Unit - 4
Systems of linear differential equations
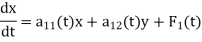
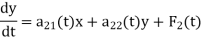
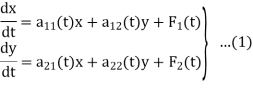
The general linear system of two first order differential equations in two unknown functions x and y is of the form


For example: 
Note- When a set of linear equations which is related to a group of functions to their derivative, then the system is called the system of linear differential equations.
The general linear system of three first-order differential equations in three unknown functions x, y and z can be defined as



Example: 
The normal form in the case of two linear differential equations in two unknown functions are given as-
For example:
The normal form in the case of linear system of three differential equations in three unknown functions x,y and z are



For example:
Normal form of LDE-
The normal form of in the case of two LDE in two unknown functions is-
The normal form of in the case of a linear system of three differential equations in three unknown functions x, y and z is-



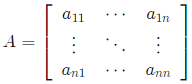
Matrix form of system of linear differential equations
Suppose the system of linear differential equations is gives as below






This system is written as

Where

And
Key takeaways
- When a set of linear equations which is related to a group of functions to their derivative, then the system is called the system of linear differential equations.
- The normal form in the case of two linear differential equations in two unknown functions are given as-
In order to solve a linear system with constant coefficient, we use symbolic operators.
Suppose x is n-times differentiable function of the independent variable t. We denote the operation of differentiation with respect to t by the symbol ‘D’ and we call it as differential operator.
In terms of this differential operator the derivative dx/dt is denoted by Dx.
Which is

In same order we denote the second derivative of x with respect to t by 
The nth derivative of x with respect to t by 
That is

Extending the operator notations, we write
And

Where a, b and c are the constants.
In this notation the linear differential expression with constant coefficients 

Can be written as-

Here note that the operator  in this expression do not represent quantities that are to be multiplied by the function x, but rather they indicate operations that are to be carried out upon this function.
in this expression do not represent quantities that are to be multiplied by the function x, but rather they indicate operations that are to be carried out upon this function.
The expression

Where  are constants, is called linear differential operator with constant coefficients.
are constants, is called linear differential operator with constant coefficients.

Where  are constants, now suppose
are constants, now suppose  are both n-times differentiable functions of t and
are both n-times differentiable functions of t and  are constants.
are constants.
Then it can be written as

For example, if the operator  is applied to
is applied to  then
then

Or

An operator method for linear system with constant coefficient
We consider a linear system of the form


Where  are linear differential operators with constant coefficient.
are linear differential operators with constant coefficient.




Where a, b,  are constants.
are constants.
Example:
A simple example of a system which may be expressed in the form of (1) and (2) is provided by
Let’s denote the above system in notation format


Where




Now we apply the operator  to (1) and
to (1) and  to (2), we get
to (2), we get


Now subtract the second of these equations from first, since 
We get

Or

 is the left side of this equation is itself a linear differential operator with constant coefficients.
is the left side of this equation is itself a linear differential operator with constant coefficients.
We assume that it is neither a zero nor a non-zero constant and denote it by  .
.
And if we again assume that  is the right side and
is the right side and  are the members of this, then this member is some function let say
are the members of this, then this member is some function let say  .
.
Then the equation (3) becomes

Equation (4) is a linear differential equation with constant coefficient in the single dependent variable x.
Hence we notice that the procedure has eliminated the other dependent variable y.
We now solve the differential equation (4) for x.
Suppose (4) is of order n. Then the general solution of (4) will be

Where  are the n linearly dependent solutions of the homogenous linear equation
are the n linearly dependent solutions of the homogenous linear equation  and
and  are arbitrary constants and
are arbitrary constants and  is the particular solution (PI).
is the particular solution (PI).
Now again we apply the operators  and
and  to the equations (1) and (2) respectively.
to the equations (1) and (2) respectively.
The system becomes

