Unit 5
Intelligent Sensors
Q1. What is an intelligent sensor?
Sol:
Intelligent sensor, also called “smart sensor”, is a tool for human access to information, sensors are an important part of modern information technology.
In the traditional sense, the output of the sensor is mostly an analogue signal. It does not have the function of signal processing and networking. It needs to connect to a specific measuring instrument to complete the signal processing and transmission function.
Q2. Explain the structure of smart sensors?
Sol:
The general structure of smart sensors and their components
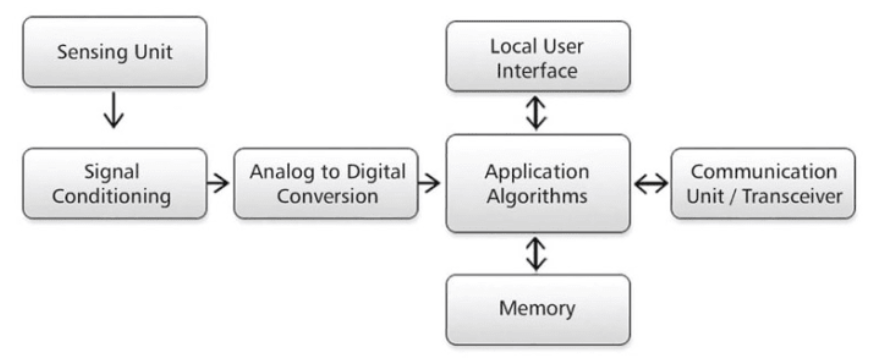
Figure. Smart Sensors
The features of smart sensors include:
The application algorithms are performed by a built-in microprocessor unit (MPU). These can run filtering, compensation, and any other process-specific signal conditioning tasks.
Sensor Excitation: Many times it is required to alter the sensor excitation over the operating range of a sensor. An example of this is a silicon Wheatstone bridge, where the drive voltage is increased with increasing temperature. This is done to compensate for the reduction in sensitivity of the piezoresistors with an increase in temperature. A drive stage with temperature dependence can be used which is control by a microprocessor. This will also reduce the calibration time.
Analogue Input: Multiplexing of inputs can be done to avoid duplication of the circuit. In multiplexing inputs of the same type and range are switched to a common front end. The outputs of sensors are normalized before they are switched and a variable gain stage is included after the multiplexer. This allows the sensitivity variations between the different sensors to be accounted for by a common front-end.
In addition to this, an offset adjustment is also included in the common front end. The variable gain stage also offers an additional advantage where the input signals are to be sampled by an analogue to digital converter (ADC) with fixed reference points. Under such a situation, the gain can be increased at the lower end to increase the sensitivity.
Data Conversion: In the case of smart sensors most of the signal processing is done in digital form. This is possible only when we have an ADC along with an anti-aliasing filter. This is because most of the sensor output is in an analogue form. Choice of ADC depends on the resolution, bandwidth, and complexity of the anti-aliasing filter.
Digital data bus interface: The controller embedded in the smart sensor supports communications by a digital data bus. The advantages of this are: Wiring is reduced considerably Automatic calibration at production can be simplified. Monitoring and diagnostic functions: In many applications self-test is required. This self-test includes connectivity checking and long-term offset correction.
Control processor: To provide greater flexibility and reduced complexity, a control processor can be used. Control processor can do digital filtering. Another important point is software development. A processor must allow writing codes in higher language as it reduces the development time.
Q3. What is self -calibration?
Sol:
Self-calibration means adjusting some parameters of the sensor during fabrication, this can be either gain or offset or both. Self-calibration is to adjust the deviation of the output of the sensor from the desired value when the input is at minimum or it can be an initial adjustment of gain.
Q4. What is self-testing?
Sol:
An oscillation-based built-in self-test (BIST) method is presented for functional testing of mixed-signal devices. An integral component of this method of on-chip testing involves transforming an oscillating analog signal into a digital clock-like signal.
Q5. What is self communicating?
Sol:
Another important feature of the smart sensor is communication, which is a bidirectional – sensor to the main microprocessor or microcontroller and vice versa.
Smart sensors will have mechanisms for synchronization communication between sensors and microcontrollers and support different data rates. Industrial Smart sensors come with a plug and play mechanism, like a CAN bus mechanism where they can be connected to the network and removed as easily as possible also a mechanism to identify their own identity in the network.
Q6. What is the application of robotic control?
Sol:
An integrated system based on a robotic manipulator is made where the robot can perform operations in real-time under dynamic conditions. Online planning is made to enable a robotic end effector to perform pick-and-place tasks within a given workspace. Such online planning consists of moving the robot to a start (pick) position, pick a given object, transport it to a given goal (place) position, and release it.
The proposed system consists of three independent modules:
(i) machine vision,
(ii) path planning and
(iii) robot control linked in parallel to form an efficient integrated system with wide modularity.
