Unit - 7
Z transforms
In the discrete time- domain the signal is defined as a sequence of real or complex numbers which is then converted to the z-domain by the process of z-transform. The z-transform is important technique, used in areas of signal processing, system design and analysis and control theory. The formula used to convert a discrete time signal x[n] to X[z] is as follows: X(z) = where x[n] is the discrete time signal and X[z] is the z-transform of the discrete time signal. Z-transform comes in two parts. The first part is the formula as shown above The second part is to define a region of convergence for the z-transform. Both parts are needed for a complete z-transform as a z-transform without a ROC would not be of much help in signal processing. Key Takeaways:
|

The Z transform for discrete time system x(n ) is defined as
X(z) =
In polar form z can be expressed as
z = r e jw ---------------(2) where r is the radius of a circle.
For n≥ 0
X(z ) =
By substituting z = r e jw
X(r e jw) =
Equation(5) represents the Fourier transform of the signal x(n) r-n
Hence the inverse DTFT X(r ejw) must be x(n) r-n.
x(n) r-n = 1/2π
On multiplying both sides by rn we get
x(n) = 1/ 2 π
Let z= r e jw and dw= dz/jz
dz = r ejw dw
dw = dz/jre jw
x[n] = 1/ 2πj
Example
Find the z-transform for the sequence
x[n] = 2
Solution:
X(z) = 2 + 3 z-1 + 5 z -2 + 2 z -3
Example
If X(z)= 4 – 5 z-2 + z-3 – 2z -4 then find x[n]
Solution:
x[n] = 4
Key Takeaways:
|













Find the z-transform and ROC of the signal
x(n) = an u(n)
Solution:
X(z) =
= 1 for n≥0
=
=
This is a geometric series of infinite length that is
a + ar + ar2 + ………….. ∞ = a /1-r if |r| <1
Then from equation (3) it converges when |az-1| < 1 or |z| >|a|
Therefore
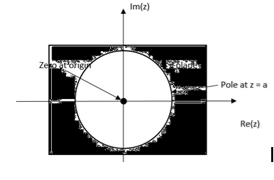
X(z) = 1/ 1-az-1: ROC |z| > |a|
Figure 1. ROC |z| > |a|
Find the z-transform of the signal x(n) =-b n u(-n-1). Find ROC
X(z) =
X(z) = = 1 for n ≤ -1 =
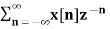
= b-1z/1- b-1z = z/ z-b = 1/ 1-bz-1 |z| < |b|
Figure 2 . ROC |z| < |b|
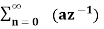
Find the z-transform of x(n) = an u(n) – bn u(-n-1)
X(z) =
=
= z/z-a + z/z-b ROC |a| < |z| < |b|
Figure 3. |a|<|z|<|b|
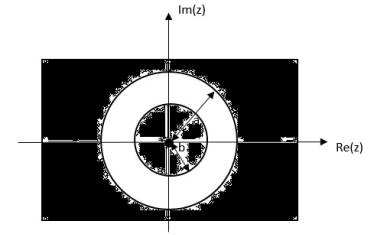
|b|< |a|
Figure 4. |b| >|a|
Key Takeaways:
|






It states that
Proof: Z{ a a x(n) + b y(n)} = = a = a X(z) + b Y(z)
If X(z) = Z{x(n)} and the initial conditions for x(n) are zeros then
Z{ x(n-m)} = z -m X(z)
Where m is positive or negative integer
Proof:
Z{x(n-m)} =
= z -m
Let (n-m) =l then we have
Z{x(n-m) = z -m
= z -m X(z)
Multiplication by an exponential sequence Z{ a n x(n) } = a n
Differentiation in Z-Domain OR Multiplication by n Property Differentiating the z-transform we get -z dX(z) /dz = Where x(n) * h(n) = convolution Interchange the order of summation Replace (n-k) by l in summation we get If X1(z) = Z{x1(n)} and X2(z) = Z{x2(n)} then
