Q1) A cinema hall has a volume of 7500m3. It is required to have reverberation time of 1.5 sec? What should be the absorption in the hall?
A1)
Given
Volume = 7500m3
Reverberation time T = 1.5 sec
We know that reverberation time is given by
T =0.165 V/
T =0.165 V/ A
Where V-Volume of hall in m3
A - Absorption coefficient
1.5 =0.165 x 7500/A
A= 825 O.W.S
Q2) A volume of room is 1200m3. The wall area of room is 200 m3. The floor wall area of room is 120m3 and ceiling area is 120m3 and. The average the sound absorption coefficient (i) for walls is 0.03 (ii) for ceiling is 0.80 (iii) for the floor is 0.06. Calculate the average absorption coefficient and reverberation time?
A2)
Given
Volume = 1200m3
The average absorption coefficient is
A = a1s1 +a2s2 +a3s3 / s1 +s2 +s3
A = (0.03 x 200 + 0.80 x120 +0.06 x 120) / (200+120+120)
A = 0.2389 =0.24 (approx.)
Now the total absorption of room = As =0.24 x460 =110.40 O.W.S.
Reverberation Time T =0.165 V/AS = 0.165 x 1200/ 109.2
= 1.80 seconds
Q3) For an empty hall of size 20x15x10 m3 the reverberation time is 3.5 sec. calculate the average absorption coefficient. What area of the wall should be covered by the curtain so as to reduce reverberation time 2.5 sec. Given the absorption coefficient of curtain clothe is 0.5
A3)
A =as = (0.165) x (20x15x10)/ 3.5 = 138 m2
When wall are covered with the curtain clothe
2.5 = (0.165) x (20x15x10)/ 0.5x s
Therefore area of the wall covered by the curtain
s = 483- (2.5 x 138)/2.5 x 0.5
110.4 m2
Q4)What is meant by ultrasonic?
A4)
Ultrasonics are the sound waves of frequency above audible range (i.e) above 20,000 Hz (or) 20 KHZ. This sound wave cannot be heard by human ear, but it has many useful applications in engineering and medical fields.
Q5)Are the ultrasonic waves electromagnetic waves? Give proper reasons.
A5)
Ultrasonic waves are not electromagnetic waves because they are sound wave which does not consist of electric and magnetic vectors as in electromagnetic waves.
Q6) Why are ultrasonic waves not audible to humans?
A6)
The audible range of frequencies for human beings is between 20HZ to 20,000HZ. Since the frequency of ultrasonic wave is having above 20,000HZ, it is not audible to humans.
Q7) Why not ultrasonic be produced by passing high frequency alternating current through a loud speaker?
A7)
Ultrasonic cannot be produced by passing high frequency alternating current through loud speaker due to the following reasons.
Loud speaker cannot vibrate at such high frequency.
Inductance of the speaker coil becomes so high and practically no current flows through it.
Q8) Mention the properties of ultrasonic waves?
A8)
Properties
a)The ultrasonic waves cannot travel through vacuum.
b)These waves travel with speed same as sound wave travel in any given medium.
c)In homogeneous medium the velocity of ultrasonic wave is constant.
d)These waves can also weld some material like plastics and metals.
e)They have high energy content.
f)Ultrasonic waves get reflected, refracted and absorbed just like sound waves.
g)They can be transmitted over large distances without any appreciable loss of energy.
h)They produce intense heating effect when passed through a substance.
i)The ultrasonic waves have high frequency.
j)Because of their smaller wavelength Ultrasonic waves produce negligible diffraction effects.
k)Ultrasonic waves can produce vibrations in low viscosity liquids.
l)When the ultrasonic wave is absorbed by a medium, it produces heat because of high frequency and high energy and that energy is used to drill and cut thin metals.
Q9) What is Reverberation and Time of Reverberation?
A9)
When a sound is produced in a building, it lasts too long after its production. It reaches to the listener a number of times. Once it reaches directly from the source and subsequently after reflection from the walls, windows, ceiling and flour of hall. The listener therefore receives series of sounds of diminishing intensity. By reverberation is meant the prolonged reflection of sound from the walls, floor and ceiling of a room.
The reverberation is defined as the persistence of audible sound after the source has stopped to emit sound. The duration for which the sound is stopped is called reverberation time. This time is measured from the instant the source stops emitting sound.
The time of reverberation is defined as the time taken by the sound to fall below the minimum audibility measured from the instant when the source stopped emitting sound.
According to Prof. W. C. Sabine, the standard reverberation time is defined as the time taken by sound to fall to one millionth of its intensity just before the sound is cut off.
Q10) State Sabine’s formula for reverberation time ?