All modules work in real-time, and communications are maintained across modules. The machine vision module performs obstacle detection, where dynamically moving obstacles are tracked in the robot workspace.
The decision-making process is derived from the path planning module, where the search for optimal, feasible paths for pick-and-place operations is performed based on input obtained from the machine vision to update the current geometric representation of the environment. These two modules communicate by TCP/IP sockets, where the machine vision software acts as a server, and the path planning module acts as a client.

Figure2. Three modules running simultaneously in parallel: (i) machine vision (smart sensing), (ii) path planning (reasoning, decision making), and (iii) robot control (movement coordination)
Q7. What is the use of engine control?
Sol:
Sensors play an important role in automotive. They enable greater degrees of vehicle automation and futuristic designs. For example, at manufacturing units, sensorised robotic arms are used for painting car bodies and measuring the thickness of the coatings being applied. Manufacturers can simply monitor the thickness of the paint being sprayed on instruments, airbag claddings, and various internal parts of the vehicles using sensors.
Sensors monitor vehicle engines, fuel consumption, and emissions, along with aiding and protecting drivers and passengers. These allow car manufacturers to launch cars that are safer, more fuel-efficient, and comfortable to drive.
The ECU simplifies the communication between various components and devices because long wires for each function are not required. It is installed in the vehicle and connected to the nearest vehicle bus, including controller area network (CAN), local interconnect network (LIN), FlexRay, and BroadR-Reach, among others. A CAN bus standard is designed to allow MCUs, sensors, and other devices to communicate with each other without a host computer.
Q8. Explain the advantages of intelligent sensors?
Sol:
Intelligent sensors can carry out some intrinsically intelligent functions, such as the ability to self-test, self-validate, self-adapt, and self-identify.
They understand process requirements, manage a wide range of conditions, and can detect conditions to support real-time decision making.
Q9. What are the applications of intelligent sensors?
Sol:
Q10. What is the difference between a sensor and a smart sensor?
Sol:
A sensor is a device that would create an electrical signal which is related to the quantity that is measured by it. So this device would measure the physical quantity and the measurement will be displayed by using an instrument. A smart sensor or an intelligent sensor is a device that has integrated electronics, and they can perform certain functions like, logic functions, two-way communications, and are capable to make decisions.
Unit 5
Intelligent Sensors
Q1. What is an intelligent sensor?
Sol:
Intelligent sensor, also called “smart sensor”, is a tool for human access to information, sensors are an important part of modern information technology.
In the traditional sense, the output of the sensor is mostly an analogue signal. It does not have the function of signal processing and networking. It needs to connect to a specific measuring instrument to complete the signal processing and transmission function.
Q2. Explain the structure of smart sensors?
Sol:
The general structure of smart sensors and their components
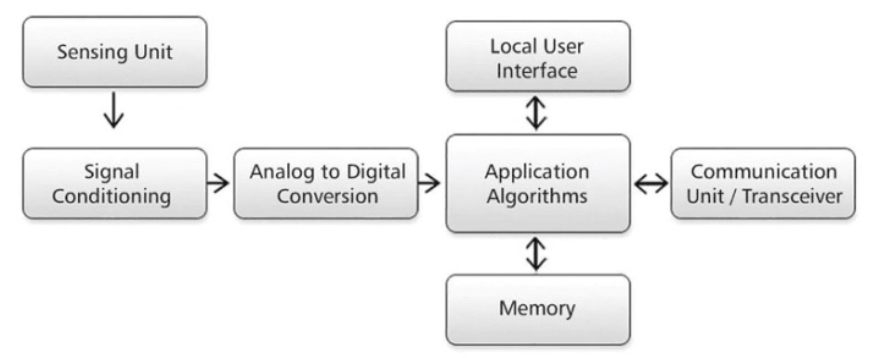
Figure. Smart Sensors
The features of smart sensors include:
The application algorithms are performed by a built-in microprocessor unit (MPU). These can run filtering, compensation, and any other process-specific signal conditioning tasks.
Sensor Excitation: Many times it is required to alter the sensor excitation over the operating range of a sensor. An example of this is a silicon Wheatstone bridge, where the drive voltage is increased with increasing temperature. This is done to compensate for the reduction in sensitivity of the piezoresistors with an increase in temperature. A drive stage with temperature dependence can be used which is control by a microprocessor. This will also reduce the calibration time.
Analogue Input: Multiplexing of inputs can be done to avoid duplication of the circuit. In multiplexing inputs of the same type and range are switched to a common front end. The outputs of sensors are normalized before they are switched and a variable gain stage is included after the multiplexer. This allows the sensitivity variations between the different sensors to be accounted for by a common front-end.
In addition to this, an offset adjustment is also included in the common front end. The variable gain stage also offers an additional advantage where the input signals are to be sampled by an analogue to digital converter (ADC) with fixed reference points. Under such a situation, the gain can be increased at the lower end to increase the sensitivity.
