Whether machine is D.C. generator or motor the construction basically remains the same.
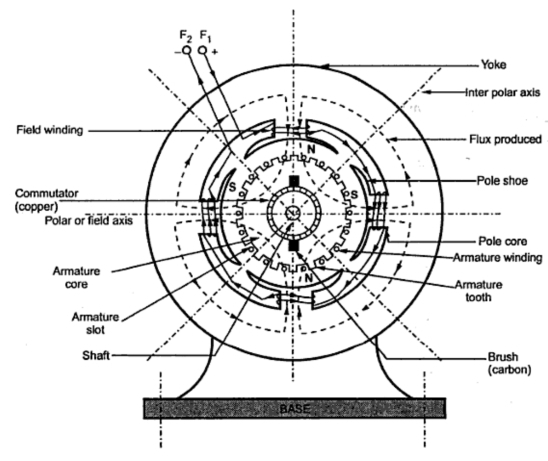
A cross section of typical D.C. machine
1)Yoke a) Functions 1. It serve the purpose of outermost cover of the D.C. machine. So that the insulating materials get protected from harmful atmospheric elements like moisture. Dust and various gases like 2. It provides mechanical support to the poles. 3. It forms a part of the magnetic circuit. It provides a path of low reluctance for magnetic flux. The low reluctance path is important to avoid wastage of power to provide same flux large current and hence the power is necessary if the path has high reluctance to produce the same flux. 4.Choice of material: - It is prepared by using cast iron, silicon steel is used which provides high permeability i.e. low reluctance and gives good mechanical strength.
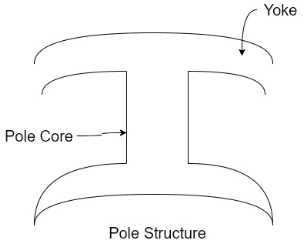
2) Poles
Pole structure Each Pole is divided into two parts namely
Functions of pole core and pole shoe: -
Choice of material: - It is made up of magnetic material like cast iron or cast steel. As it requires a definite shape and size, laminated construction is used. The laminations of required size and shape are stamped together to get a pole which is then bolted to the yoke.
3) Field Winding ( The field winding is wound on the pole core with a definite direction. a)Functions:- To carry current due to which pole core on which the field winding is placed behaves as an electromagnet, producing necessary flux. As it helps in producing the magnetic field i.e. exciting the poles as an electromagnet it is called Field winding or Exciting winding. b) Choice of material:- It has to carry current hence obviously made up of some conducting material. So aluminium or copper is the choice. But field coils are required to take four types of shape and bent about pole core and copper has good pliability i.e. it can be bend easily. So copper is the proper choice .field winding is divided into various coils called field coils. These are connected in series with each other and wound in such direction around pole cores, such that alternate 'N' and 'S' poles are formed. The total number of poles is denoted as P.
4) Armature The armature is further divided into two parts namely
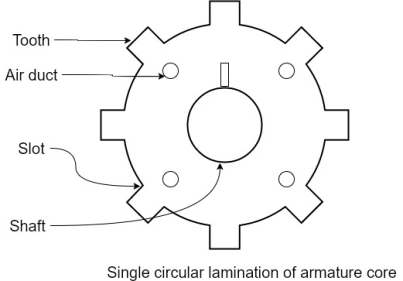
1.Armature core:- Armature core is cylindrical in in shape mounted on the shaft. It consists of slots on its periphery and air ducts to permit the air flow through armature which serves cooling purpose. a) Functions- 1) Armature core provides house for armature winding i.e. armature conductors. 2)To provide the path of low reluctance to the magnetic flux produced by the field winding.
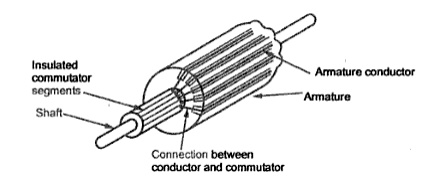
b) Choice of material: - As it has to provide a low reluctance path to the flux, it is made up of magnetic material like cast iron or cast steel. It is made up of laminated construction to keep Eddy current loss as low as possible. A single circular lamination used for the construction of armature core is shown in figure. 3. Armature winding Armature winding is nothing but the interconnection of the armature conductors placed in the slots provided on the armature core periphery. When the armature is rotated in case of generator magnetic flux gets cut by armature conductors and e.m.f gets induced in them. a) Functions 1) curvatures of e.m.f takes place in the armature winding in case of generators. 2) To carry the current supplied in case of D.C. motors. 3) To do the useful work in the external circuit. b) Choice of Material: - As armature winding carries entire current which depends on external load, it has to be made up of conducting material which is copper. 5.Commutator The basic nature of e.m.f in the armature conductors is alternating. This needs verification in case of D.C. generator, which is possible by a device called commutator. a)Functions: 1)To facilitate the collection of current from the armature conductors. 2) To convert internally developed alternating e.m.f to unidirectional (D.C.) e.m.f. 3) To produce unidirectional torque in case of motors
b) Choice of Material:- As it collects current from armature, it is also made up of copper segments.
It is cylindrical in shape and is made up of wedge-shaped segments of hand drawn high conductivity copper .the segments are insulated from each other by thin layer of Mica. Each commutator segment is connected to the armature conductor by means of copper lug or strip. This construction is shown in figure above. 6. Brushes and Brush Gear Brushes are stationary and resting on the surface of the commutator. a) Function- to collect current from computer and make it available to stationary external circuit. b) Choice of Material: - Brushes are normally made up of soft material like carbon. To avoid wear and tear of commentator the brushes are made up of soft material like carbon. 7) Bearings Ball bearings are usually used as they are more reliable. For heavy duty machines roller bearing are preferred. |


