Unit 1
Introduction
Q1. Define mechanism and discuss the classification of mechanism.
A1. A mechanism is defined as the assembly of bodies in such a way that motion in one body causes constrained and predictable motion in other bodies. Or we can say a mechanism is a combination of several bodies to produce a specified motion Mechanisms can be classified in following four types:
Classification of Mechanisms
The mechanisms are of the following types:
1. On the basis of number of links
a) Simple mechanism: A mechanism which has four links.
b) Compound mechanism: A mechanism which has more than four links.
2. On the basis of number of pairs
a) Mechanism having three pairs.
b) Mechanism having 4 pairs.
c) Mechanism having more than 4 pairs.
3. On the basis of motion of particles
a) Planar mechanism: When all the links of the mechanism lie in the same plane.
b) Spatial mechanism: When the links of the mechanism lie in different planes.
Q2. Discuss about the types of kinematic links.
A2. Kinematic link or element is the basic or smallest unit of a mechanism. Generally kinematic links are assumed to be rigid during analysis of kinematic performance of a machine. These links can be classified in following two categories:
Based on number of elements of link | Based on type of structural behavior |
Binary link: Link which is connected to other links at two points.
| Rigid link. A rigid link is the one which does not deform during the transmission of the motion. e.g. connecting rod, crank etc. |
Ternary link: Link which is connected to other links at three points.
| Flexible link. A flexible link can deform partly during transmission of motion without affect the transmission. e.g.-belts, ropes, chains and wires. |
Quaternary link: Link which is connected to other links at four points.
| Fluid link. A link in which transmission of motion takes place through the fluid pressure. e.g.- hydraulic presses, jacks and brakes. |