A10)
According to W. C. Sabine, the time of reverberation depends up on
1. Size of hall,
2. Loudness of the sound,
3. Kind of music or sound for which hall is to be used.
Acoustics and Ultrasonic Reverberation Time
T =0.165 V/
T =0.165 V/ A
Where V-Volume of hall in m3
a - Absorption coefficient
S - Area of reflecting surface in a square meter
Absorption of hall.
Q11) Discuss the factors affecting acoustics of buildings and their remedies?
A11)
Acoustically good hall we mean that in which every syllable or musical note reaches an audible level of loudnessat every point of the hall and then quickly dies away to make room ready for the next syllable or group of notes. Following are the factors affecting architectural acoustics.
REVERBERATION
In a hall, if the reverberation is large there is of successive sounds which result in loss of clarity in hearing. However if the reverberation is very small, the loudness is inadequate Thus the time of reverberation for a hall should neither too large nor too small. The preferred value of the time of reverberation is called optimum the reverberation time. According to W. C. Sabine standard reverberation time is given by:
T =0.165 V/
T =0.165 V/ A
Where V-Volume of hall in m3
a - Absorption coefficient
S - Area of reflecting surface in a square meter
Absorption of hall
The reverberation can be controlled by the following factors:
By providing windows and ventilators which can be opened and closed to make the optimum time of reverberation
Decorating the walls by pictures and maps
Using heavy curtains with folds
The walls are lined with absorbent material such as felt, fibreboard, glass wool etc.
Having full capacity of audience
By covering floor with carpet
By providing acoustics tiles
2.ADEQUATE LOUDNESS
With large absorption the time of reverberation will be smaller which will minimize the chances of confusion and may go below the level of intelligibility of hearing. Hence sufficient loudness in every portion of the hall is an important factor for satisfactory hearing.
The loudness can he maintained at desired level by:
Using large sounding boards behind the speaker and facing the audience.
Large polished wooden reflecting surfaces immediately above the speakers.
Low ceiling are also useful in reflecting the sound energy towards the audience.
By providing additional sound energy using more number of speakers
3.FOCUSING DUE TO WALLS AND CEILINGS
If there are focusing surfaces like concave, spherical, cylindrical or parabolic etc. on the walls or ceiling or the floor of the hall, they produce concentration of the sound in to particular region, while in some other parts no sound reaches at all. Thus there will be non- uniformity in the distribution of sound energy in the hall.
For uniform distribution of sound in the hall:
There should be no curved surfaces. If such surfaces are present, they should be covered with absorbent material.
Ceiling should be low.
Arrange speaker at the focus of parabolic reflecting surface. This will helpful to reflect beam of sound in the hall.
4. ECHOES
An echo is heard, when direct and reflected sound waves coming from the same source reach the listener with time interval of about th second. It should be avoided as far as possible by absorption.
Echoes can he avoided by:
Covering long distant walls with curtain or absorbent material
Covering high ceiling with absorbent material
5.ECHELON EFFECT
A set of railings, pillars or any regular spacing of reflected surfaces may produce a musical note due to regular succession of the echoes of the original sound to the listener. This makes the original sound confused.
This can be avoided by:
Covering steps with carpet
Covering flour with carpet
Avoid pillars in the hall
6.BALCONIES
There are chances of reflection of sound from the railing of balcony. This may lead to the problem like echelon effect or echoes.
This can be eliminated by:
Adjust height to depth ratio as 2: 1
Use grills and bars for railings instead of bricks
7.SEATING ARRANGEMENT
This is one of the factors to be taken care at the time of arranging the seats.
It preferred to arrange:
Seats perpendicular to the direction of sound for better audibility
Seats must be gradually elevated to takecare of absorption of sound energy by human body.
8.EXTRANEOUS NOISE AND SOUND INSULATION
In a good hall no noise should reach from outside. Noise may be defined as unwanted sound such as:
Outside Noise: street traffic, hammering, drilling, operating machinery, moving of furniture, electrical generator etc.
Inside Noise: machinery, typewriters, telephone, mobiles, projector etc.
This extraneous noise can be avoided by:
Avoiding openings for pipes and ventilators
Allotting suitable locations for doors and windows
Using heavy glasses to doors and windows
By providing double wall construction with air space between them
By interposing layers of some acoustical insulators
Use of soft floor finish e.g. carpet, rubber etc.
Insulating machines like refrigerators, lifts, typewriters, projector etc.
Constructing small sound proof cabin for machine and office staff
Making hall sound proof
9.FREEDOM FROM RESONANCE
If the frequency of the created sound is equal to original sound, then the original music will be reinforced. Due to the interference between original sounds is distorted. Enclosed air in the hall also causes resonance.
This can be avoided by:
Using absorbing material on reflecting surfaces
Providing decoration which include holes in the design on interior wall
Using ventilators whenever necessary
Q12)What do you mean by equipotential surface? Also discuss need of equipotential surface?
