UNIT - 1
DFT and FFT
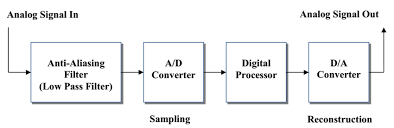
Fig.1: Block diagram of DSP system
To perform the processing digitally, there is a need for an interface between the analog signal and the digital processor. This interface is called an analog-to-digital (A/D) converter. The output of the A to D converter is a digital signal that is appropriate as an input to the digital processor.
The digital signal processor may be a large programmable digital computer or a small microprocessor programmed to perform the desired operations on the input signal. It may also be a hardwired digital processor configured to perform a specified set of operations on the input signal.
Programmable machines provide the flexibility to change the signal processing operations through a change in the software, whereas hardwired machines are difficult to reconfigure. Consequently, programmable signal processors are in very common use.
On the other hand, when signal processing operations are well defined, a hardwired implementation of the operations can be optimized, resulting in a cheaper signal processor and, usually, one that runs faster than its programmable counterpart.
In applications where the digital output from the digital signal processor is to be given to the user in analog form, such as in speech communications, we must provide another interface from the digital domain to analog domain. Such an interface is called a digital-to-analog (D/A) converter. Thus the signal is provided to the user in analog form.
However, there are other practical applications involving signal analysis, where the desired information is conveyed in digital form and no D/A converter is required. For example, in the digital processing of radar signals, the information extracted from the radar signal, such as the position of the aircraft and its speed, may simply be printed on paper. There is no need for a D/A converter in this case.
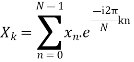
The discrete Fourier transform transforms a sequence of N complex numbers  into another sequence of complex numbers
into another sequence of complex numbers
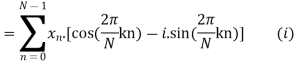
 which is defined by
which is defined by
Example:
Let N =4 and
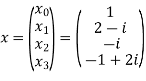
Here we demonstrate how to calculate the DFT of x using equation (1)




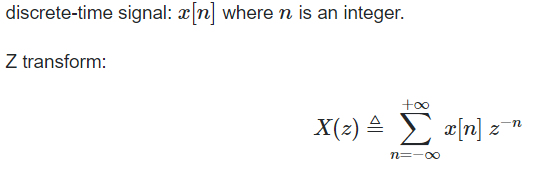
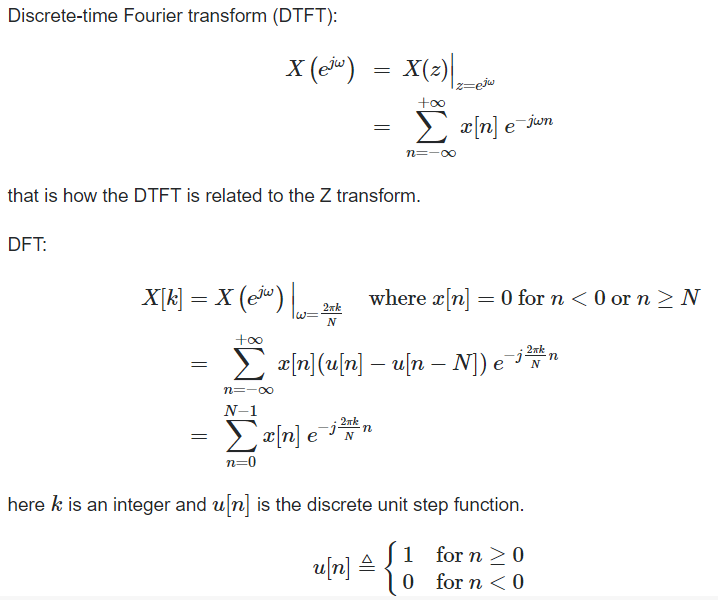
Relation between DFT and Z Transform
Linear Property
If x(t) -> X(w)
Y(t) -> Y(w) then
a x(t) + b y(t) -> a X(w) +b Y(w)
Time Shifting Property
If x(t)⟷F.TX(ω)
Then Time shifting property states that
x(t−t0)⟷F.T e−jω0t X(ω)
Frequency Shifting Property
If x(t)⟷X(ω)
Then frequency shifting property states that
ejω0t.x(t)⟷X(ω−ω0)
Time Reversal Property
If x(t)⟷X(ω)
Then Time reversal property states that
x(−t)⟷X(−ω)
Differentiation Property
If x(t)⟷X(ω)
Then Differentiation property states that
dx(t)dt ⟷jω.X(ω)
dnx(t)dtn⟷(jω)n.X(ω)
Integration Property
Integration property states that
∫x(t)dt⟷1jω X(ω)
Then
∭...∫x(t)dt⟷(jω)n X(ω)
Multiplication and Convolution Properties
If x(t)⟷X(ω)
y(t)⟷Y(ω)
Then multiplication property states that
x(t).y(t)⟷X(ω)∗Y(ω)
and convolution property states that
x(t)∗y(t)⟷1/2πX(ω).Y(ω)
Numerical:


2. Compute the N-point DFT of x(n)=7(n−n0)
Solution − We know that,
Substituting the value of x(n),
Let us take two finite duration sequences  ,having integer length as N. Their DI are
,having integer length as N. Their DI are  reapectively which is shown below
reapectively which is shown below
Now we will try to find the DFT of another sequence  , which is given by
, which is given by 

By taking the IDFT of the above we get
After solving the above equation finally we get

Methods of Circular Convolution
Generally, there are two methods, which are adopted to perform circular convolution and they are −
Concentric Circle Method
Let x1(n) and x2(n) be two given sequences. The steps followed for circular convolution of x1(n) and x2(n) are
Matrix Multiplication Method
Matrix method represents the two-given sequence x1(n) and x2(n) in matrix form.
Numerical:
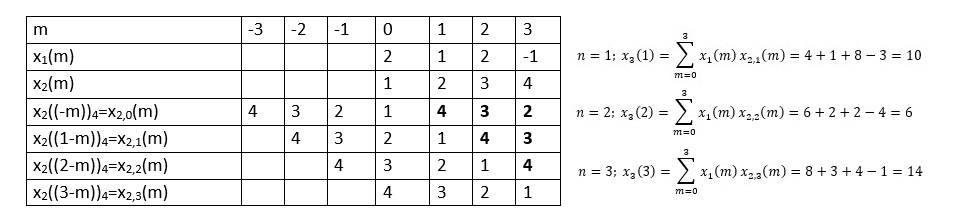
Perform circular convolution of the two sequences, x1(n)= {2,1,2,-1} and x2(n)= {1,2,3,4}

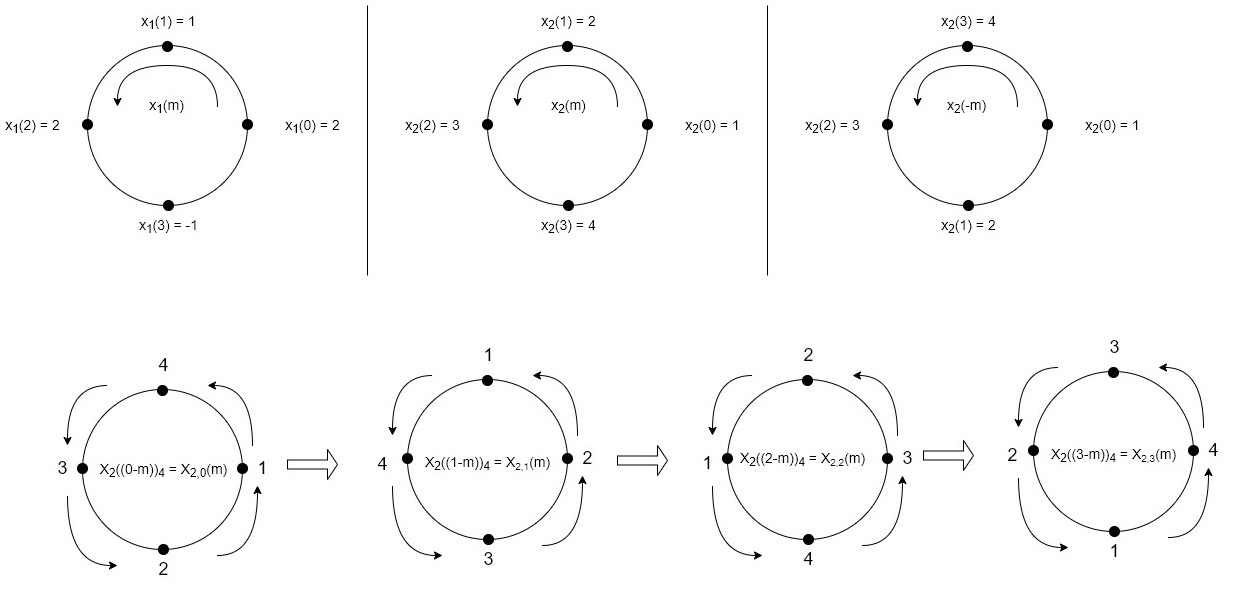
(2)

When n=0; 

