Unit 4
Signal system
- Find the z transform of discrete time signal?
Consider applying complex exponential input x(n) = z n to an LTI system with impulse response h(n). The system output is given by
y(n) = h(n) * x(n)
=  x(n-k) =
x(n-k) =  z(n-k)
z(n-k)
= z n  z-k
z-k
= z n H(z).
H(z) is known as the transfer function of LTI system.
We know that a signal for which the system output is a constant times, the input is referred to as an eigen function of the system and the amplitude factor is referred to as the system’s eigen value. Hence, we identify zn as an eigen function of the LTI system and H(z) is referred to as the Bilateral z-transform or simply z-transform of the impulse response h(n).
The transform relationship between x(n) and X(z) is
x(n) -> X(Z)
2. Explain ROC?
Region of Convergence of z-Transform
The open region where X(z) converges is referred to as the region of convergence (ROC) of X(z).
The ROC may mean the region where X(z) converges. It should be noted that both the algebraic expression and the ROC of X(z) are required to specify x(n) uniquely.
3. Explain the different types of ROC?
For different types of x(n), the ROC of X(z) has different types.
(1) If x(n) is of finite duration, then the ROC of X(z) is the entire plane, i.e., zC. Especially, z=0 needs to be excluded from the ROC if x(n) has nonzero values for n>0.
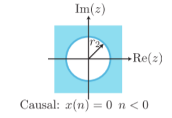
(2) If x(n) is right-sided, then the ROC of X(z) is the exterior of a circle centered about the origin, i.e., |z|>r0 .
(3) If x(n) is left-sided, then the ROC of X(z) is the interior of a circle centered about the origin, i.e., |z|0. (4) If x(n) is two-sided, then the ROC of X(z) is a ring centered about the origin, i.e., r1<|z|
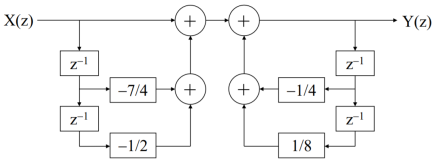
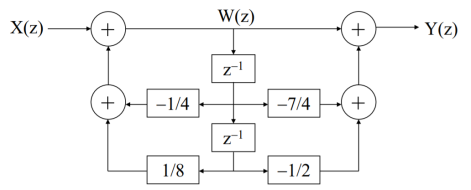
4.A causal linear time-invariant discrete-time system is characterized by
H(z)= 1- (7/4 ) z-1 –(1/2) z -2 / 1+(1/4) z-1 – (1/8) z -2
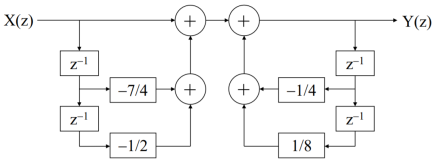
We obtain Y(z)=(1/4)z1Y(z)+(1/8)z2Y(z)+ X(z)(7/4)z1X(z)(1/2)z2X(z).
Y(z) = 1-7/4 z-1 – ½ z-2 / 1+1/4 z-1 -1/8 z-2
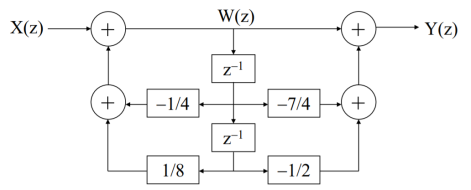
Y(z) = [ 1-(7/4) z-1 – (1/2) z-2 ] W(z)
W(z) = 1/ 1+1/4 z-1 -1/8 z-2 X(z)
W(z) = -(1/4) z-1 W(z) +(1/8) z-2 W(z) +X(z)
Y(z) = W(z) – (7/4) z-1 W(z) –(1/2) z-2 W(z)
5. What are the applications of z transform?
-Uses to analysis of digital filters.
-Used to simulate the continuous systems.
-Analyze the linear discrete system.
-Used to finding frequency response.
-Analysis of discrete signal.
-Helps in system design and analysis and also checks the systems stability.
-For automatic controls in telecommunication.
-Enhance the electrical and mechanical energy to provide dynamic nature of the system.
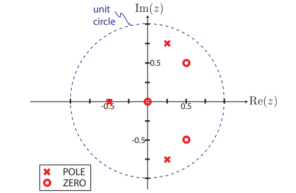
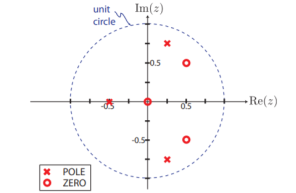
6. Find the poles and zeros
X(z) = z 2 z 2 – 2z +1 / 16 z3 +6z +5
(z-0) ( z – (1/2 +j/2)) (z – (1/2 -j/2))/ (z-(1/4 +j3/4) )(z-(1/4 – j ¾))(z-(-1/2))
Poles z=1/4  j ¾ , -1/2
j ¾ , -1/2
Zeros : z =0, ½  j ½
j ½
7. Find the ROC of Infinite duration signals?



8. What are the advantages of ROC?
- The ROC curve is a plot of sensitivity vs. False positive rate for a range of diagnostic test results.
- It graphically represents the compromise between sensitivity and specificity in tests which produce results on a numerical scale.
- It therefore allows a graphical representation of a test's accuracy, and allows for a comparison of such tests.
- It may be used to generate decision thresholds or “cut off” values, and it can be used to generate confidence intervals for sensitivity and specificity and likelihood ratios.