A12)
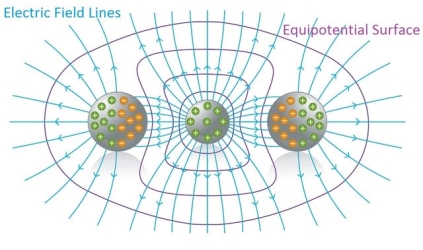
We already studied aboutElectric field lines help us to understand electric fields, because they give us a "visual" representation of an Electric field. Each of those lines represents the "direction" of the electric field, because the electric field (vector) is tangent to each point of those lines.
In a similar way, the potential at points inside of an electric field can be represented "graphically" using equipotential surfaces.
An Equipotential surface is a surface where the potential is the same (equal) for any point on top of that surface.
In an area where an electric field exists we can construct an equipotential surface that passes through any point. In the diagrams we only show some equipotential lines, mostly with the same potential difference between neighbouring surfaces. And lasty, no point can have two or more different potentials and so equipotential lines can never be tangent and can never intersect.
5 Figure
NEED OF EQUIPOTENTIAL SURFACES
When moving "along" an equipotential surface the potential is the same for any point where a test charge passes by. Which means that the electric field E doesn't produce Work to the test charge on top of an equipotential surface. More specifically the electric field E can't have a vector component tangent to that surface, so that this component can produce Work to the motion of the moving charge on top of the surface.
So, the electric field is vertically across to any point of the equipotential surface and to the equipotential surface as a whole. Something which gets us to the conclusion thatElectric field lines and Equipotential surfaces are always vertically across to each other.
Generally, electric field lines are curved lines and equipotential surfaces are curved surfaces. In the special case of a uniform field where the electric field lines are parallel to each other, the equipotential surfaces are parallel surfaces vertically across to the electric field's lines.
6 Figure: Cross Sections of equipotential surfaces (blue lines) and electric field lines (red lines) for assemblies of point charges. There are equal potentials differences between adjacent surfaces.
When the charges inside of a conductor are not moving (are at "rest") then the electric field directly outside of the conductor must be vertically across to every point on top of it's surface.
Of course the electric field E = 0 in every point inside of the conductor (electrostatics), cause else the charges would be moving. This means that the component of E that is tangent to the surface, inside of the conductor, is zero at every point. Therefore the tangent component of E directly outside of the conductor is also zero. If that was not true then we would violate the laws of electrostatics. And so, the electric field is vertically across to every point of the conductor's surface. As a result, a conductive surface is always an equipotential surface.
When the charges inside of a conductor are not moving (are at "rest") then the electric field directly outside of the conductor must be vertically across to every point on top of it's surface.
Of course the electric field E = 0 in every point inside of the conductor (electrostatics), cause else the charges would be moving. This means that the component of E that is tangent to the surface, inside of the conductor, is zero at every point. Therefore the tangent component of E directly outside of the conductor is also zero. If that was not true then we would violate the laws of electrostatics. And so, the electric field is vertically across to every point of the conductor's surface. As a result an conductive surface is always an equipotential surface.
So we concluded thatany surface over which the potential is constant is called an equipotential surface. In other words, the potential difference between any two points on an equipotential surface is zero.No work is required to move a charge from one point to another on the equipotential surface. In other words, any surface with the same electric potential at every point is termed as an equipotential surface.
Q13) Discuss important properties of equipotential surfaces ?
A13
Work done in moving a charge over an equipotential surface is zero.
The electric field is always perpendicular to an equipotential surface.
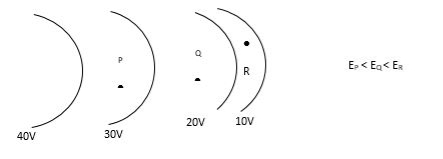
The spacing between equipotential surfaces enables us to identify regions of strong and weak fields.
Two equipotential surfaces can never intersect. If two equipotential surfaces could intersect, then at the point of intersection there would be two values of electric potential which is not possible.
For a point charge, the equipotential surfaces are concentric spherical shells.
For a uniform electric field, the equipotential surfaces are planes normal to the x-axis
The direction of the equipotential surface is from high potential to low potential.
Inside a hollow charged spherical conductor the potential is constant. This can be treated as equipotential volume. No work is required to move a charge from the centre to the surface.
For an isolated point charge, the equipotential surface is a sphere. i.e. concentric spheres around the point charge are different equipotential surfaces.
In a uniform electric field, any plane normal to the field direction is an equipotential surface.
The spacing between equipotential surfaces enables us to identify regions of a strong and weak field i.e. E= −dV/dr⇒ E ∝ 1/dr
Q14) What do you meant by gradient? Discuss its physical significance?