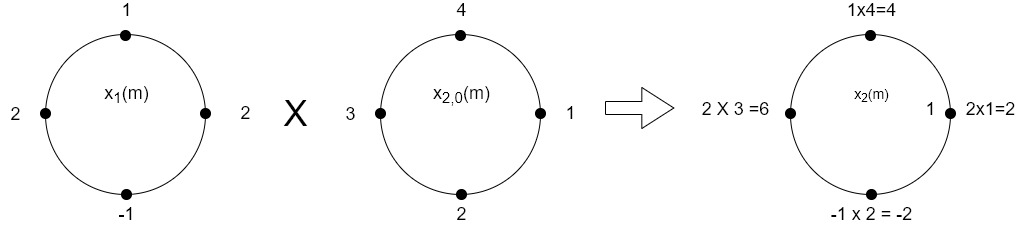
The sum of samples of v0(m) gives x3(0)
⸫ x3(0)=2+4+6-2=10
When n=1; 

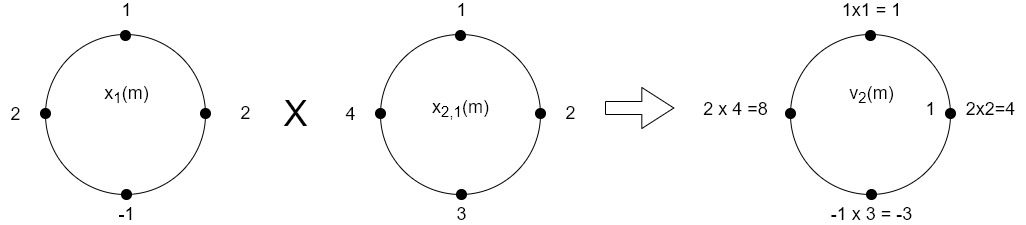
The sum of samples of v1(m) gives x2(1)
⸫ x3(1)=4 + 1 +8-3=10
(3)When n=2; 

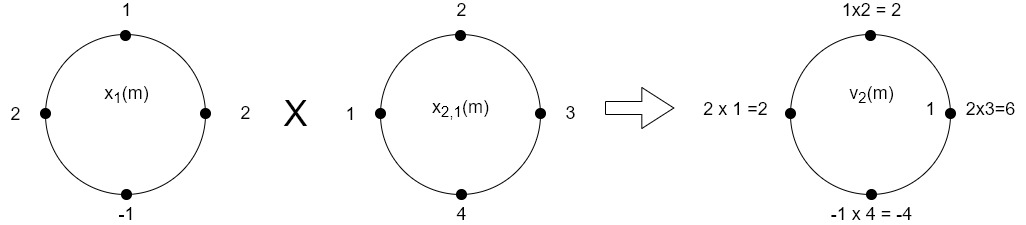
The sum of samples of v2(m) gives x3(2)
⸫ x3(2)=6+2+2-4=6
(4) When n=3; 

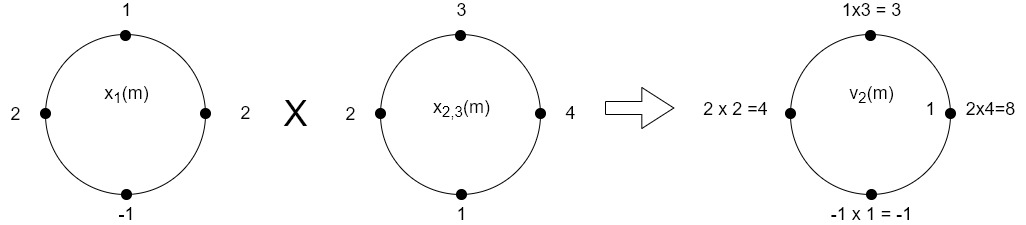
The sum of samples of v3(m) gives x3(3)
⸫ x3(3)=8+ 3+ 4-1= 14
x3(n)={10,10,6,14}

