UNIT 4
Digital Fundamentals
A Cathode Ray Oscilloscope (CRO) is an instrument generally used in a laboratory to display, measure and analyze various waveforms of electrical circuits. A cathode ray oscilloscope is a very fast X-Y plotter that can display an input signal versus time or another signal.
Cathode ray oscilloscopes use luminous spots which are produced by striking the beam of electrons and this luminous spot moves in response variation in the input quantity. The reason behind this is low effects of beam of electrons that can be used for following the changes in the instantaneous values of rapidly changing input quantity. The general forms of cathode ray oscilloscope operate on voltages.
So, the input quantity is voltage.
Construction of Cathode Ray Oscilloscope
The main part of cathode ray oscilloscope is cathode ray tube which is also known as the heart of cathode ray oscilloscope.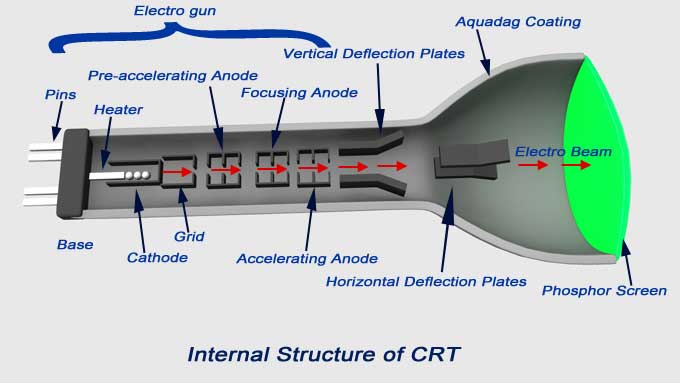
Basically, the cathode ray tube consists of five main parts:
- Electron gun
- Deflection plate system
- Fluorescent screen
- Glass envelope
- Base
Electron Gun:
It is the source of accelerated, energized and focused beam of electrons. It consists of six parts namely heater, a cathode, a grid, a pre-accelerating anode, a focusing anode and an accelerating anode.
In order to obtain the high emission of electrons the layer of barium oxide (which is deposited on the end of cathode) is indirectly heated at moderate temperature.
The electrons after this passes through a small hole called control grid which is made up of nickel. As the name suggests the control grid with its negative bias, controls the number of electrons or indirectly we can say the intensity of emitted electrons from cathode.
After passing through the control grid these electrons are accelerated with the help of pre-accelerating and accelerating anodes. The pre-accelerating and accelerating anodes are connected to a common positive potential of 1500 volts.
Now after this the function of the focusing anode is to focus the beam of the electrons so produced. The focusing anode is connected to adjustable voltage 500 volts. Now there are two methods of focusing the electron beam and are written below:
- Electrostatic focusing.
- Electromagnetic focusing.
Here we will discuss electrostatic focusing method in detail.
Electrostatic Focusing
We know that the force on an electron is given by – qE, where q is the charge on electron (q = 1.6 × 10-19 C), E is the electric field intensity and negative sign shows that the direction of force is in opposite direction to that of electric field.
Case One
In this case we are having two plates A and B as shown in the figure.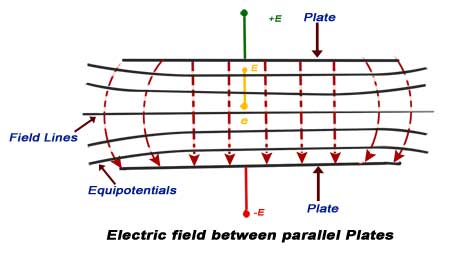
The plate A is at potential +E while the plate B is at potential –E. The direction of electric field is from A plate to plate B at right angle to the surfaces of the plate. The equipotential surfaces are also shown in the diagram which is perpendicular to the direction of electric field . As the beam of electron passes through this plate system, it deflects in the opposite direction of electric field. The deflection angle can be easily varied by changing the potential of the plates.