A14)
The gradient is a fancy word for derivative, or the rate of change of a function. It’s a vector (a direction to move) that
Points in the direction of greatest increase of a function
Is zero at a local maximum or local minimum (because there is no single direction of increase)
The term "gradient" is typically used for functions with several inputs and a single output (a scalar field). Yes, you can say a line has a gradient (its slope), but using "gradient" for single-variable functions is unnecessarily confusing. Keep it simple.
“Gradient” can refer to gradual changes of colour, but we’ll stick to the math definition. You’ll see the meanings are related.
PHYSICAL SIGNIFICANCE OF GRADIENT
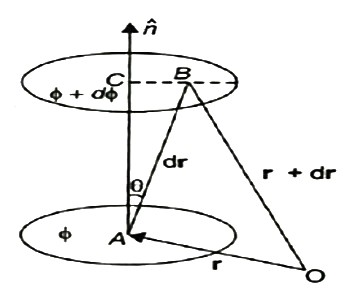
A scalar field may be represented by a series of level surfaces each having a stable value of scalar point function θ. The θ changes by a stable value as we move from one surface to another. These surfaces are known as Gaussian surfaces. Now let the two such surfaces are very close together, be represented by two scalar point functions and (θ + d θ). Let ‘r’ and (r + d θ) be the position vectors of points A and B, on the surfaces θ and (θ + d θ) correspondingly with respect to an origin 0 as shown in Figure. Clearly, the vector AB will be dr. Let the least detachment between the two surfaces ‘dn’ be in the direction of unit usual vector n at A.
9Figure
dn = dr cosθ
= | n | dr | cos θ =n .dr
Dϕ = ∂ϕ/ dn =∂ϕ/dn n .dr…… (1)
Since the continuous scalar function defining the level surfaces (Gaussian surfaces) has a value θ at point A (x, y, z) and (θ + dθ) at point (x + dx, y + dy, z + dz), we have
dϕ = ∂ ϕ/dx dx +dϕ/∂y + ∂ϕ/∂x dz
= (I ∂ϕ/∂x +j ∂ϕ/vy +k ∂ϕ/∂z) .(idx +jdy +kdz)
= ∆ ϕ. dr … … (2)
From equations (1) and (2), equating the values of d θ,
We obtain ∆θ .dr =∆ϕ= ∂ϕ/ ∂n n .dr
As dr is an arbitrary vector, we have
∆ϕ =∂ϕ/∂ n
Grad ϕ = ∂ ϕ/∂n n
Therefore, the gradient an of a scalar field at any point is a vector field, the scale of which is equal to the highest rate of increase of θ at that point and the direction of it is similar as that of usual to the level surface at that point.
Its physical significance of grad can be understand in terms of the graph of some function z = f(x, y), where f is a reasonable function – say with continuous first partial derivatives. In this case we can think of the graph as a surface whose points have variable heights over the xy – plane. An illustration is given below.
10Figure
If, say, we place a marble at some point (x, y) on this graph with zero initial force, its motion will trace out a path on the surface, and in fact it will choose the direction of steepest descent. This direction of steepest descent is given by the negative of the gradient of f. One takes the negative direction because the height is decreasing rather than increasing.
Using the language of vector fields, we may restate this as follows: For the given function f(x, y), gravitational force defines a vector field F over the corresponding surface z = f(x, y), and the initial velocity of an object at a point (x, y) is given mathematically by –∇f(x, y). The gradient also describes directions of maximum change in other contexts. For example, if we think off as describing the temperature at a point(x, y), then the gradient gives the direction in which the temperature is increasing most rapidly.
Q15) What are conservative and non-conservative forces?
A15)
A conservative force may be defined as one for which the work done in moving between two points A and B is independent of the path taken between the two points. The implication of "conservative" in this context is that you could move it from A to B by one path and return to A by another path with no net loss of energy - any closed return path to A takes net zero work.
A further implication is that the energy of an object which is subject only to that conservative force is dependent upon its position and not upon the path by which it reached that position. This makes it possible to define a potential energy function which depends upon position only.
A conservative force is a force that does zero work done in a closed path. If only these forces act then the mechanical energy of the system remains conserved. Examples of conservative force: Gravitational force, spring force etc.
On the other hand, non-conservative forces are those forces which cause loss of mechanical energy from the system. In the above case friction is the non-conservative force. But as we know energy can neither be created nor destroyed hence these forces convert mechanical energy into heat, sound, light etc.
Now, Conservative force has one more property that works done by it is independent of the path taken.
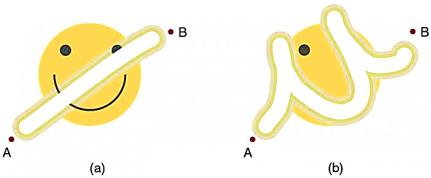
Forces are either conservative or non-conservative. Conservative forces we already discussed. A non-conservativeforce is one for which work depends on the path taken. Friction is a good example of a non-conservative force. As illustrated in Figure 11,
11 Figure
Work done against friction depends on the length of the path between the starting and ending points. Because of this dependence on path, there is no potential energy associated with non-conservative forces. An important characteristic is that the work done by a non-conservative force adds or removes mechanical energy from a system. Friction, for example, creates thermal energy that dissipates, removing energy from the system. Furthermore, even if the thermal energy is retained or captured, it cannot be fully converted back to work, so it is lost or not recoverable in that sense as well.