Initial Value Theorem If X+(z) = Z{x(n)} then x(0) = lim z->∞ X+(z)
Proof: X+(z) =
As z-> ∞ all the terms vanish except x(0) which proves the theorem Ie Lim z-> ∞ X+(z) = lim z-> ∞
Final Value Theorem If X+(z) = Z{x(n)} where ROC for X+(z) includes but is not necessarily confined to |z| >1 and (z-1) X+(z) has no poles on or outside the unit circle then x(∞) = Lim z->1 (z-1) X+(z) Z{ x(n+1) – Z{x(n)} = Lim k-> ∞ Z X+(z) – z x(0) – X+(z) = Lim k-> ∞ (z-1) X+(z) – zx(0) = Lim k-> ∞ Let z-> 1 we get Lim z->1 (z-1) X+(z) – zx(0) = Lim k-> ∞ Lim z->1 (z-1) X+(z) – x(0) = Lim n-> ∞ { [x(1) -x(0)] + [x(2) -x(1)] +……+[x(n+1)-x(n)]} = x(∞) – x(0) Therefore, x(∞) = limz->1 (z-1) X+(z) this can be written as x(∞) = lim z->1 (1-z-1) X(z)
This theorem enables us to find the steady state of x(n) without solving the entire sequence.
Find the z-transform of x(n) = [3(3) n – 4(2) n ] u(n)
=
= 3
The first power series converges when |3z -1| <1 that is |z| > 3 . The second power series converges when |2z-1| <1 or |z| >2. Hence X(z) converges for |z|>3 . Now X(z) = 3/1-3z-1 -4/1-2z-1 = 3z/z-3 – 4z/z-2 . Find the z transform of x(n) = cos n = ½ [ Both the series converges if [ e j Now X(z) = ½ [ 1/1 – e j = ½ [ 1 – e -j e j = ½ [ 2 – 2 z -1 cos = 1-z-1 cos
The z-transform of unit step sequence is given by
Z{u(n)} = z/z-1
Z{ n u(n)} = -z d/dz (z/z-1)
= z/(z-1)2
x(n ) = rn (sin w0n ) u(n)
Z{(sin w0n ) u(n)} = sin w0 z-1/ 1 -2 (cos w0) z-1 + z-2
Z{ an x(n)} = X(a-1 z)
Therefore
Z{ rn sin(w0n) u(n) } = (sin w0) (r-1 z)-1/ 1- 2 (cos w0)(r-1z)-1 + (r-1z)-2
= r(sinw0) z-1/ 1-2r(cos w0) z-1 + r2 z-2
X(z) = log(1- az-1)
X(z)= log(1-az-1)
Differentiating both sides we get
d/dz X(z) = 1/1-az-1 (a z-2) = az-2/1- az-1
-z d/dz { X(z)} = -az-1/1-az-1
= -az-1[ 1/1-az-1]
= -a Z[ a n-1 u(n-1)] -------- (1)
From differentiation property
Z{ n x(n)} = -z d/dz [ X(z)] ------- (2)
Comparing (1) and (2) we get
n x(n) = -a [ a n-1 u(n-1)]
or x(n) = -a [a n-1 u(n-1)]/n
x(n) =1/2 (n2 + n) (1/3) n-1 u(n-1)
=½ n2 (1/3) n-1 u(n-1) +1/2 n (1/3) n-1 u(n-1)
We know that
Z[(1/3) n u(n)] = z/ z-1/3
Using time-shifting property
Z{(1/3) n-1 u(n-1)] = 1/ z- 1/3
Z [ n (1/3) n-1 u(n-1)] = -z d/dz [1/z-(1/3)]
=-z d/dz( 1/z-1/3)= -z [-1/(z-1/3) 2]= z/ (z-1/3)2
Z [ n2 (1/3) u(n-1)] = -z d/dz [ z/(z-1/3)2]
= z(z+1/3)/(z-1/3)2
= -z [ (z-1/3)2 -2z(z-1/3)/(z-1/3)4
= z(z+1/3)/(z-1/3)3
X(z) = ½[z(z+1/3)/(z-1/3)3 + z/ (z-1/3)2]
= z2/(z-1/3)3
Key Takaways:
|

















































When analysis is required in discrete format, we convert frequency domain signal back into discrete format through inverse Z-transformation. There are four ways to determine the inverse Z-transformation.