Subtracting, we get

As same as above

The general solution

Where  are the n linearly dependent solutions of the homogenous linear equation
are the n linearly dependent solutions of the homogenous linear equation  and
and  are arbitrary constants and
are arbitrary constants and  is the particular solution (PI).
is the particular solution (PI).
Key takeaways
- In terms of this differential operator the derivative dx/dt is denoted by Dx.
Which is

2. 
Can be written as-

Let us consider a basic type of system of two linear differential equations in two unknown functions. This is of the form
We will assume that the functions  are all continuous on a real interval
are all continuous on a real interval 
If  and
and  are zero for all t, then the above system is called homogeneous, otherwise the system is called non-homogeneous.
are zero for all t, then the above system is called homogeneous, otherwise the system is called non-homogeneous.
For example:


Is homogenous,
And the system
Is non-homogeneous.
We mean by the solution of equation (1), an ordered pair of real functions each having a continuous derivative on the real interval  such that
such that


For all t such that  ,
,
In other words,


Simultaneously satisfy both equation of the system (1) identically for 
Key takeaways
If  and
and  are zero for all t, then the above system is called homogeneous, otherwise the system is called non-homogeneous.
are zero for all t, then the above system is called homogeneous, otherwise the system is called non-homogeneous.
Linear differential equation are those in which the independent variable and its derivative occur only in the first degree and are not multiplied together.
Thus the general linear differential equation of the n’th order is of the form

Where  and X are function of x.
and X are function of x.
Linear differential equation with constant co-efficient are of the form-

Where  are constants.
are constants.
Rules to find the complementary function-
To solve the equation-

This can be written as in symbolic form-

Or-
It is called the auxiliary equation.
Let  be the roots-
be the roots-
Case-1: If all the roots are real and distinct, then equation (2) becomes,

Now this equation will be satisfied by the solution of 
This is a Leibnitz’s linear and I.F. = 
Its solution is-

The complete solution will be-

Case-2: If two roots are equal 
Then complete solution is given by-

Case-3: If one pair of roots be imaginary, i.e.  then the complete solution is-
then the complete solution is-

Where  and
and 
Case-4: If two points of imaginary roots be equal-

Then the complete solution is-

Example-Solve 
Sol.
Its auxiliary equation is-


Where-

Therefore the complete solution is-

Inverse operator-
 is that function of x, not containing arbitrary constants which when operated upon gives X.
is that function of x, not containing arbitrary constants which when operated upon gives X.
So that  satisfies the equation f(D)y = X and is, therefore, its P.I.
satisfies the equation f(D)y = X and is, therefore, its P.I.
f(D) and 1/f(D) are inverse operator.
Note-
1. 
2. 
Rules for finding the particular integral-
Let us consider the equation-

Or in symbolic form-

So that-

Now-
Case-1: When X = 

In case f(a) = 0, then we see that the above rule will not work,
So that-

Example: Find the P.I. Of (D + 2)
Sol.
P.I. = 
Now we will evaluate each term separately-



And

Therefore-
Example: Solve (D – D’ – 2 ) (D – D’ – 3) z = 
Sol.
The C.F. Will be given by-

Particular integral-



Therefore the complete solution is-

Case-2: when X = sin(ax + b) or cos (ax + b)

In case  then the above rule fails.
then the above rule fails.
Now-

And if 

Similarly-



Example: Find the P.I. Of 
Sol.






Example: Find the P.I. Of (D + 1) (D + D’ – 1)z = sin (x + 2y)
Sol.