Case Second
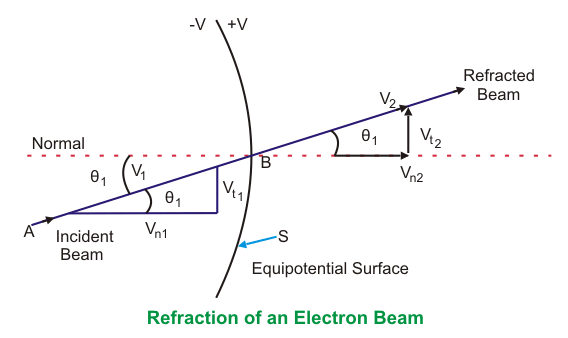
Here we have two concentric cylinders with a potential difference applied between them as shown in the figure.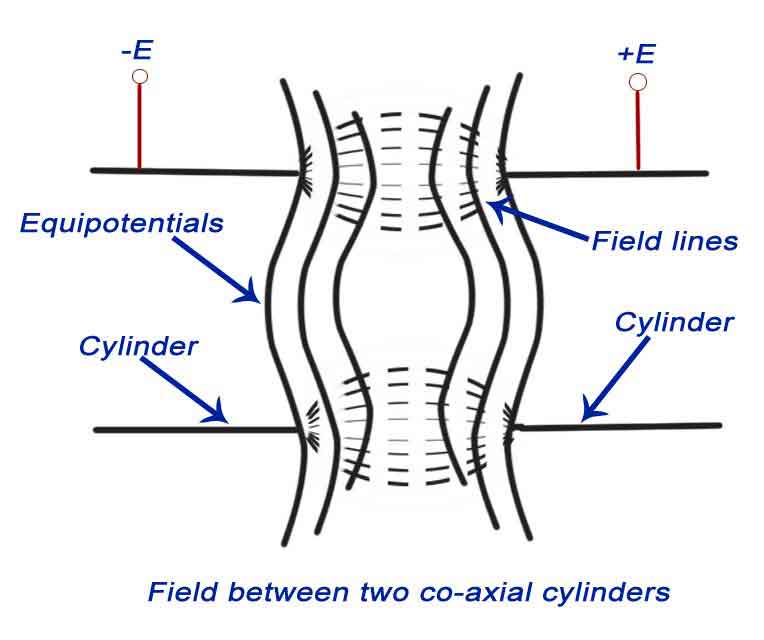
The resultant direction of electric field and the equipotential surfaces are also shown in the figure. The equipotential surfaces are marked by the dotted lines which are curved in shape. Now here we are interested in calculating the deflection angle of electron beam when it passes through this curved equipotential surface.
Let us consider the curved equipotential surface S as shown below. The potential on the right side of the surface is +E while the potential on the left side of the surface –E.
When a beam of electron is incident at angle A to the normal then it deflects by angle B after passing through the surface S as shown in the figure given below. The normal component of velocity of the beam will increase as force is acting in s direction normal to the surface.
It means that the tangential velocities will remain same, so by equating the tangential components we have V1sin (A) = V2sin(B), where V1 is the initial velocity of the electrons, V2 is the velocity after passing through the surface. Now we have relation as sin(A)/sin(B)=V2 / V1.
We can from the above equation see that there is bending of the electron beam after passing through the equipotential surface. Therefore, this system is also called focusing system.
Electrostatic Deflection
In order to find out the expression for the deflection, let us consider a system as shown below: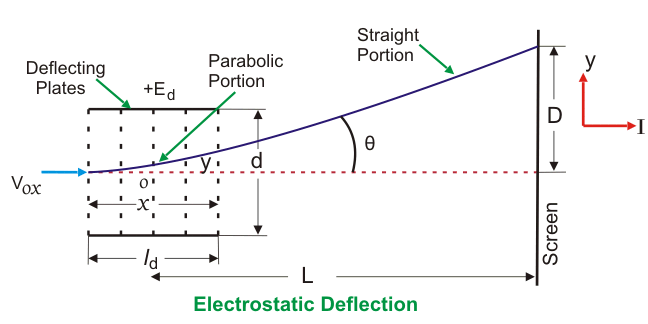
In the above system we have two plates A and B which are at potential +E and 0 respectively. These plates are also called deflection plates. The field produced by these plates is in the direction of positive y axis and there is no force along the x-axis. After deflection plates we have screen through which we can measure net deflection of the electron beam.