In this method, the Z-transform of the signal x (z) can be represented as the ratio of polynomial as shown below;
x(z)=N(Z)/D(Z) Now, if we go on dividing the numerator by denominator, then we will get a series as shown below X(z)=x(0)+x(1)z−1+x(2) z−2+......... The above sequence represents the series of inverse Z-transform of the given signal for n≥ and the above system is causal. However, for n<0 the series can be written as; x(z)=x(−1)z1+x(−2)z2+x(−3)z3+......... Partial Fraction Expansion Method Here also the signal is expressed first in N (z)/D (z) form. If it is a rational fraction it will be represented as follows; x(z)=(b0+b1z−1+b2 z-2 + …… + bm z -m ) / ( a0 + a1 z-1 + a2 z-2 + ……….an z-n ) The above one is improper when m<n and an≠0 If the ratio is not proper i.e. Improper then we have to convert it to the proper form to solve it. Residue or Contour Integral Method In this method, we obtain inverse z-transform x(n) by summing residues of [x(z)Zn−1] at all poles. Mathematically, this may be expressed as
x(n)= Here, the residue for any pole of order m at z=β is
Residues = 1/ (m-1) ! lim { d m-1 / dZ m-1 { (z-β) m X(z) Z n-1 }
Convolution Method In this method given X(z) is divided into X1(z) and X2(z) such that X(z) = X1(z) X2(z). Next we find x1(n) and x2(n) by taking inverse z transform of X1(z) and X2(z) . From convolution property we know that Z[ x1(n) *x2(n)] = X1(z) X2(z) = X(z)
Problems : Find the inverse z transform of X(z) = z+0.2/ (z+0.5) (z-1) |z|>1 X(z) = z+0.2 / z2 -0.5z -0.5 Divide the numerator by denominator z-1 + 0.7 z-2 + 0.85 z-3 + 0.775 z-4
z+0.2
0.7 + 0.5 z-1
0.85 z -1 + 0.35 z-2 0.85 z-1 -0.42 z-2 -0.425 z-3
0.775 z -2 + 0.425 z-3 0.775 z-2 -0.387 z-3 – 0.3875 z-4
X(z) = z-1 + 0.7 z-2 + 0.85 z-3 + 0.775 z -4 + …………………………….
Using long division method Find the inverse z-transform of the sequence of
X(z) = z+1 z2 +3z + 2
z-1 + 4z-2 + 10 z-3 +22 z-4
z2 -3z +2 z+1 z- 3 + 2z-1 4 – 2z-1 4 – 12 z-1 + 8 z-2 10z-1 – 8z-2 10 z-1 – 30z-2 +20 z-3 22 z-2 – 20 z-3 22 z-2 -66 z-3 +44 z-4 46 z-3 – 44 z-4
X(z) = z-1 + 4 z-2 + 10 z-3 + 22z-4
x(n) = { 0,1,4,10,22………}
Find the inverse z transform of X(z) = 1+3 z-1 / 1 + 3 z-1 + 2 z-2 by partial fraction method.