9. What are the advantages of z transform?
- Z transform is used for the digital signal
- Both Discrete-time signals and linear time-invariant (LTI) systems can be completely characterized using Z transform
- The stability of the linear time-invariant (LTI) system can be determined using the Z transform
- By calculating Z transform of the given signal, DFT and FT can be determined
- The entire family of digital filters can be obtained from one proto-type design using Z transform
- The solution of differential equations can be simplified or obtained by using Z transform theorem
- Mathematical calculations are reduced using the Z transform.
10. What is the difference between Laplace and z transform?
The Laplace and Fourier transforms are continuous (integral) transforms of continuous functions.
The Laplace transform maps a function f(t)to a function F(s) of the complex variable s, where s=σ+jω.
Since the derivative f˙(t)=df(t)/dt maps to sF(s)the Laplace transform of a linear differential equation is an algebraic equation.
Thus, the Laplace transform is useful for, among other things, solving linear differential equations.
If we set the real part of the complex variable s to zero, σ=0, the result is the Fourier transform F(jω) which is essential.
Unit 4
Signal system
- Find the z transform of discrete time signal?
Consider applying complex exponential input x(n) = z n to an LTI system with impulse response h(n). The system output is given by
y(n) = h(n) * x(n)
=  x(n-k) =
x(n-k) =  z(n-k)
z(n-k)
= z n  z-k
z-k
= z n H(z).
H(z) is known as the transfer function of LTI system.
We know that a signal for which the system output is a constant times, the input is referred to as an eigen function of the system and the amplitude factor is referred to as the system’s eigen value. Hence, we identify zn as an eigen function of the LTI system and H(z) is referred to as the Bilateral z-transform or simply z-transform of the impulse response h(n).
The transform relationship between x(n) and X(z) is
x(n) -> X(Z)
2. Explain ROC?
Region of Convergence of z-Transform
The open region where X(z) converges is referred to as the region of convergence (ROC) of X(z).
The ROC may mean the region where X(z) converges. It should be noted that both the algebraic expression and the ROC of X(z) are required to specify x(n) uniquely.
3. Explain the different types of ROC?
For different types of x(n), the ROC of X(z) has different types.
(1) If x(n) is of finite duration, then the ROC of X(z) is the entire plane, i.e., zC. Especially, z=0 needs to be excluded from the ROC if x(n) has nonzero values for n>0.
(2) If x(n) is right-sided, then the ROC of X(z) is the exterior of a circle centered about the origin, i.e., |z|>r0 .
(3) If x(n) is left-sided, then the ROC of X(z) is the interior of a circle centered about the origin, i.e., |z|0. (4) If x(n) is two-sided, then the ROC of X(z) is a ring centered about the origin, i.e., r1<|z|
4.A causal linear time-invariant discrete-time system is characterized by
H(z)= 1- (7/4 ) z-1 –(1/2) z -2 / 1+(1/4) z-1 – (1/8) z -2
We obtain Y(z)=(1/4)z1Y(z)+(1/8)z2Y(z)+ X(z)(7/4)z1X(z)(1/2)z2X(z).
Y(z) = 1-7/4 z-1 – ½ z-2 / 1+1/4 z-1 -1/8 z-2
Y(z) = [ 1-(7/4) z-1 – (1/2) z-2 ] W(z)
W(z) = 1/ 1+1/4 z-1 -1/8 z-2 X(z)
W(z) = -(1/4) z-1 W(z) +(1/8) z-2 W(z) +X(z)
Y(z) = W(z) – (7/4) z-1 W(z) –(1/2) z-2 W(z)
5. What are the applications of z transform?
-Uses to analysis of digital filters.
-Used to simulate the continuous systems.
-Analyze the linear discrete system.
-Used to finding frequency response.
-Analysis of discrete signal.
-Helps in system design and analysis and also checks the systems stability.
-For automatic controls in telecommunication.
-Enhance the electrical and mechanical energy to provide dynamic nature of the system.
6. Find the poles and zeros
X(z) = z 2 z 2 – 2z +1 / 16 z3 +6z +5
(z-0) ( z – (1/2 +j/2)) (z – (1/2 -j/2))/ (z-(1/4 +j3/4) )(z-(1/4 – j ¾))(z-(-1/2))
Poles z=1/4  j ¾ , -1/2
j ¾ , -1/2
Zeros : z =0, ½  j ½
j ½
7. Find the ROC of Infinite duration signals?


8. What are the advantages of ROC?
- The ROC curve is a plot of sensitivity vs. False positive rate for a range of diagnostic test results.
- It graphically represents the compromise between sensitivity and specificity in tests which produce results on a numerical scale.
- It therefore allows a graphical representation of a test's accuracy, and allows for a comparison of such tests.
- It may be used to generate decision thresholds or “cut off” values, and it can be used to generate confidence intervals for sensitivity and specificity and likelihood ratios.
9. What are the advantages of z transform?
- Z transform is used for the digital signal
- Both Discrete-time signals and linear time-invariant (LTI) systems can be completely characterized using Z transform
- The stability of the linear time-invariant (LTI) system can be determined using the Z transform
- By calculating Z transform of the given signal, DFT and FT can be determined
- The entire family of digital filters can be obtained from one proto-type design using Z transform
- The solution of differential equations can be simplified or obtained by using Z transform theorem
- Mathematical calculations are reduced using the Z transform.
10. What is the difference between Laplace and z transform?
The Laplace and Fourier transforms are continuous (integral) transforms of continuous functions.
The Laplace transform maps a function f(t)to a function F(s) of the complex variable s, where s=σ+jω.
Since the derivative f˙(t)=df(t)/dt maps to sF(s)the Laplace transform of a linear differential equation is an algebraic equation.
Thus, the Laplace transform is useful for, among other things, solving linear differential equations.
If we set the real part of the complex variable s to zero, σ=0, the result is the Fourier transform F(jω) which is essential.