Now let us consider a beam of electron coming along the x-axis as shown in the figure. The beam deflects by angle A, due presence of electric field and deflection is in the positive direction of y axis as shown in the figure. Now let us derive an expression for deflection of this beam.
By the conservation of energy, we have loss in potential energy when the electron moves from cathode to accelerating anode should be equal to gain in kinetic energy of electron. Mathematically we can write,
EE = ½ mv ½ -----------------------------------(1)
Where, e is the charge on electron,
E is the potential difference between the two plates,
m is the mass of electron,
and v is the velocity of the electron.
Thus, eE is loss in potential energy and 1/2mv1/2 is the gain in kinetic energy.
From equation (1) we have velocity v = (2eE/m)1/2.
Now we have electric field intensity along the y axis is E/d, therefore force acting along the y axis is given by F = eE/d where d is the separation between the two deflection plates.
Due to this force the electron will deflect along the y axis and let the deflection along y axis be equal to D which is marked on the screen as shown in the figure.
Due to the force F there is net upward acceleration of the electron along positive y axis and this acceleration is given by Ee/(d × m).Since the initial velocity along positive y direction is zero therefore by equation of motion we can write the expression of displacement along y axis as,
y = ½ (Ee/ m x d) x t 2 -----------------------------------------(2)
As the velocity along the x direction is constant therefore we can write displacement as,
x = u x t ----------------------------------------------------------(3)
Where, u is velocity of electron along x axis.
From equations 2 and 3 we have,
y=1/2 (eE/mu 2) x x2 --------------------------------------------(4)
Which is the equation of trajectory of the electron. Now on differentiating the equation 4 we have slope i.e.
Dy/dx = eEl/mu 2 -----------------------------------------------------------(5)
where, l is the length of the plate.
Deflection on the screen can be calculated as,
D = L x dy/dx
Distance L is shown in the above figure. Final expression of D can be written as,
D = L l E / 2dE
From the expression of deflection, we calculate deflection sensitivity as,
D/E = L I / 2dE
Graticule: These are the grid of lines whose function is to serve as a scale when the cathode ray oscilloscope is used for the amplitude measurements. There are three types of graticules and they are written below:
- Internal Graticule:
Internal graticule as name suggests deposited on the internal surface of the cathode ray tube face plate. There is no problem of parallax errors but we cannot change internal graticules as they are fixed. - External graticule:
Given below is the circuit diagram of cathode ray oscilloscope: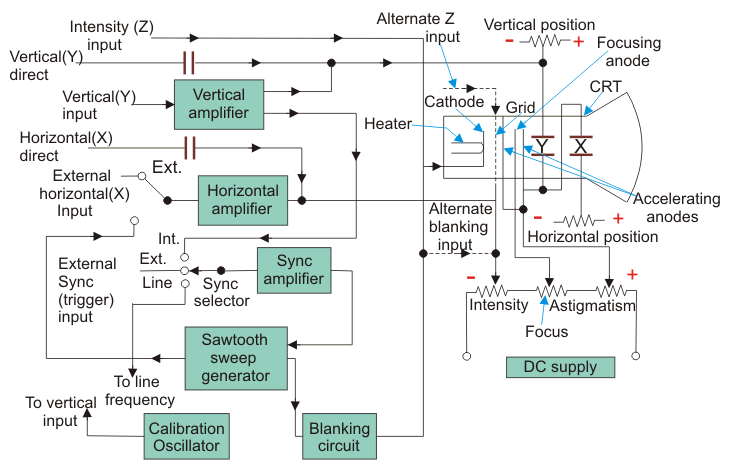
Basic Circuit Diagram of Cathode Ray Oscilloscope
Now we will study the basic circuit diagram of cathode ray oscilloscope under the following main parts.
