Unit - 7
Introduction to kinetics of rigid body
Q1) Explain different types of motion of a rigid body
A1) There are three types of motion of a rigid body
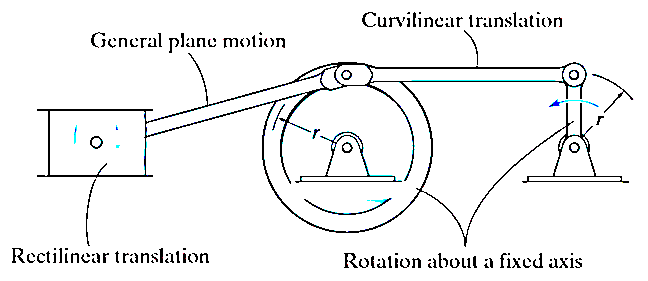
Translation motion
Translation motion occurs when a line (generally axis) in the body remains parallel to its initial orientation throughout the motion.

If the path of motion of any two lines on the rigid body are parallel or are in a straight line, then the translation is termed as rectilinear translation.
If the path of motion of any two lines on the rigid body are along the fixed curve, then the translation is termed as curvilinear translation.
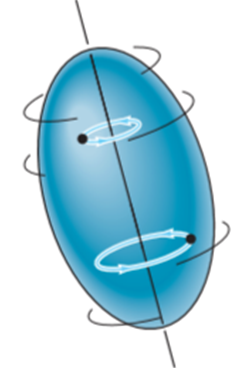
Rotation Motion:
When a rigid body is subjected to the rotation about a fixed axis, as shown in fig below, all the particles of the body, except those which lie on the axis of rotation, move along circular paths whose center lies on the axis of rotation.
General Plane motion:
General plane motion of a rigid body refers to a combination of translation and rotation motion.
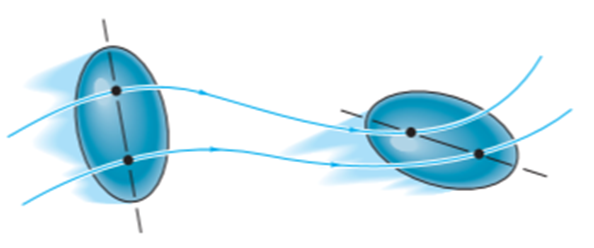
General planar motion refers to the simultaneous rotational and translational motion of a planar body in a 2-D plane.
General planar motion can be fully specified by knowing both the angular rotation of a line fixed in the body and the motion of any point on the body.
Q2) Explain the concept of instantaneous center of rotation.
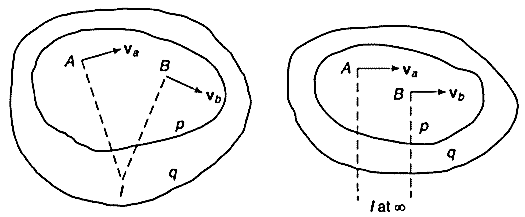
A2) Consider a plane body P having a non-linear motion relative to another plane body q as shown in figure below.
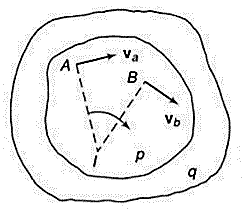
Let the velocities of two points A and B on the plane body P be  and
and  respectively in the direction as shown in figure above.
respectively in the direction as shown in figure above.
The body if in non-linear motion, then at any instant the body can be imagined to be rotating about some point. This point lies on the line perpendicular to the direction of vibration. If we draw perpendicular lines to the direction of velocities at point A and B respectively, then the point of intersection is the point at which the body p is imagined to be rotating. Let this point be 1. Then point 1 is called as instantaneous center of rotation (ICR) for the body p in non-linear motion.
This property of instantaneous center of rotation is true only for an instant and at the next instant, the new point will become the instantaneous point of rotation. This is the reason that this point is not called as center of rotation but instantaneous center of rotation.
ICR is not located at the center of curvature of the path apparently taken by a point of one body relative to other body. In spite of this limitation, ICR is a useful tool for understanding the kinematics of a planar body in non-linear motion or in general plane motion.
If the intersection of the perpendicular lines lies outside planar body, then ICR will also lie outside of the body. If the direction of velocities are parallel to each other, then the perpendicular lines will also be parallel to each other and hence, these lines do not intersect. In such cases, ICR lies at infinity.
The velocity of the body at any point is proportional to the distance of the point from the ICR. Hence, the velocity of point 1 (ICR) itself is zero, as the distance is zero. This implies that, at ICR, the two bodies p and q are relatively at rest. Means, there is no relative motion at ICR between the two bodies.
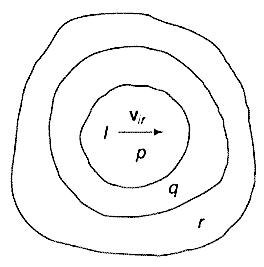
Now, consider the body q is in relative motion to the third body r. The relative motion of ICR with respect to third body r would be same irrespective of the point is considered on body p or q.
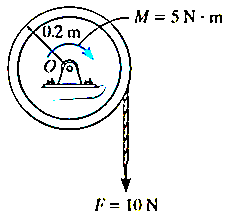
Q3) The 30–kg disk, shown in Figure, is pin supported at its center. Determine the number of revolutions it must make to attain an angular velocity of  starting from rest. It is acted upon by a constant force
starting from rest. It is acted upon by a constant force  which is applied to a cord wrapped around its periphery, and a constant couple moment
which is applied to a cord wrapped around its periphery, and a constant couple moment  . Neglect the mass of the cord in the calculation.
. Neglect the mass of the cord in the calculation.
A3) Kinetic energy:- since the desk rotates about a fixed axis , and it is initially at rest then