Q3. Define the kinematic pairs and classify them.
A3. Connection between two links is known as kinematic pair when the relative motion between them is a constrained motion.
Classification of kinematic pair
The kinematic pairs may be classified according to the following considerations:
(i) Based on relative motion between pairing elements:
Name of kinematic pair | Description | Diagram |
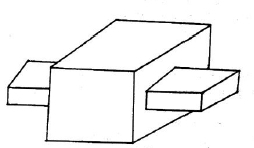
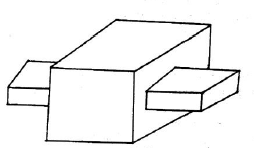
Siding pair | Two elements so connected that one element slides over or inside the other. DOF =1 |
|
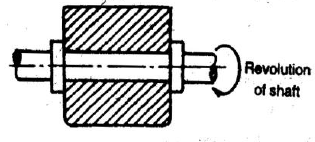
Turning/Revolute pair | Connection between two elements in such a way that one element rotates with respect to other. DOF =1 |
|
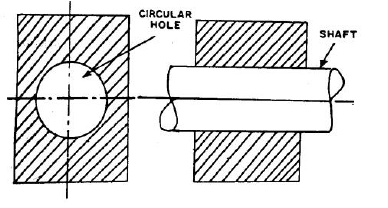
Cylindrical pair | Relative motion between the pairing elements is the combination of turning and sliding, DOF =2 |
|
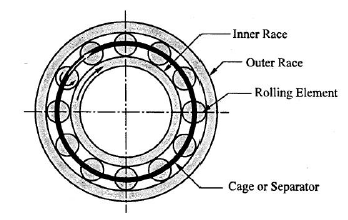
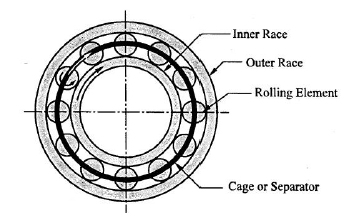
Rolling pair
| Contact between the pair element is rolling. DOF = 1 |
|
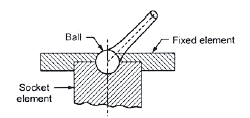
Spherical pair |
When one element in the form of a sphere turns about the other fixed element, it forms a spherical pair. DOF = 3 |
|
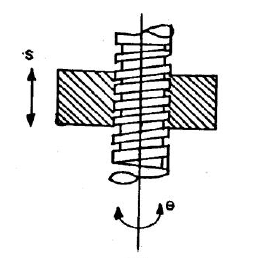
Helical/screw pair | In this kind of pair one element turns about the other element through the screw threads present in it. DOF = 1 |
|
(ii) Based on nature of contact between elements:
Name of kinematic pair | Description | Diagram |
Lower pair | If the joint by which two members are connected has surface contact, the pair is known as lower pair. |
|
Higher pair | If the contact between the pairing elements takes place at a point or along a line, it is known as a higher pair. |
|
(iii) Based on the nature of mechanical constraint:
Name of kinematic pair | Description | Diagram |
Closed pair | Elements of pairs held together mechanically due to their geometry constitute a closed pair. |
|
Unclosed/force closed pair | Elements of pairs held together by the action of external forces constitute unclosed or force closed pair. |
|
Q4. Discuss briefly about the inversions of four bar mechanism.
A4. Kinematic inversion are the different kinds of mechanisms by fixing different links of a mechanism. Kinematic inversions of four-bar chain mechanism are:
1. Double crank mechanism