In Figure 11. The amount of the happy face erased depends on the path taken by the eraser between points A and B, as does the work done against friction. Less work is done and less of the face is erased for the path in (a) than for the path in (b). The force here is friction, and most of the work goes into thermal energy that subsequently leaves the system (the happy face plus the eraser). The energy expended cannot be fully recovered.
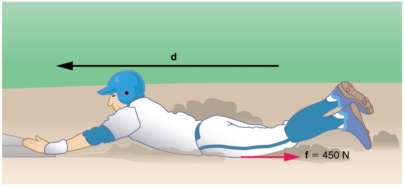
Q16) Calculate the Distance Travelled by 65.0-kg baseball player slides, given that his initial speed is 6.00 m/s and the force of friction against him is a constant 450 N ?The situation shown in Figure 13. What do you observe from result?
Figure 13
A16)
The baseball player slides to a stop in a distance d. In the process, friction removes the player’s kinetic energy by doing an amount of work equal to the initial kinetic energy.
Friction stops the player by converting his kinetic energy into other forms, including thermal energy. the work done by friction, which is negative, is added to the initial kinetic energy to reduce it to zero. The work done by friction is negative, because f is in the opposite direction of the motion (that is, θ= 180º, and so cosθ=−1). Thus Wnc =−fd. The equation simplifies to
mvi2−fd=0
or
fd= mvi2
.
Solving the previous equation for d and substituting known values yields
d= ==
d ==2.60m
The most important point of this example is that the amount of non-conservative work equals the change in mechanical energy. For example, you must work harder to stop a truck, with its large mechanical energy, than to stop a mosquito.
Q17) State Keplers laws?
A17)
In the early 1600s, Johannes Kepler proposed three laws of planetary motion. Kepler successfully gave the three statements that described the motion of planets in a sun-centered solar system. Kepler's efforts to explain the underlying reasons for such motions are no longer accepted; nonetheless, the actual laws themselves are still considered an accurate description of the motion of any planet and any satellite.
Kepler's three laws of planetary motion can be described as follows:
The path of the planets about the sun is elliptical in shape, with the center of the sun being located at one focus. (The Law of Ellipses)
An imaginary line drawn from the center of the sun to the center of the planet will sweep out equal areas in equal intervals of time. (The Law of Equal Areas).
= constant
The ratio of the squares of the periods of any two planets is equal to the ratio of the cubes of their average distances from the sun. (The Law of Harmonies)
T2 a3
Q18) Derive Kepler's Second Law?
A18)
The imaginary line joining a planet and the sons sweeps equal areas of space during equal time intervals as the planet orbits. Basically, those planets do not move with constant speed along their orbits. Rather, their speed varies so that the line joining the centres of the Sun and the planet sweeps out equal parts of an area in equal times. The point of nearest approach of the planet to the Sun is termed perihelion. The point of greatest separation is aphelion, hence by Kepler's Second Law, a planet is moving fastest when it is at perihelion and slowest at aphelion.
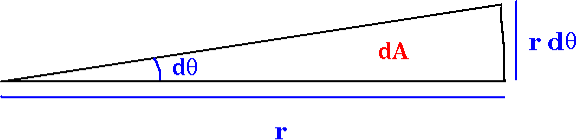
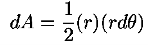
Consider a small wedge of the orbit traced out in time dt:
Figure 20
So the area of the wedge is
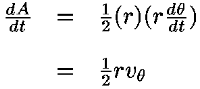
And the rate at which area is swept out on the orbit is
Now, remember the definition of Angular Momentum:
Inserting this previous equation, we get
"Equal areas in equal times" means the rate at which area is swept out on the orbit (dA/dt) is constant.
So Kepler's Second Law Revised:
The rate at which a planet sweeps out area on its orbit is equal to one-half its angular momentum divided by its mass (the specific angular momentum). Angular momentum is conserved.
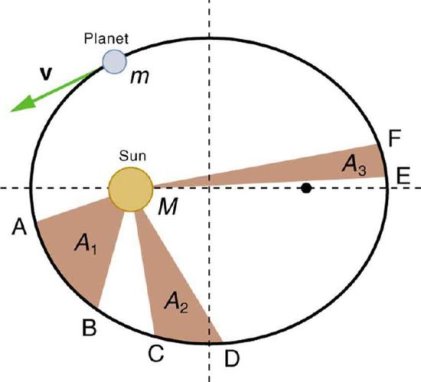
See below for an illustration of this effect. The planet traverses the distance between A and B, C and D, and E and F in equal times. When the planet is close to the Sun it has a larger velocity, making the base of the triangle larger, but the height of the triangle smaller, than when the planet is far from the Sun. One can see that the planet will travel fastest at perihelion and slowest at aphelion.