= x1(0) x x2,0(0) + x1(1) x2,0(1) + x1(2) x2,0(2) + x1(3) x2,0(3)
= 2 x 1 + 1 x 4 + 2 x 3 + (-1) x 2 = 2 +4 +6 -2 =10
The inverse DFT (IDFT) transforms N discrete-frequency samples to the same number of discrete-time samples. The IDFT has a form very similar to the DFT and can thus also be computed efficiently using FFTs.
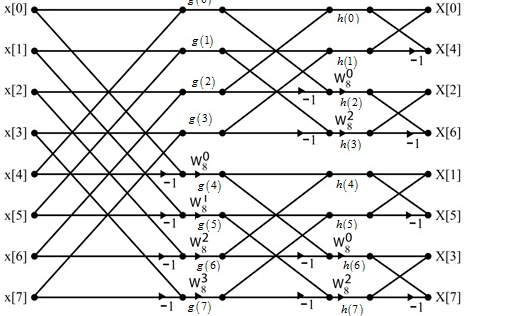
Decimation-in-time algorithm
This algorithm is known as Radix-2 DIT-FFT algorithm which means the number of output points N can be expressed as a power of 2 that is N = 2M where M is an integer.
Let x(n) be a sequence where N is assumed to be a power of 2. Decimate or break this sequence into two sequences of length N/2 where one sequence consists of even-indexed values of x(n) and the other of odd-indexed values of x(n).
xe(n) = x(2n) n= 0,1,……….. N/2-1
xo(n) = x(2n+1) n= 0,1,……….. N/2 -1
The N-pt DFT of x(n) can be written as
X(k) =  WN nk where k=0,1……….. N-1.
WN nk where k=0,1……….. N-1.
Separating x(n) into even and odd indexed values of x(n) we obtain
X(k) =  WN nk +
WN nk +  WN nk
WN nk
( n even) (n odd)
=  WN 2nk +
WN 2nk +  WN (2n+1)k
WN (2n+1)k
=  WN 2nk + Wnk
WN 2nk + Wnk  W N 2nk
W N 2nk
X(k) =  WN 2nk + Wnk
WN 2nk + Wnk  W N 2nk
W N 2nk
WN2 =( e-j2π/N) 2 = e-j2π/N/2 = W N/2 .
WN2 = W N/2
X(k) =  W N/2n k + WNk
W N/2n k + WNk  WN/2kn
WN/2kn
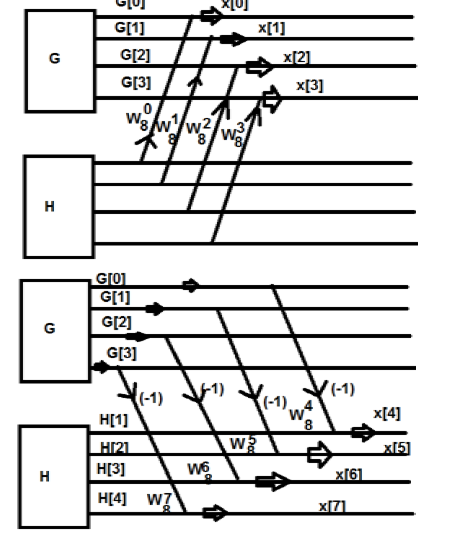
W84 = -1
W8 5 = - W 81
W86 = - W82
W87 = - W83
G(0) – H(0) = x(4)
G(1) - W 81 H(1) = x(5)
G(2) - W82 H(2) = x(6)
G(3) - W83 H(3) = x(7)
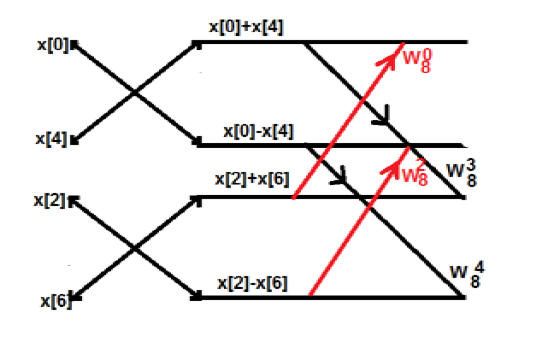
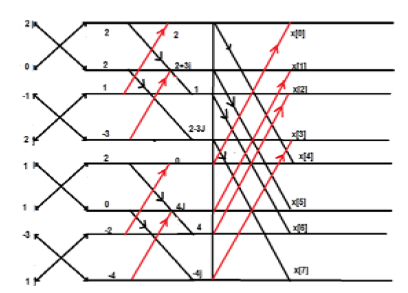
Consider the sequence x[n]={ 2,1,-1,-3,0,1,2,1}. Calculate the FFT.
Arrange the sequence as x(0) x(4) x(2) x(6) x(1) x(5) x(3) x(7)
Since N=8 find the values W8 0 to W 87
Apply the butterfly diagram to obtain the values.
DIF-FFT ALGORITHM
Decimation in Frequency FFT
Apart from time sequence, an N-point sequence can also be represented in frequency. Let us take a four-point sequence to understand it better.
Let the sequence be x[0],x[1],x[2],x[3]………..x[7]
Mathematically, this sequence can be written as;
X(k) =  WN n-k where k=0,1……….. N-1.
WN n-k where k=0,1……….. N-1.
Now let us make one group of sequence number 0 to 3 and another group of sequence 4 to 7. Now, mathematically this can be shown as
=  WN nk +
WN nk +  WN nk
WN nk
Let us replace n by r, where r = 0, 1 , 2….N/2−1.
=  W N/2 nr
W N/2 nr
We take the first four points x[0],x[1],x[2],x[3] initially, and try to represent them mathematically as follows –
 W 8 nk +
W 8 nk +  W8 (n+4) k
W8 (n+4) k
=  +
+  W8 (n+4) k
W8 (n+4) k
=  + {
+ {  W8 (4) k } W8 nk
W8 (4) k } W8 nk
X[0] =  + X[n+4]
+ X[n+4]
X[1] =  + X[n+4]) W8 nk
+ X[n+4]) W8 nk
= X(0) – X(4) + (x[1] – X[5]) W8 1 + ( X[2] – X[6] )W82 + X(3) – X(7) W8 3
Find the DIF –FFT of the sequence x(n)= { 1,-1,-1,1,1,1,-1} using Dif-FFT algorithm.
X(0)= 20 X(4) =0
X(1) = -5.828- j2.414 X(5) = -0.1716 + j 0.4141
X(2) = 0 X(6) = 0
X(3) = -0.171 – j 0.4142 X(7) = -5.8284 + j2.4142
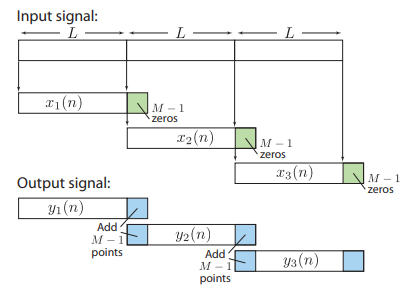
Overlap add method