V=200V Are the given values For a motor , V= 220=
This is the induced EMF called a back EMF in a motor |




V=250 P=6 Z=220 A=2 As two circuit armature
N=908 r.p.m For a DC shunt motor
250= Back emf
|







|
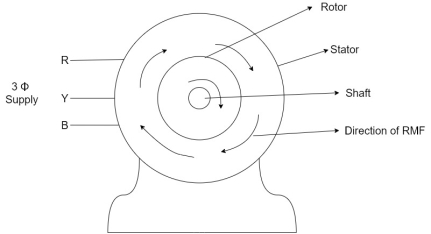
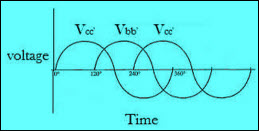
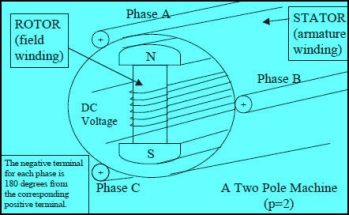
Principle The principle of operation of synchronous generator is electromagnetic induction. If there exists a relative motion between the flux and conductors, then an emf is induced in the conductors. To understand the synchronous generator working principle, let us consider two opposite magnetic poles in between them a rectangular coil or turn is placed as shown in the below figure. Now, if we consider a practical synchronous generator, then field magnets rotate between the stationary armature conductors. The synchronous generator rotor and shaft or turbine blades are mechanically coupled to each other and rotate at synchronous speed. Thus, the magnetic flux cutting produces an induced emf which causes the current flow in armature conductors. Thus, for each winding the current flows in one direction for the first half cycle and current flows in the other direction for the second half cycle with a time lag of 120 degrees (as they displaced by 120 degrees). Hence, the output power of synchronous generator can be shown as below figure.
Construction: In general, synchronous generator consists of two parts rotor and stator. The rotor part consists of field poles and stator part consists of armature conductors. The rotation of field poles in the presence of armature conductors induces an alternating voltage which results in electrical power generation.
Construction of Synchronous Generator The speed of field poles is synchronous speed and is given by
Where, ‘f’ indicates alternating current frequency and ‘P’ indicates number of poles. |
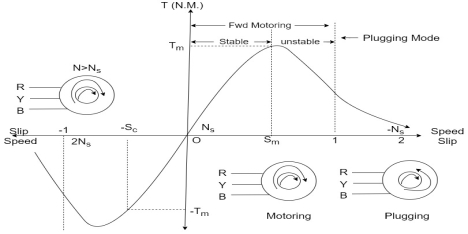
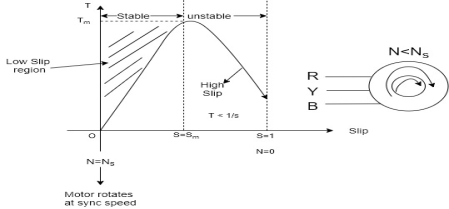
Torque slip region for stable regimen
S= small
Unstable:-
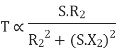
Various Torques ;
Total Torque
|