Data Conversion: In the case of smart sensors most of the signal processing is done in digital form. This is possible only when we have an ADC along with an anti-aliasing filter. This is because most of the sensor output is in an analogue form. Choice of ADC depends on the resolution, bandwidth, and complexity of the anti-aliasing filter.
Digital data bus interface: The controller embedded in the smart sensor supports communications by a digital data bus. The advantages of this are: Wiring is reduced considerably Automatic calibration at production can be simplified. Monitoring and diagnostic functions: In many applications self-test is required. This self-test includes connectivity checking and long-term offset correction.
Control processor: To provide greater flexibility and reduced complexity, a control processor can be used. Control processor can do digital filtering. Another important point is software development. A processor must allow writing codes in higher language as it reduces the development time.
Q3. What is self -calibration?
Sol:
Self-calibration means adjusting some parameters of the sensor during fabrication, this can be either gain or offset or both. Self-calibration is to adjust the deviation of the output of the sensor from the desired value when the input is at minimum or it can be an initial adjustment of gain.
Q4. What is self-testing?
Sol:
An oscillation-based built-in self-test (BIST) method is presented for functional testing of mixed-signal devices. An integral component of this method of on-chip testing involves transforming an oscillating analog signal into a digital clock-like signal.
Q5. What is self communicating?
Sol:
Another important feature of the smart sensor is communication, which is a bidirectional – sensor to the main microprocessor or microcontroller and vice versa.
Smart sensors will have mechanisms for synchronization communication between sensors and microcontrollers and support different data rates. Industrial Smart sensors come with a plug and play mechanism, like a CAN bus mechanism where they can be connected to the network and removed as easily as possible also a mechanism to identify their own identity in the network.
Q6. What is the application of robotic control?
Sol:
An integrated system based on a robotic manipulator is made where the robot can perform operations in real-time under dynamic conditions. Online planning is made to enable a robotic end effector to perform pick-and-place tasks within a given workspace. Such online planning consists of moving the robot to a start (pick) position, pick a given object, transport it to a given goal (place) position, and release it.
The proposed system consists of three independent modules:
(i) machine vision,
(ii) path planning and
(iii) robot control linked in parallel to form an efficient integrated system with wide modularity.
All modules work in real-time, and communications are maintained across modules. The machine vision module performs obstacle detection, where dynamically moving obstacles are tracked in the robot workspace.
The decision-making process is derived from the path planning module, where the search for optimal, feasible paths for pick-and-place operations is performed based on input obtained from the machine vision to update the current geometric representation of the environment. These two modules communicate by TCP/IP sockets, where the machine vision software acts as a server, and the path planning module acts as a client.
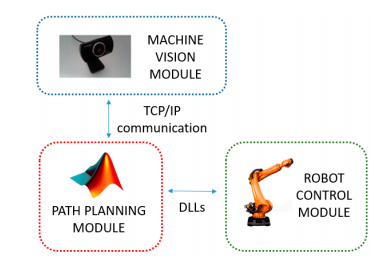
Figure2. Three modules running simultaneously in parallel: (i) machine vision (smart sensing), (ii) path planning (reasoning, decision making), and (iii) robot control (movement coordination)
Q7. What is the use of engine control?
Sol:
Sensors play an important role in automotive. They enable greater degrees of vehicle automation and futuristic designs. For example, at manufacturing units, sensorised robotic arms are used for painting car bodies and measuring the thickness of the coatings being applied. Manufacturers can simply monitor the thickness of the paint being sprayed on instruments, airbag claddings, and various internal parts of the vehicles using sensors.
Sensors monitor vehicle engines, fuel consumption, and emissions, along with aiding and protecting drivers and passengers. These allow car manufacturers to launch cars that are safer, more fuel-efficient, and comfortable to drive.
The ECU simplifies the communication between various components and devices because long wires for each function are not required. It is installed in the vehicle and connected to the nearest vehicle bus, including controller area network (CAN), local interconnect network (LIN), FlexRay, and BroadR-Reach, among others. A CAN bus standard is designed to allow MCUs, sensors, and other devices to communicate with each other without a host computer.
Q8. Explain the advantages of intelligent sensors?
Sol:
Intelligent sensors can carry out some intrinsically intelligent functions, such as the ability to self-test, self-validate, self-adapt, and self-identify.
They understand process requirements, manage a wide range of conditions, and can detect conditions to support real-time decision making.
Q9. What are the applications of intelligent sensors?
Sol:
Q10. What is the difference between a sensor and a smart sensor?
Sol:
A sensor is a device that would create an electrical signal which is related to the quantity that is measured by it. So this device would measure the physical quantity and the measurement will be displayed by using an instrument. A smart sensor or an intelligent sensor is a device that has integrated electronics, and they can perform certain functions like, logic functions, two-way communications, and are capable to make decisions.