Example: Find P.I. Of
Sol. P.I = 
Replace D by D+1

Put 

Problem:
Solve 

Solution:
Auxiliary equation 


Complementary function 




Complete Solution is 

Problem:
Solve 
Solution:
Auxiliary equation 


C.F is 

 [
[ ]
]
 The Complete Solution is
The Complete Solution is 
Example:
Solve 
Solution:
The Auxiliary equation is 
 The C.F is
The C.F is 

P.I 


 The Complete Solution is
The Complete Solution is 
Example:
Solve 
Solution:
The Auxiliary equation is 

 The C.F is
The C.F is
P.I 
Now, 


 The Complete Solution is
The Complete Solution is

Example:
Solve 
Solution:
The auxiliary solution is 

 The C.F is
The C.F is
Now, 
 [Putting
[Putting  ]
]

Similarly, we find that

 The Complete Solution is
The Complete Solution is

Example:
Solve 
Solution:
The auxiliary equation is 
 The C.F is
The C.F is 

 [Put
[Put  ]
]

 The Complete Solution is
The Complete Solution is 
Example:
Solve 
Solution:
The auxiliary equation is 


 The C.F is
The C.F is

But 
 The Complete Solution is
The Complete Solution is 
Example:
Solve 
Solution:
The auxiliary equation is


 The C.F is
The C.F is


 [By parts]
[By parts]



 The Complete Solution is
The Complete Solution is 
Example:
Solve 
Solution:
 The auxiliary equation is
The auxiliary equation is 

 The C.F is
The C.F is
Here  ,
,  ,
,  . Let
. Let 
Now, 

 Put
Put 



Multiply by  in the numerator and denominator
in the numerator and denominator
Put 


 The Complete Solution is
The Complete Solution is 
Example:
Solve 
Solution:
The auxiliary equation is

 The C.F is
The C.F is
Now, 

And 
 The Complete Solution
The Complete Solution 
Example:
Solve 
Solution:
The auxiliary equation is

 The C.F is
The C.F is




And, 
Now, 
And 
And 
 The Complete Solution is
The Complete Solution is

Key takeaways
- Linear differential equation with constant co-efficient are of the form-

Where  are constants.
are constants.
2. If all the roots are real and distinct, then equation (2) becomes,

3. If two roots are equal 
Then complete solution is given by-

4. If one pair of roots be imaginary, i.e.  then the complete solution is-
then the complete solution is-

Where  and
and 
5. If two points of imaginary roots be equal-

Then the complete solution is-

Suppose dy/dx = f(x, y) is a first order ODE and with the initial condition y(0) = 0 and if f and  are continuous on rectangle R for which the
are continuous on rectangle R for which the  then
then  where y =
where y =  is the unique solution to this initial value problem.
is the unique solution to this initial value problem.
Now the functions  are successive approximations of the unique solution y =
are successive approximations of the unique solution y =  .
.
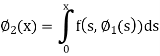
Hence we begin with  , and the other functions can be find by using the formula given below
, and the other functions can be find by using the formula given below
Example: By using the method of successive approximation find the functions  of the following differential equation
of the following differential equation

With the initial condition y(0) = 0.
Sol:
Suppose  , here f is continuous on all of
, here f is continuous on all of  and
and  is continuous on all of
is continuous on all of  , hence the unique solution exists.
, hence the unique solution exists.
Now define 
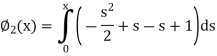
Here we will calculate the three approximations,

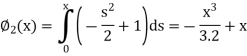
Similarly
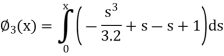
Now the third approximations will be

Example: By using the method of successive approximation find the functions  of the following differential equation
of the following differential equation
With the initial condition y(0) = 0.
Sol:
Suppose  , here f is continuous on all of
, here f is continuous on all of  and
and  is continuous on all of
is continuous on all of  , hence the unique solution exists.
, hence the unique solution exists.
Now define 
Here we will calculate the three approximations,
Now
And
References:
1. Erwin Kreyszig, Advanced Engineering Mathematics, 9thEdition, John Wiley & Sons, 2006.
2. Advanced engineering mathematics, by HK Dass
3. Differential equations, Shepley L. Ross, Willey India.
4. Partial differential equations, Phoolan Prasad, Renuka ravindran, John Willey & Sons