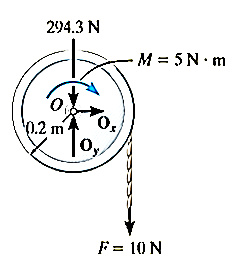
Work(free-body design). As shown in fig. the pin reaction  and the weight (294.3N) do no work , since they are not displaced . the couple moment, having a constant magnitude, does positive work
and the weight (294.3N) do no work , since they are not displaced . the couple moment, having a constant magnitude, does positive work  as the disk rotates through a clockwise angle of
as the disk rotates through a clockwise angle of  rad, and the constant force F does positive work
rad, and the constant force F does positive work  =
= as the cord moves downwards =
as the cord moves downwards =
Principle of work and energy




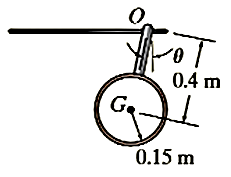
Q4) The 700-kg pipe is equally suspended from the two tines of the fork lift shown in the photo. It is undergoing a swinging motion such that when  it is momentarily at rest. Determine the normal and frictional forces acting on each tine which are needed to support the pipe at the instant
it is momentarily at rest. Determine the normal and frictional forces acting on each tine which are needed to support the pipe at the instant  . Measurements of the pipe and the suspender are shown in Fig. Neglect the mass of the suspender and the thickness of the pipe.
. Measurements of the pipe and the suspender are shown in Fig. Neglect the mass of the suspender and the thickness of the pipe.
A4) We must use the equations of motion to find the forces on the times since these forces do no work. Before doing this, however , we will apply the principle of work and energy to determine the angular velocity of the pipe when
kinetic energy(kinetic diagram).
Since the pipe is originally at rest, then

The final kinetic energy may be computed with reference to either the fixed-point O or the center of mass G. for the calculation we will consider the pipe to be a thin ring so that  . If point G is considered, we have
. If point G is considered, we have


If point O is considered then the parallel -axis theorem must be used to determine  .hence
.hence



Work(free- body diagram)
The normal and frictional forces on the tines do no work since they do not move as the pipe swings. The weight does positive work since the weight moves downward through a vertical distance 
Principle of work and energy



Equations of motion: - referring to the free body and kinetic diagram shown in fig. and using the result for  , we have
, we have



