UNIT - 8
Introduction to State variable analysis
8.1.1 Concepts of state, state variable
The state of a system is a minimal set of variables known as state variables. The knowledge of these variables at any instance of time together with the knowledge of the inputs for the same instance of time, determines the complete behaviour of the system. The fewer drawbacks in the transfer function method for representing any system led to the use of state variables in analysis of system. Few advantages are listed below:
- The state space can be used for linear or nonlinear, time-variant or time-invariant systems.
- It is easier to apply where Laplace transform cannot be applied.
- The nth order differential equation can be expressed as 'n' equation of first order.
- It is a time domain method.
- As this is time domain method, therefore this method is suitable for digital computer computation.
- On the basis of the given performance index, this system can be designed for an optimal condition.
Representation of state space: The system shown below has ‘m’ inputs, ‘p, outputs and ‘n’ number of state variables. The state equation gives us the relation between the state variables and the inputs.
|
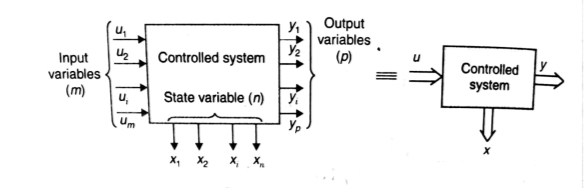
Fig 1 Representation of State space
So, the above system shown can be described through equations as
The above set of equations can be represented as
As we are concerned for time invariant system, for which the term
|









The above equation can be represented in matrix form as given below
|
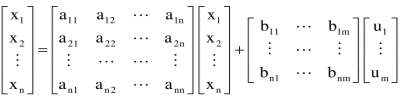
(4)
The above coefficients aij and bji in equation (4) can be written in vector matrix form as
The output of the system can be represented by linear combination of state variables and inputs. y1=c11x1(t)+c12x2(t)+…….+c1nxn+d11u1+………..+d1mum y2=c21x1(t)+c22x2(t)+…….+c2nxn+d21u1+………..+d2mum yr=cr1x1(t)+cr2x2(t)+…….+crnxn+dr1u1+………..+drmum (6)
|

The equation (6) can be represented in matrix form as 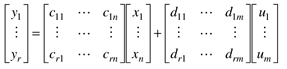 (7)
(7)
Where coefficients cij and dji are constants. The output equation is given as
Y=CX+DU (8)
Key takeaway
- The state equation is given as
 =Ax(t)+Bu(t)
=Ax(t)+Bu(t) - The output equation is given as Y=CX+DU
8.1.2 State models for electrical systems
The state variables selected here are the physical quantities of the system, which can be measured. The selection of these variables can be directly related to the physical system because the solution of state equation is related to the time variation of the system variables.
The number of energy storing elements in any system is equal to the number of state variables. Below shown are few electrical circuits, just to brush up the concept of energy storing elements and state variable relation.
|
|
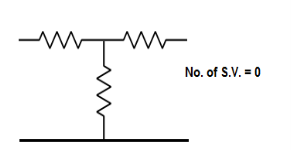
|
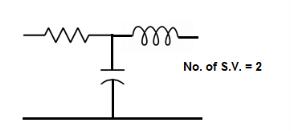
Fig 2 Electrical Circuits with energy storing elements
Now calculating the state equation and output equation for state variable analysis.
State Equation and Output equation:
Number of output=Number of output equation
|
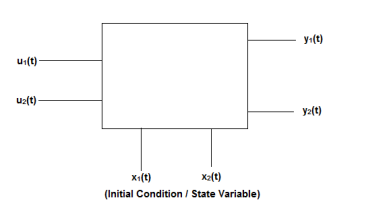
Fig 3 State Model
Considering multiple input and multiple output system, with two inputs u1(t)and u2(t), and two outputs y1(t) and y2(t) respectively.
y1(t)=c11x1(t)+c12x2(t)+d11u1(t)+d12u2(t) y2(t)=c21x1(t)+c22x2(t)+d21u1(t)+d22u2(t) |
|