If smallest link of four bar chain is fixed the resulting mechanism is double crank mechanism. In this mechanism both input and output links make complete revolution.
2. Crank-rocker mechanism
If any link adjacent to smallest link is fixed crank-rocker mechanism is obtained. In this mechanism one link makes complete revolution while one link oscillates.
3. Double rocker mechanism
This inversion of a four-bar chain mechanism is obtained when the link opposite to smallest link is fixed. In this case both input and output links oscillate.
(a) (b) (c)
Figure. Inversions of four-bar chain mechanism (a) double crank (b) crank-rocker mechanism (c) double rocker mechanism.
Some practical applications of four bar chain mechanism
Inversion | Application | Diagram |
Double crank | Locomotive wheel |
|
Crank rocker | Beam engine |
|
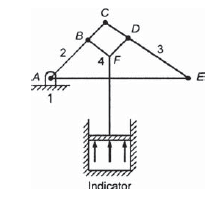
Double rocker | Watt indicator |
|
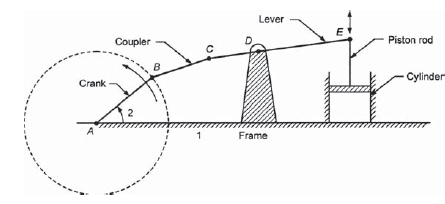
Q5. Discuss briefly about the four-bar mechanism.
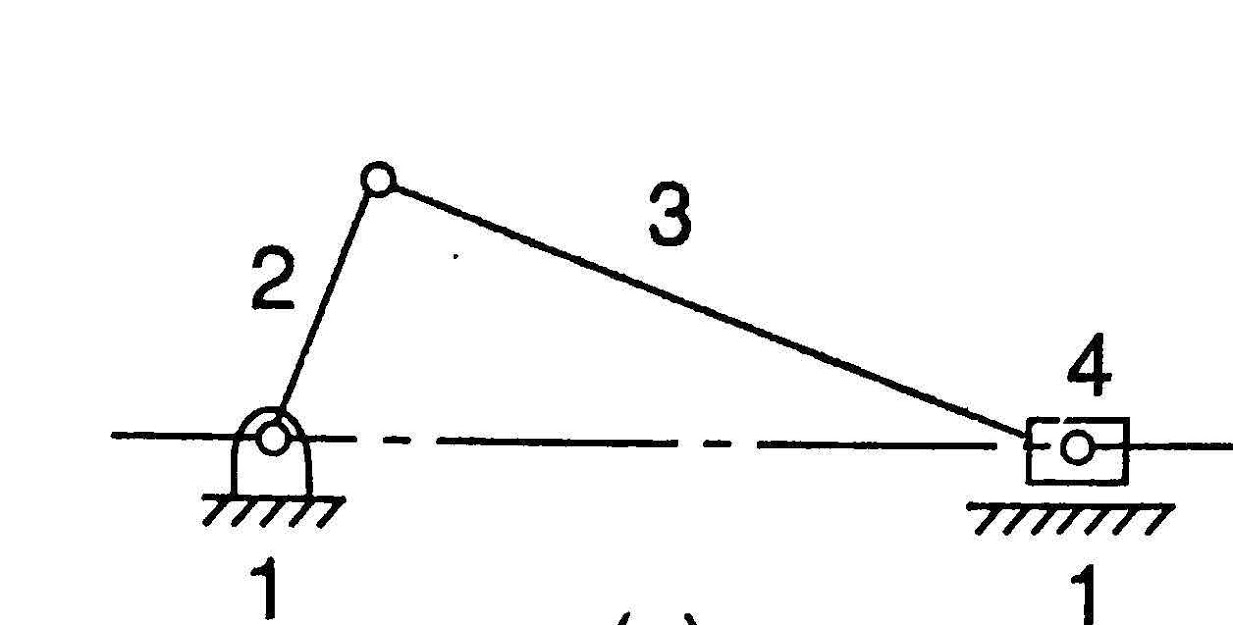
A5. when one of the turning pair of a four-bar chain is replaced by a sliding pair, it becomes single slider-crank chain mechanism. In Figure 3 links 1-2, 2-3 and 3-4 form turning pair while links 4-1 form a sliding pair.
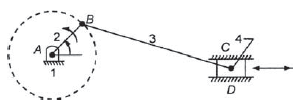
Figure 3. Slider crank mechanism
Inversions of slider crank chain
Slider crank mechanism has following four inversions:
Inversion | Description and Application | Diagram |
First inversion | Link 1 is Fixed. Link 2 and 4 are crank and slider. Application: Reciprocating engine and reciprocating pump etc. |
|
Second inversion | If we fix crank of previous mechanism, link 1 and 3 can complete the revolution and slider slides on link 1. Application: Whitworth quick-return mechanism and Rotary engine. |
|
Third inversion | This inversion is obtained by fixing 3rd link, in this case link 2 rotates while link 4 oscillates. Application: Oscillating cylinder engine and crank and slotted lever mechanism. |
|
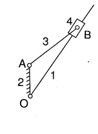
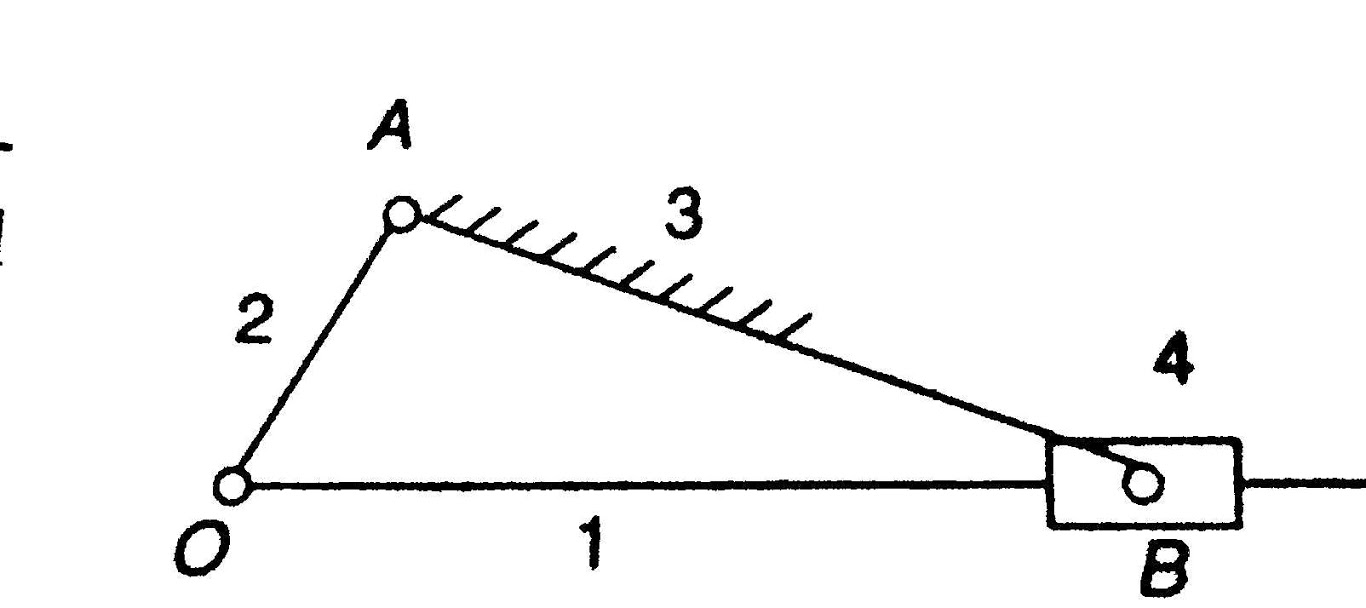
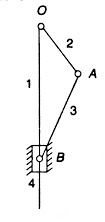
Fourth inversion | If we fix 4th link of slider crank mechanism, link 3 and the end A of link 2 start oscillating about pivot B on link 4 and the end O reciprocates along the axis of fixed link. Application: Hand pump. |
|