Since 


These are two tines used to support the load, therefore

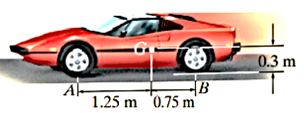
Q5) The car shown in Figure has a mass of 2 Mg and a center of mass at G. Determine the acceleration if the rear “driving” wheels are always slipping, whereas the front wheels are free to rotate. Neglect the mass of the wheels. The coefficient of kinetic friction between the wheels and the road is 
A5)
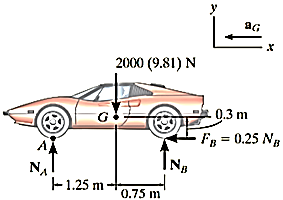
Free body diagram:- As shown in fig. the rear-wheel frictional forces  pushes the car forward and since slipping occurs ,
pushes the car forward and since slipping occurs , the frictional forces acting on the front wheels are zero , since these wheels have negligiable mass. There are three unknowns in the problem
the frictional forces acting on the front wheels are zero , since these wheels have negligiable mass. There are three unknowns in the problem  . Here we will sum moments about the mass center. The car ( point G) accelerates to the left, i.e in the negative x direction
. Here we will sum moments about the mass center. The car ( point G) accelerates to the left, i.e in the negative x direction
Equations and motion.
 -----1
-----1
 -----2
-----2

Solving
αG=1.59m/s2
NA=6.88KN
NB=12.7KN
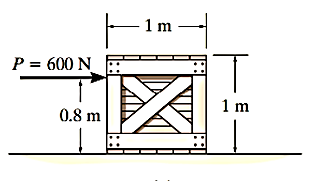
Q6) A uniform 50-kg crate rests on a horizontal surface for which the coefficient of kinetic friction is Determine the acceleration if a force of is applied to the crate as shown in Figure.
A6)
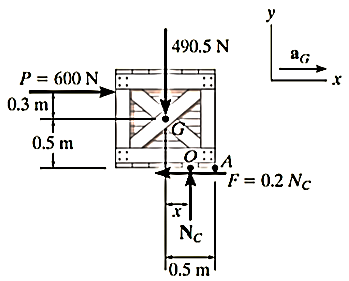
Free – body diagram :- The force P can cause the crate either to slide or to tip over. As shown in fig it is assumed that the crate slides, so that  also the resultant normal force
also the resultant normal force acts as O , a distance x ( where
acts as O , a distance x ( where  from the crates center line . the three unknown are
from the crates center line . the three unknown are 
Equations of motion



Solving
NC=490.5N
x=0.467m
αG=10.0m/s2
since x=0.467 m < 0.5m, indeed the crate slides as originally assumed.
Q7) Explain D’Alembert’s principle for plane motion.
A7) D’Alembert’s principle states that, “if at any given moment to the active forces and the reactions of the constraints acting on a particle or rigid body is added the inertia force, the resultant force system will be in equilibrium and all the equations of statics will apply to it.”
D'Alembert’s principle provides a method of solving problems of dynamics by developing equations of motion in the form of equations of equilibrium.
In simple words, D’Alembert’s principle is just the principle of virtual work with the inertial forces added to the list of forces that do work.
Consider a body in general plane motion as shown in figure below.
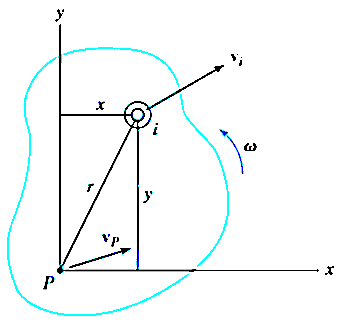
Consider this body is at rest and let  be the resultant external forces acting on a rigid body and
be the resultant external forces acting on a rigid body and  be the virtual displacement of the body is s direction.
be the virtual displacement of the body is s direction.
Then according to principle of virtual work,
This method is used for solving statics problems. In statics problems there are no accelerations.
We can extend this principle of virtual work for solving dynamics problems.
For the system of mass m and resultant acting forces  , according to Newton’s second law of motion,
, according to Newton’s second law of motion,

We can make this dynamics problem look like a statics problem by defining an inertial force given by,

Now, for dynamics problems, principle of virtual work becomes,

As the virtual displacement is same for both the active forces and inertia forces,
This is D’Alembert’s principle used for solving the dynamics problems by using the concept of equilibrium conditions.
The above equation can be written as

Considering the rigid body in general plane motion as shown in figure below:
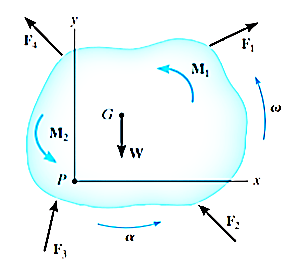
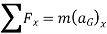
Applying D’Alembert’s principle, three independent scalar equations can be written to describe the general plane motion of a symmetrical rigid body.