Figure 21
Kepler’s Second Law: The shaded regions have equal areas. It takes equal times for m to go from A to B, from C to D, and from E to F. The mass m moves fastest when it is closest to M. Kepler’s second law was originally devised for planets orbiting the Sun, but it has broader validity.
Q19) Derive Kepler's Third Law?
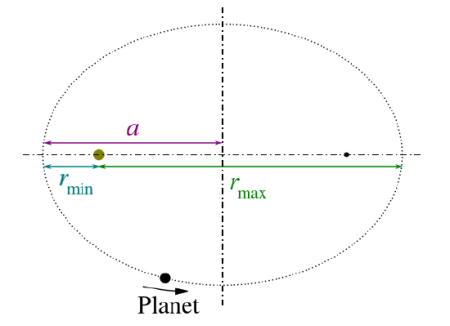
A19)
The squares of the orbital periods of the planets are directly proportional to the cubes of the semi major axes of their orbits. Kepler's Third Law implies that the period for a planet to orbit the Sun increases rapidly with the radius of its orbit. Thus we find that Mercury, the innermost planet, takes only 88 days to orbit the Sun. The earth takes 365 days, while Saturn requires 10,759 days to do the same. Though Kepler hadn't known about gravitation when he came up with his three laws, they were instrumental in Isaac Newton deriving his theory of universal gravitation, which explains the unknown force behind Kepler's Third Law. Kepler and his theories were crucial in the better understanding of our solar system dynamics and as a springboard to newer theories that more accurately approximate our planetary orbits.
We can derive Kepler’s third law by starting with Newton’s laws of motion and the universal law of gravitation. We can therefore demonstrate that the force of gravity is the cause of Kepler’s laws.
Figure 22
Consider a circular orbit of a small mass m around a large mass M. Gravity supplies the centripetal force to mass m. Starting with Newton’s second law applied to circular motion,
Fnet=mac=m
The net external force on mass m is gravity, and so we substitute the force of gravity for Fnet:
G= m
The mass m cancels, as well as an r, yielding
G=v2
The fact that m cancels out is another aspect of the oft-noted fact that at a given location all masses fall with the same acceleration. Here we see that at a given orbital radius r, all masses orbit at the same speed. This was implied by the result of the preceding worked example. Now, to get at Kepler’s third law, we must get the period T into the equation. By definition, period T is the time for one complete orbit. Now the average speed v is the circumference divided by the period—that is,
v=
Substituting this into the previous equation gives
G=
Solving for T2 yields
T2 =
Or
T2 =
Hence T2 a3
Q20) Explain Central Forces and Derive equations of motion for a particle in a central force field?
A20)
Suppose that force acting on a particle of mass m has the properties that:
•the force is always directed from m toward, or away, from a fixed point O,
•the magnitude of the force only depends on the distance r from O
Forces having these properties are called central forces. The particle is said to move in a central force field.
Figure 16:
Mathematically, F is a central force if and only if:
F=f(r)r1= f(r) ………..(1)
Where r1= is a unit vector in the direction of r.
If f(r) <0 the force is said to be attractive towards O. If f(r)>0 the force is said to be repulsive from O.
For example, the gravitational force of attraction between two point masses is a central force. The Coulomb force of attraction and repulsion between charged particles is a central force.
Properties of a Particle Moving under the Influence of a Central Force
If a particle moves in a central force field then the following properties hold:
1. The path of the particle must be a plane curve, i.e., it must lie in a plane.
2. The angular momentum of the particle is conserved, i.e., it is constant in time.
3. The particle moves in such a way that the position vector (from the point O) sweeps out equal areas in equal times. In other words, the time rate of change in area is constant. This is referred to as the Law of Areas.
Equations of Motion for a Particle in a Central Force Field
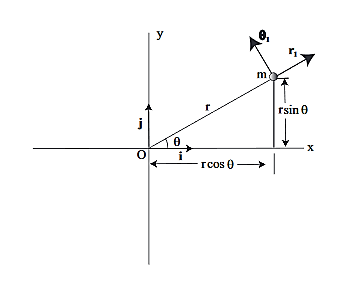
Now we will derive the basic equations of motion for a particle moving in a central force field. From Property 1 above, the motion of the particle must occur in a plane, which we take as the xy plane and the center of force is taken as the origin. In Fig. 2 we show the xy plane, as well as the polar coordinate system in the plane.
Figure 17: Polar coordinate system associated with a particle moving in the xy plane.
