “rock unit” on a map with a single number, letter or name, but the associated attribute table might have
- age
- lithology
- percent quartz
- etc, for each rock type on the map.
- most GIS programs can either plot the polygon by the identifier or by one of the attributes
3. Metadata
- metadata are the most forgotten data type
- absolutely necessary if you’re going to use data, or if someone is going to use your data later (or your derivative information)
- contains information about
- scale
- accuracy
- projection/datum
- data source
- manipulations
- how to acquire data
What are the Advantages of GIS?
The advantages of using a geographic information system include:
- Improved decision making – decisions are made easier because specific and detailed information is presented about one or more locations.
- Reduce costs and increase efficiency – especially regarding maintenance schedules, fleet movements or scheduling timetables.
- Improved communication between any involved organisations or departments as the visual format is easily understood by all.
- Easy recordkeeping – geographical changes are easily recorded by GIS for those responsible of recording the changes.
- Managing geographically – knowing what is and will be occurring in a geographic space in order to plan a course of action.
Using GIS allows people to see the world in a different way by mapping the position and quantity of things, mapping the density of people and objects and mapping any changes that occur. GIS also allows us to find out what is happening inside a specific area or nearby to a specific area.
More specifically, GIS is used through:
- Environmental Geography – to analyse the impact people have on the environment.
- Physical Geography – to study the elements of atmosphere, biosphere and geosphere.
- Emergency Management Information System – to give real time data to emergency responders about the geographical layout.
- Health Geography – to use geographical information to study health related issues such as disease and illness.
- Economic Geography – to study economic activities across the earth.
- Transportation Geography – to investigate the spatial interactions of people or things.
There are five basic GIS components that make it effective.
- Hardware:
Hardware consists of the technical equipment needed to run a GIS efficiently. It includes computer/s (standalone / networked) with good configuration – good processing capability to run the GIS software, enough hard disk space to store large spatial data, and input and output devices such as scanners, printers, etc.
- Software:
GIS software helps to store, analyze, and display geographic information in the form of maps and reports. It provides a Graphical User Interface (GUI) for easy display and access to tools for input, visualizing, processing, editing, analyzing and querying geographic data. Data is accessed and managed through Data Base Management System (DBMS).
- Data:
The most important GIS component is the data – how it is managed and accessed. Data is stored as geographic data (spatial data) and related tabular data (non-spatial data). Data comes in various formats, and GIS integrates such spatial data and non-spatial data by using DBMS. It is the key functionality of GIS that helps in organizing, managing and accessing data.
- Methods:
To make a GIS system work properly requires not only the necessary investments in hardware, software and data, but also requires knowledge to utilize the GIS technology. The methods are the procedure followed to answer the question need to be resolved. Method in GIS includes how the data will be accessed, stored, managed, processed, analyzed, and finally presented as output for particular application.
- People:
People in GIS are technical persons (GIS managers, database administrators, specialists, analysts, and programmers) who design and maintain the GIS work and those who use it. They are the ones who make GIS work.
People in GIS can be categorized into: viewers – the people who just use GIS for reference; general users – who use GIS for business, services, and making decisions such as planners, scientists, engineers, etc; GIS specialists: who are the backbone of GIS and maintain, process and analyze geographic data. They provide technical support to the users.
Reference :
1. Principles of Surveying. Vol. I by J. G. Olliver, J. Clendinning - Van Nostrand
Reinhold.
2. Plane Surveying by A. M. Chandra, New Age International Publishers.
3. Surveying Vol. I & II by Dr. K. R. Arora, Standard Book House.
4. Elements of Photogrammetry - Paul R. Wolf, McGraw Hill Publication.
5. Remote sensing and Geographical Information System- A. M. Chandra and S. K.
Ghosh, Narosa Publishing House.
6. Advanced Surveying -Total Station, GIS and Remote Sensing – Satheesh Gopi, R.Sathikumar and N. Madhu, Pearson publication.
7. The GIS Book, 5Th Edition, George B. Korte, PE onwards press.