- Vertical Deflection System:
The input signal for examining are fed to the vertical deflection system plates with the help of input attenuator and a number of amplifier stages. The main function of these amplifiers is to amplify the weak the weak signals so that the amplified signal can produce the desirable signals. - Horizontal Deflection System:
Like the vertical system horizontal system also consists of horizontal amplifiers to amplify the weak input voltage signals but in contrast to vertical deflection system, horizontal deflection plates are fed by a sweep voltage that provides a time base as shown above. As shown in the circuit diagram, the saw tooth sweep generator is triggered by the synchronizing amplifier when the sweep selector switch is in the internal position and thus the triggered saw tooth generator gives input to the horizontal amplifier by following this mechanism. Now there are four types of sweeps:- Free Running or Recurrent Sweep
As the name suggests, the saw tooth waveform is repetitive i.e. a new sweep is started immediately after the previous sweep. - Triggered Sweep
Some time the waveform to be observed may not be periodic so it is desired that the sweep circuit remain inoperative and the sweep be initiated by the waveform under examination. In such cases we use triggered sweep. - Driven Sweep
Generally a driven sweep is used where the sweep is free running but triggered by the signal under test. - Non Saw Tooth Sweep
This is used for finding the phase difference between the two voltages. Another important application is that we can compare frequency of input voltages using non saw tooth sweep.
- Free Running or Recurrent Sweep
- Synchronization:
There must be synchronization between the sweep and the signal being measured. Synchronization is done to produce stationary pattern. There are three sources of synchronization which can be selected by synchronization selector and they are written below:- Internal
In this trigger is obtained from the signal being measured through vertical amplifier. - External
In this trigger an external trigger source is required. - Line
In this method trigger is obtained power supply. - Intensity Modulation
Intensity modulation can be done by inserting the signal between the ground and the cathode. Intensity modulation causes the brightening of the display. - Positioning Controls
Position can be control by applying small independent internal direct voltage sources to the deflecting plates and with the help of potentiometer (using it as voltage divider) we can control the position of signal. - Focus Control
Focus can be controlled by changing the focal length of the focusing electrode which acts like a lens and focal length can be changed by the changing potential of the focusing anode. - Intensity Control
The intensity can be varied by changing the grid potential with respect to cathode. - Calibration Circuit
Calibrating voltage has a square shape which is usually internally generated of known amplitude. - Astigmatism
By adjusting the focus the spot can be made sharp in order to avoid the problem of astigmatism.
- Internal
AM TRANSMITTER
AM transmitter generates high power and its primary requirement is efficiency.
Here, AM is produced is of very low power.
Although the methods of generating AM described here relate to both applications and emphasis will be put on methods of generating high powers.
In an AM transmitter, amplitude modulation can be generated at any point after the radio frequency source.
Actually, even a crystal oscillator could be amplitude modulated, except that this would be an unnecessary interference with its frequency stability.
lf the output stage in a transmitter is collector modulated in a low power transmitter, the system is called high level modulation.
lf modulation is applied at any other point, including some other electrode of the output amplifier, then so called low level modulation is produced.
Naturally, the end product of both systems is the same, but the transmitter circuit arrangements are different .
The higher the level of modulation, the larger the audio power required to produce modulation.
The higher-level system is a disadvantage in this regard.
On the other hand, the output stage is modulated, each following stage must handle a sideband power as well as the carrier.
All these subsequent amplifiers must have sufficient bandwidth for the sideband frequencies.
Each of the systems have one great advantage i.e. low modulating power requirements in one case, and much more efficient RF amplification with simpler circuit design in the other.
lt is found that a collector~modulated class C amplifier tends to have better efficiency, lower distortion and much better power-handling capabilities than a base-modulated amplifier. Because of these considerations, broadcast AM transmitters today almost invariably use high-level modulation.