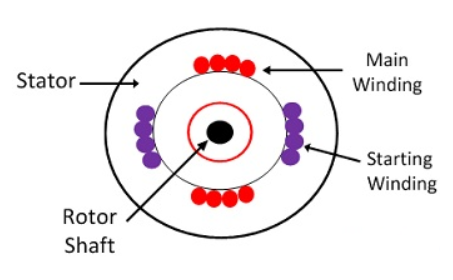
A Single- Phase Induction Motor consists of a single- phase winding which is mounted on the stator of the motor and a cage winding placed on the rotor. A pulsating magnetic field is produced, when the stator winding of the single-phase induction motor shown below is energised by a single- phase supply.
The word Pulsating means that the field builds up in one direction falls to zero and then builds up in the opposite direction. Under these conditions, the rotor of an induction motor does not rotate. Hence, a single -phase induction motor is not self-starting. It requires some special starting means. If the 1 phase stator winding is excited and the rotor of the motor is rotated by an auxiliary means and the starting device is then removed, the motor continues to rotate in the direction in which it is started. The performance of the single- phase induction motor is analysed by the two theories. One is known as the Double Revolving Field Theory, and the other is Cross Field Theory. The double revolving field theory of single- phase induction motor states that a pulsating magnetic field is resolved into two rotating magnetic fields. They are equal in magnitude but opposite in directions. The induction motor responds to each of the magnetic fields separately. The net torque in the motor is equal to the sum of the torque due to each of the two magnetic fields. The equation for an alternating magnetic field is given as
Where βmax is the maximum value of the sinusoidally distributed air gap flux density produced by a properly distributed stator winding carrying an alternating current of the frequency ω, and α is the space displacement angle measured from the axis of the stator winding. So, the equation (1) can be written as
The first term of the right-hand side of the equation (2) represents the revolving field moving in the positive α direction. It is known as a Forward Rotating field. Similarly, the second term shows the revolving field moving in the negative α direction and is known as the Backward Rotating field. The direction in which the single- phase motor is started initially is known as the positive direction. Both the revolving field rotates at the synchronous speed. ωs = 2πf in the opposite direction. Thus, the pulsating magnetic field is resolved into two rotating magnetic fields. Both are equal in magnitude and opposite in direction but at the same frequency. At the standstill condition, the induced voltages are equal and opposite as a result; the two torques are also equal and opposite. Thus, the net torque is zero and, therefore, a single- phase induction motor has no starting torque. |


 When load is suddenly put on the motor. Motor tries to slow down. So speed of the motor reduces due to which back EMF also decreases. So the net voltage across the armature
When load is suddenly put on the motor. Motor tries to slow down. So speed of the motor reduces due to which back EMF also decreases. So the net voltage across the armature Increases and motor draws more armature current.Due to the increased armature current force experienced by the conductors and hence the torque on the armature increases. The increase in the torque is just sufficient to satisfy increase load demand.When load on the motor is decreased the speed of the motor tries to increase. Hence back EMF increases. This
Increases and motor draws more armature current.Due to the increased armature current force experienced by the conductors and hence the torque on the armature increases. The increase in the torque is just sufficient to satisfy increase load demand.When load on the motor is decreased the speed of the motor tries to increase. Hence back EMF increases. This  to reduce which eventually reduces the current drawn by the armature. The motor speed stops increasing when the armature current is just enough to produce the less torque required by the new load.So back EMF regulate the flow of armature current and it automatically alters the armature current to meet the load requirement. This is the practical significance of the back EMF. Q10) Write the Power equation of a DC motor.A10)
to reduce which eventually reduces the current drawn by the armature. The motor speed stops increasing when the armature current is just enough to produce the less torque required by the new load.So back EMF regulate the flow of armature current and it automatically alters the armature current to meet the load requirement. This is the practical significance of the back EMF. Q10) Write the Power equation of a DC motor.A10) The voltage equation of a DC motor is given by V=
Multiplying both sides of the above equation by V This equation is called as power equation of a DC motor V
So difference between V So This is denoted as |