Q8) At the instant shown in Figure, the 20-kg slender rod has an angular velocity of  . Determine the angular acceleration and the horizontal and vertical components of reaction of the pin on the rod at this instant.
. Determine the angular acceleration and the horizontal and vertical components of reaction of the pin on the rod at this instant.

A8) Free- body and kinetic diagram: - as shown on the kinetic diagram, point G moves around a circular path and so it has two components of acceleration. It is important that the tangential component  act downwards since it must be in accordance with the rotational sense of
act downwards since it must be in accordance with the rotational sense of  . The three unknowns are
. The three unknowns are 
Equation of motion



Solving

A more direct solution to this problem would be to sum moments about point O to eliminate  and
and  and obtain a direct solution at
and obtain a direct solution at  . Here,
. Here,


Also, since  for a slender rod, we can apply
for a slender rod, we can apply


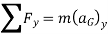
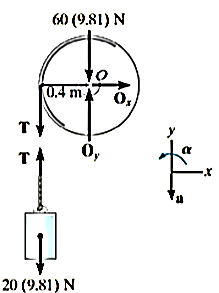
Q9) The drum shown in Figure has a mass of 60 kg and a radius of gyration  . A cord of negligible mass is wrapped around the periphery of the drum and attached to a block having a mass of 20 kg. If the block is released, determine the drum’s angular acceleration.
. A cord of negligible mass is wrapped around the periphery of the drum and attached to a block having a mass of 20 kg. If the block is released, determine the drum’s angular acceleration.
A9)
Free-body diagram :-
Here we will consider the drum and block separately. assuming the block accelerates downward at a, it creates a counterclockwise angular acceleration  of the drum. The moment of inertia of the drum is
of the drum. The moment of inertia of the drum is

There are five unknowns, namely 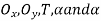
Equations of motion: -applying the translational equations of motion  to the drum is of no consequences to the solution, since these equations involve the unknowns
to the drum is of no consequences to the solution, since these equations involve the unknowns  . Thus, for the drum and block, respectively
. Thus, for the drum and block, respectively


Kinematics: - since, the point of contact A between the cord and drum has a tangential component of acceleration a,

Solving the above equations

Q10) The slender rod shown in Figure has a mass m and length l and is released from rest when  . Determine the horizontal and vertical components of force which the pin at A exerts on the rod at the instant
. Determine the horizontal and vertical components of force which the pin at A exerts on the rod at the instant  .
.

A10)
Free -body diagram :- the free body diagram for the rod in the general position  is shown in fig. for convenience , the force components at A are shown acting in the n and t directions . note that
is shown in fig. for convenience , the force components at A are shown acting in the n and t directions . note that  acts clockwise and so
acts clockwise and so  acts in the +t direction
acts in the +t direction
The moment of inertia of the rod about point A is 
Equations of motion: -moment will be summed about A in order to eliminate 



Kinematics: - for a given angle  there are four unknowns in the above three equations;
there are four unknowns in the above three equations; as shown by eq. 3,
as shown by eq. 3,  is not constant; rather, it depends on the position
is not constant; rather, it depends on the position  of the rod. The necessary fourth equation is obtained using kinematics, where
of the rod. The necessary fourth equation is obtained using kinematics, where  can be related to
can be related to  by the equations
by the equations

note that the positive clockwise direction for this equation agrees with that of eq, 3. this is important since we are seeking a simultaneous solution
in order to solve for  at
at  =90 eliminate
=90 eliminate  from eq. 3 and 4 which yields
from eq. 3 and 4 which yields
since 