- Zero pad to be length of N-L+M-1.

- Take N-DFT of to give
 , k=0,1,…,N-1.
, k=0,1,…,N-1.
- Multiply =
 . H(k), k=0,1,…,N-1.
. H(k), k=0,1,…,N-1.
- Take N-DFT of to give
 , n=0,1,…,N-1.
, n=0,1,…,N-1.


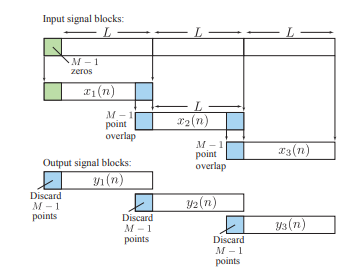
Overlap save method

- Take N-DFT of to give
 , k= 0,1,…,N-1.
, k= 0,1,…,N-1.
- Multiply =
 . H (k), k=0,1,…,N-1.
. H (k), k=0,1,…,N-1.
- Take N-DFT of to give
 , n=0,1,…,N-1.
, n=0,1,…,N-1.
- Discard the first M-1 points of each output block .


Let X be a linear random variable, and Θ be a circular random variable. We observe data (x1,θ1),…,(xn,θn) on (X,Θ). In our case, n denotes cells, xi denotes log2 expression (CPM) of a selected gene, and θi denotes the angle of cell i on the unit circle formed by GFP and RFP.
Θ measures directions in 2-dimensions and can be represented as unit vectors u in the plane, i.e., as points on the sphere Sp−1={u:uT u=1}, the (p-1) dimensional sphere with unit radius and centre at the origin, where p=2. u is thus defined by
u= (cosΘ, sinΘ)T
This definition of Θ is also known as the embedding approach, where the sphere Sp−1 is regarded as a subset of Rp.
IFFT is a fast algorithm to perform inverse (or backward) Fourier transform (IDFT), which undoes the process of DFT. IDFT of a sequence { } that can be defined as:
} that can be defined as:
The circular cross-correlation of two sequences in the time domain is equivalent to the multiplication of DFT of one sequence with the complex conjugate DFT of the other sequence.
Mathematical representation:
For x(n) and y(n), circular correlation rxy(l) is
rxy(l)  Rxy(k) = X(k).Y*(k)
Rxy(k) = X(k).Y*(k)
Derivation:

References:
1. John G Prokis , “Digital Signal Processing ,Principles, Algorithms and
Application”,PHI
2. S.K.Mitra, “Digital Signal Processing”, TMH
3. E. C. Ifleachor and B. W. Jervis, “Digital Signal Processing- A Practical
Approach”, Second Edition, Pearson education.
4.Avtar Singh, S. Srinivasan, “Digital Signal Processing Implementation using DSP,
Microprocessors with examples from TMS 320C6XXX”, Thomas Publication.