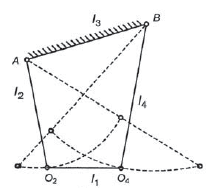
Q6. Calculate the degrees of freedom of the mechanisms shown in Figure.
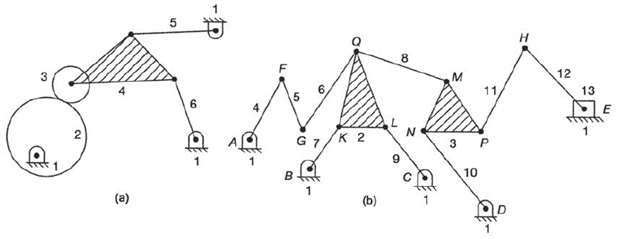
A6.
a) Number of binary links, N = 6
Number of lower pair, p = 7
Number of higher pair, h = 0
Degree of freedom for a mechanism is given by Kutzbach criteria:



Degree of freedom for the given mechanism is 1.
b) Number of links, n = 13
Number of lower pair, p = 16
Number of higher pair, h = 0
Degree of freedom for a mechanism is given by Kutzbach criteria:



Degree of freedom for the given mechanism is 4.
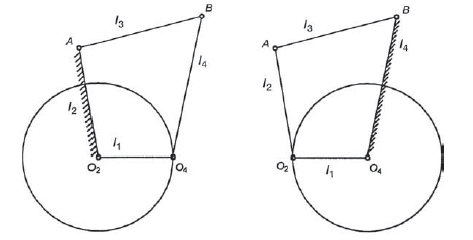
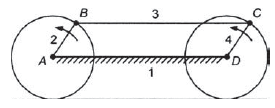
Q7. Identify the nature of each mechanism shown in Figure, using Grashoff’s law.
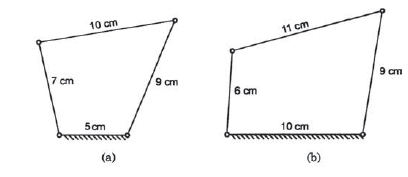
A7.
a) length of longest link, l = 10 cm.
length of smallest link, s = 5 cm
length of other two links, p = 7 cm and q = 9 cm.


Here,

Hence, according to Grasshoff’s law it is class I mechanism, and as the shortest link is fixed hence it is double crank mechanism.
b) length of longest link, l = 11 cm.
length of smallest link, s = 6 cm
length of other two links, p = 9 cm and q = 10 cm.


Here,

Hence, according to Grasshoff’s law it is class I mechanism, and as the shortest link is fixed hence it is double crank mechanism.
Q8. In a Whitworth quick return motion mechanism, as shown in Figure, the distance between the fixed centers is 80 mm and the length of the driving crank is 100 mm. The length of the slotted lever is 180 mm and the length of the connecting rod is 150 mm. Calculate the ratio of the time of cutting to return strokes.
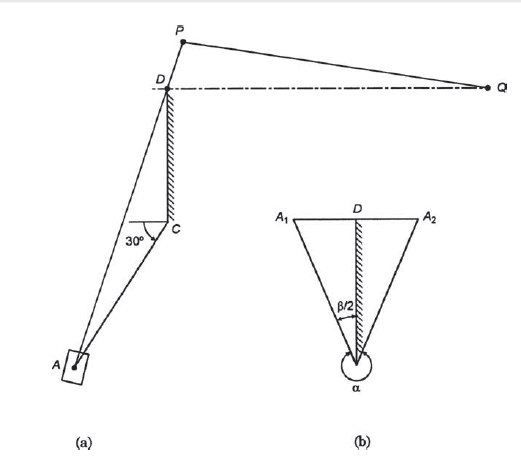
A8. Given: CD = 80 mm, CA = 100 mm, PA = 180 mm, PQ = 150 mm




Q9. Discuss the Grashoff’s law in details.
A9. This law states that a four-bar chain mechanism have at least one revolving pair if the sum of length of smallest and largest links is less than sum of length of other two links.

Where, l = length of largest link
s = length of smallest link
p and q = lengths of other two links.
Mechanism that follow above criteria are also known as class I mechanism. If
(l+s)>(p+q) the mechanism is known as class II mechanism. In which every inversion of four-bar chain result in rocker-rocker mechanism.
In case of class I mechanism we have following three different inversions.
1.Double crank mechanism
If smallest link of four bar chain is fixed the resulting mechanism is double crank mechanism. In this mechanism both input and output links make complete revolution.
2.Crank-rocker mechanism
If any link adjacent to smallest link is fixed crank-rocker mechanism is obtained. In this mechanism one link makes complete revolution while one link oscillates.
3.Double rocker mechanism
This inversion of a four-bar chain mechanism is obtained when the link opposite to smallest link is fixed. In this case both input and output links oscillate.