Since the vectorial nature of the central force is expressed in terms of a radial vector from the origin it is most natural (though not required!) to write the equations of motion in polar coordinates. In earlier lectures we derived the expression for the acceleration of a particle in polar coordinates:
………..(2)
Then, using Newton’s second law, and the mathematical form for the central force given in (1), we have:
………..(3)
………..(4)
………..(5)
These are the basic equations of motion for a particle in a central force field. They will be the starting point for many of our investigations. From these equations we can derive a useful constant of the motion. This is done as follows. From (5) we have:
……….. (6)
This is an interesting relation that, we will see, is related to properties 2 and 3 above. However, one use for it should be apparent. If you know the r component of the motion it allows you to compute the θ component by integration. This is another example of how constants of the motion allow us to “integrate” the equations of motion. It also explains why constants of the motion are often referred to as integrals of the motion. Now, let us return to property 3 above and derive the Law of Areas
Suppose that in time ∆t the position vector moves from r to r+∆r. Then the area swept out by the position vector in this time is approximately half the area of a parallelogram with sides r and ∆r. We give a proof of this:
Area of parallelogram = height×|r|=|∆r|sinθ|r|,
=|r×∆r|,
Figure 18:
Hence,
∆A=|r×∆r|
Dividing this expression by ∆t, and letting ∆t→0, gives:
lim∆t→0
Now we need to evaluate r×v. Using =rr1, we have
……….. (7)
is called the areal velocity.
Alternative Forms to the Basic Equations of Motion for a Particle in a Central Force Field
Recall the basic equations of motion as they will be our starting point:
……….. (8)
……….. (9)
We derived the following constant of the motion:
……….. (10)
This constant of the motion will allow you to determine the θ component of motion, provided you know the r component of motion. However, (8) and (9) are coupled (nonlinear) equations for the r and θ components of the motion. How could you solve them without solving for both the r and θ components? This is where alternative forms of the equations of motion are useful. Let us rewrite (8) in the following form (by dividing through by the mass m):
……….. (11)
Now, using (10), (11) can be written entirely in terms of r:
……….. (12)
We can use (12) to solve for r(t), and the use (10) to solve for θ(t).Equation (12) is a non-linear differential equation. There is a useful change of variables, which for certain important central forces, turns the equation into a linear differential equation with constant coefficients and these can always be solved analytically. Here we describe this coordinate transformation.
Let r =
This is part of the coordinate transformation. We will also use θ as a new “time” variable. Coordinate transformation are effected by the chain rule, since this allows us to express derivatives of “old” coordinates in terms of the “new” coordinates. We have:
……….. (13)
and
……….. (14)
Where, in both expressions, we have used the relation r2 =h at strategic points. Now
……….. (15)
Substituting this relation, along with (14) into (8), gives:
……….. (16)
Now if f(r) = , where K is some constant, (16) becomes a linear, constant coefficient equation
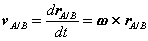
Q21) Discuss Angular velocity and angular acceleration of a rigid body?
A21)
Motion Relative to Translating Axes
Particle motion has been described using position vectors that were referred to fixed reference frames. The positions, velocities and accelerations determined in this way are referred to as absolute. Often it isn’t possible or convenient to use a fixed set of axes for the observation of motion. Many problems are simplified considerably by the use of a moving reference frame.
In the following we will restrict our attention to moving reference frames that translate but do not rotate.
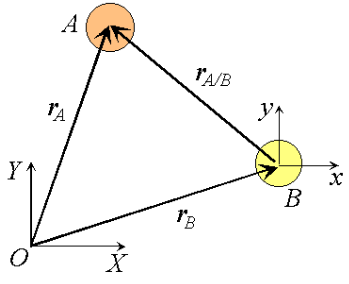
Figure 23 Observation of particle motion using a translating reference.
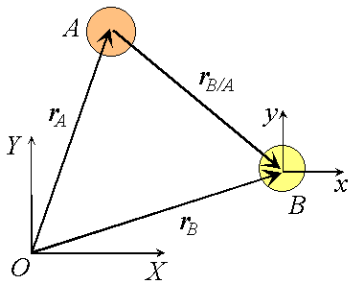
Consider two particles A and B moving along independent trajectories in the plane, and a fixed reference O. Let rA and rB be the positions of particles A and B in the fixed reference. Instead of observing the motion of particle A relative to the fixed reference as we have done in the past, we will attach a non-rotating reference to particle B and observe the motion of A relative to the moving reference at B. Let i and j be basis vectors of the moving reference, then the position vector of A relative to the reference at B, denoted rA/B is,
rA/B =xi +yj
where the subscript stands for "A with respect to B" or "A relative to B". Observe that, as the moving frame does not rotate, basis vectors i and j do not change in time. Therefore, taking time derivatives, we obtain simply,
which can be interpreted as the velocity of A relative to B. Now we can express the absolute position vector of A as,
Differentiating the equation in time to obtain expressions for the absolute velocity and acceleration of particle A:
or the absolute velocity of A equals the absolute velocity of B plus the velocity of A relative to B, vA/B , and similarly for the acceleration. The relative terms are the velocity or acceleration measured by an observer attached to the moving reference at particle B.