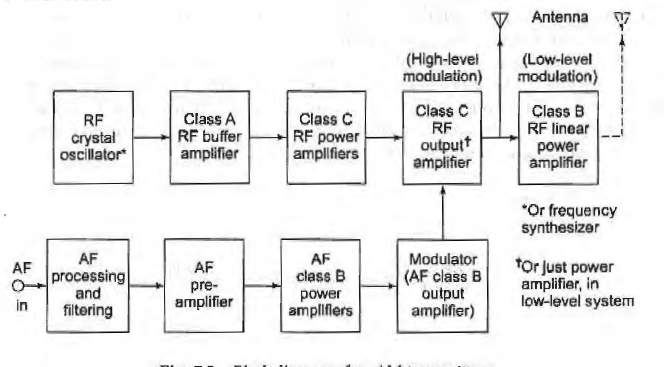
Fig. AM Transmitter (ref 3)
AM Receiver :-
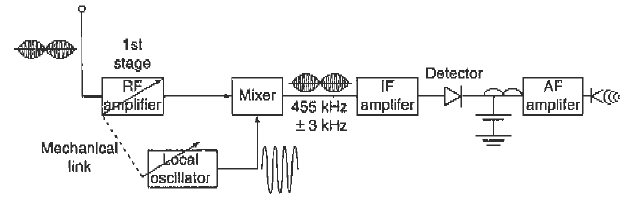
Fig. Superheterodyne AM receivers (ref 3)
The signal is received by the RF amplifier which is a wideband class A amplifier whose resonant frequency response curve can be tuned from 540 kHz to 1650 kHz .
The modulated signal is amplified and fed to the mixer stage which is a class C circuit capable of producing the sum, difference, and original frequencies, and which receives signals from two sources namely the RF amplifier and the local oscillator.
The unmodulated signal from the local oscillator is further fed to the mixer where simultaneously it is mixed with the modulated signal received from the RF amplifier.
The local oscillator (LO) is a tunable circuit with a tuning range that extends from 995 kHz to 2105 kHz.
The output from the mixer circuit is then connected to the intermediate frequency amplifier (IF amp) which amplifies a narrow band of select frequencies (455 kHz± 3 kHz).
In some receivers this class A circuit acts not only as an amplifier but also as a filter for unwanted frequencies which would interfere with the selected one.
This new frequency contains the same modulated information as that transmitted from the source but at a frequency range lower than the standard broadcast band.
This process helps to reduce the unwanted interference from outside sources.
The signal is further rectified and filtered to eliminate one sideband and is finally amplified for listening.
F.M. Transmission :-
A signal is described by its amplitude freqn and phase. Frequency and phase constitute the angle.
In angle modulation the freqn or phase of carrier is varied according to the message / modulating signal.
The method of angle modulation in which freqn of carrier is varied is called freqn modulation ( FM ).
The method of angle modulation in which phase of carrier is varied is called phase modulation ( PM ).
FM is more popular than AM and is useful for high fidelity broadcasting of audio & other applications.
The Advantages of FM are :
1>. It has better noise immunity
2>. The performance of FM is better at low power
3>. Transmission bandwidth is not affected by msg signal bandwidth.
The Disadvantages of FM are :
P.M. & F.M. Are nonlinear modulation techniques. Hence the analysis of angle modulation is complex and we have to rely on approximate analysis.
Angle modulated signal theoretically has infinite bandwidth even for band limited signals. Hence we have talk about effective bandwidth. This effective bandwidth is much higher than that required in AM.
F.M. Reception :-
The FM receiver is also a super heterodyne receiver like AM. But following considerations are required for an FM receiver.
1>. The operating frequency of FM is higher compared to AM.
2>. Different detection or demodulation technique will be required for FM.
3>. There will be need for amplitude limiting & de-emphasis in FM.
4>. Different method of obtaining AGC is required.
Mixer Uses colpits &clapp oscillator for VHF range.
If ampr If = 10.7 MHz with BW 200 KHz gain low use two If stages to improve gain.
References:
- Basic Electrical Engineering” by C L Wadhwa.
- “ Basic Electrical Engineering” by Mehta V K and Mehta Rohit.
- “ Basic Electrical Engineering” by Nagrath, I and Kothari.