The output equation is given as
Y(t)=CX(t)+DU(t)
Y(t)= C= U(t)=
|





# Now finding State Equation
Number of energy storing elements= Number of state variables
|





The state equation is then given as
 =Ax(t)+Bu(t)
=Ax(t)+Bu(t)
Key takeaways
- The number of energies storing element= Number of state variables
- We should always take voltage across the inductor L, and current through capacitor C.
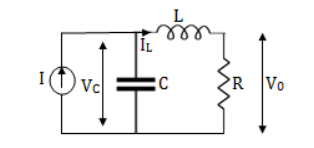
Question: Obtatin the state space representation for the given electircal system
|
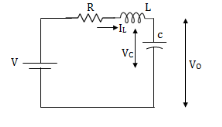
Solution: The state model is given as
|
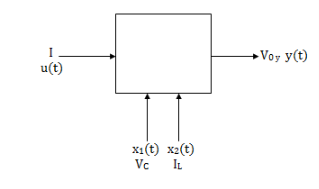
Fig 4 State Model
The state model shows that there are two energy storing elements L, C. As we already know that Number of state variables is equal to the number of energy storing elements.Hence we have two state variables[x1(t) and x2(t)]. We have one output V0(taken across capacitor) and input u(t).
The output equation is then given as
Y(t)=CX(t)+DU(t) V0=Vc= x1(t) ….(a) Hence output equation becomes V0= x1(t) y(t)=[1 0] so, C=[1 0] D=[0] Now writing the state equation
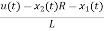
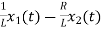
For that applying KVL in the above circuit V=ILR+L State Equation is
|






x1(t)=Vc
IL=C
VL=L
From KVL L
From equation (b) and (c)
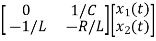
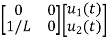
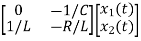
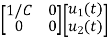
Now writing the state equation
Hence A=
|




























Question: Obtatin the state space representation for the given electircal system
|
Solution: The state model shows that there are two energy storing elements L, C. As we already know that Number of state variables is equal to the number of energy storing elements.Hence we have two state variables[x1(t) and x2(t)]. We have one output V0(taken across capacitor) and input u(t).
|
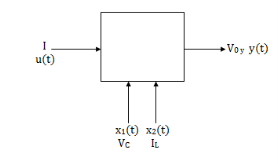
Fig 5 State Model
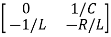
Here output is V0. But from above electrical circuit V0=ILR V0=x2(t)R y(t)= V0= [0 R] The output equation is given as Y(t)=CX(t)+DU(t) C=[0 R] D=[0] Now finding state equation,we apply KCL in the given electrical circuit I=IC+IL
But I-IL=IC
Applying KVL in the given electrical circuit we get VC=VL+ILR VC-ILR=VL=L |



















From equation (b) and (c) we have Now writing the state equation
Hence A= Note: We should always take voltage across the inductor L, and current through capacitor C. |








Solution of homogeneous state equations
The first order differential equation is given as
x(t)= Consider state equation
The solution will be of the form x(t)=a0+a1t+a2t2+a3t3+….+aiti substituting value in above equation a1+2a2t2+3a3t3+……….=A[a0+a1t+a2t2+a3t3+….+aiti] a1=Aa0 a2= ai= Solution for x(t) will be x(t)=[I+At+ The matrix exponential form can be written as
The solution x(t) will be x(t)=
Multiplying both sides by |


















Integrating both sides w.r.t t we get
Multiplying both sides by x(t)=
At t=t0 x(t)= The above equation is the required solution Solution of non-homogeneous state equation Let the scalar state equation be
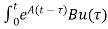
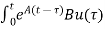
Multiplying both sides by e-at x(t) = eat x(0) + Then for non-homogeneous state equation
The solution x(t) can be given as x(t) = eAt x(0) + The above equation is the required solution. |




















Key takeaway
- Then for non-homogeneous state equation
 =Ax+Bu
=Ax+Bu
2. The solution x(t) can be given as
x(t) = eAt x(0) + d
d
The above equation is the required solution.
3. Then for homogeneous state equation
x(t)= x(t0)+
x(t0)+ d
d
The above equation is the required solution
1. “Modern Control Engineering “, K. Ogata, Pearson Education Asia/
PHI, 4th Edition, 2002.
2. “Automatic Control Systems”, Benjamin C. Kuo, John Wiley India
Pvt. Ltd., 8th Edition, 2008.
3. “Feedback and Control System”, Joseph J Distefano III et al.,
Schaum’s Outlines, TMH, 2nd Edition 2007.
4. J. Nagarath and M. Gopal, “Control Systems Engineering”, New Age
International (P) Limited, Publishers, Fourth edition – 2005