X(z) = z(z+3)/ z2 + 3z+2 = z(z+3)/ (z+1)(z+2)
X(z)/z = z+3/ (z+1)(z+2)
X(z)/z = C1/z+1 + C2/ z+2
By solving we get C1 =2 and C2 =-1
X(z)/z = 2/ z+1 -1/z+2
X(z) = 2 . z/z+1 – z/z+2
x(n) = 2(-1) n u(n) – (-2) n u(n)
Find the partial fraction method of
X(z) = ¼ z-1 (1 – ½ z-1)(1-1/4 z-1)
X(z) = A + B Z (1-1/2z-1) (1 – ¼ z-1)
By solving A= 1 and B=-1
Therefore,
X(z) = z - z z-1/2 z-1/4
x(n) = (1/2) n u(n) – (1/4) n u(n)
Find the partial fraction of
X(z) = 1 1+ z-1 + z-2
X(z) = z z2 + z + 1 = z (z + 0.5 +j 0.866)(z+0.5 – j0.866)
X(z) = c + c* z z-(-0.5 +j0.866) z – (- 0. 5 – j 0.866)
X(z) = 0.5+j0.288 + 0.5 – j 0.288 z z-(-0.5 +j0.866) z – (- 0. 5 – j 0.866)
X(z) = 0.5+j0.288 z + 0.5 – j 0.288 z z-(-0.5 +j0.866) z – (- 0. 5 – j 0.866)
By taking inverse z-transform both sides we get
= (0.5+j0.288)( (-0.5 +j0.866) n u(n) +(0.5+j0.288)( (-0.5 -j0.866) n u(n
Find the inverse z transform of X(z) = 1/ 1-3z-1 + 2z-2 using convolution method. X(z) = 1/ 1-3z-1 + 2z-2
X1(z) = 1/ 1-z-1 X2(z) = 1/ 1-2z-1
We know that u(n) = 1/ 1-z-1
x2(n) = 2 n u(n) we know that
x(n) = x1(n) * x2(n)
=
=
=
= 2 n [ 1 – (1/2) n+1 / 1-1/2 ] u(n)
= [2 n+1 – 1] u(n)
If x(n) = x1(n) * x2(n) where x1(n) = (1/3)n u(n) and x2(n) = (1/5)n u(n). Find X(z) by using convolution property.
X1(z) = 1/ 1- (1/3)z-1 X2(z) = 1/1- (1/5) z-1
X(z) = 1/1-(1/3)z-1 . 1/1-(1/5) z-1
Using z-transform find the convolution of two sequences.
x1(n) = {1,2,-1,0,3} x2(n) = { 1,2,-1}
Z{ x1(n) * x2(n)} = X1(z) . X2(z)
X1(z) = 1 + 2z-1 – z-2 + 3 z-4
X2(z) = 1 + 2z-1 – z-2
(1 + 2z-1 – z-2 + 3 z-4 ) (1 + 2z-1 – z-2 )
= 1 + 4z-1 + 2z-2 – 4 z- 3 + 4 z-4 + 6 z- 5 – 3 z-6
Using convolution method find
X(z) = 1 + 3z-1 1 + 3z-1 + 2z-2
= z(z+3) (z+1)(z+2)
X1(z) = z X2(z) = z+3 = z + z-1 3z z+1 z+2 z+2 z+2
x1(n) = (-1) n u(n)
x2(n) = (-2) n u(n) + 3 (-2) n-1 u(n-1)
x(n) = x1(n) * x2(n)
= (-1) n u(n) * [ (-2) n u(n) + 3 (-2) n-1 u(n-1)]
= (-1) n u(n) * (-2) n u(n) + 3 (-1) n u(n) * (-2) n-1 u(n-1)
=
= (-2)n
= (-2) n
= (-2) n [ 1-(0.5) n+1 ] + 3 (-2) n-1 [ 1- (0.5) n] 1 – 0.5 1 – 0.5 x(n) = [ 2(-1)n – (-2)n] u(n)
Key Takeaways:
|


















References
- Signals and Systems by Simon Haykin
- Signals and Systems by Ganesh Rao
- Signals and Systems by P. Ramesh Babu
- Signals and Systems by Chitode