Figure 24 Relative velocities under change of translating reference.
What would happen if the moving reference were attached to A instead?
By comparison with expressions derived previously
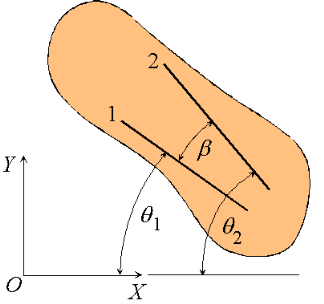
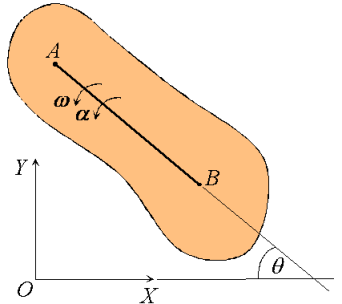
We proceed by demonstrating that every motion of a planar rigid body is associated with a single angular velocity ω and angular acceleration, describing the angular displacement of an arbitrary line inscribed in the body relative to a fixed direction.
Figure 25: Angular velocity and acceleration of a rigid body.
Consider a rigid body undergoing plane motion. The angular positions of two arbitrary lines 1 and 2 attached to the body are specified by 1and 2 measured relative to any convenient fixed reference direction. These are related to the intermediate angle shown as,
2 = 1
Observe that as the body is rigid, requiring that the distance between each pair of points on the two lines 1 and 2 is constant, angle must be invariant. Differentiating the relation above with this in mind,
These hold for arbitrary lines attached to the body, implying in turn that the body can be associated with a unique angular velocity ω, defined as,
for an arbitrary line attached to the body. Arguing analogously, the body can be associated with a unique angular acceleration defined as,
Figure 26: Angular velocity and angular acceleration of a rigid body.
Consequently, we have the property that all lines on a rigid body in its plane of motion have the same angular displacement, the same angular velocity ω and the same angular acceleration.
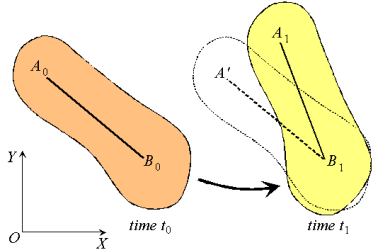
Figure 27: Decomposition of rigid body motion.
Next, consider the motion of a rigid body over the interval t0 - t1 as shown, with arbitrary point B0 taken as reference. Clearly, the motion can be consider to occur in two stages: a translation with reference B0 taking arbitrary line A0 B0 to an intermediate position A’B1; and a rotation about point B1 taking A’B1 to its final position A1B1. This corresponds to a decomposition of the motion into the sum of a translation and a rotation. While the translational motion is described by the velocity and acceleration of the reference point, the rotational motion is characterized by the unique angular velocity ω and angular acceleration associated with the body. Thus, we have the property that the motion of a rigid body can be decomposed into a translation of an arbitrary point within the body, followed by a rigid rotation of the body about this point. Further, the motion of an arbitrary point within the body is determined completely once the translational quantitiesand and rotational quantities ω and are known.
Characteristics of rigid body motion:
All lines on a rigid body have the same angular velocity ω and the same angular acceleration.
Rigid motion can be decomposed into the translation of an arbitrary point, followed by a rotation about the point.
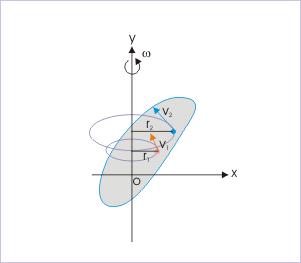
Q22) Derive equations that describe the motion of a rigid body?
A22)
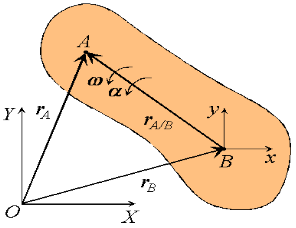
Figure 28: Definition of a translating reference attached to point B.
Consider a rigid body moving in the plane with angular velocity ω and angular acceleration , and two arbitrary points A and B of the body. We will examine the motion of this body in both, the fixed reference O shown, as well as relative to a non-rotating reference attached to point B. Proceeding, we express the absolute position of point A in terms of the absolute position of point B as,
where rA/B is the position of A relative to B. An analogous expression for absolute velocities follows by taking time derivatives,
where vA/B is the velocity of point A relative to the reference at B,
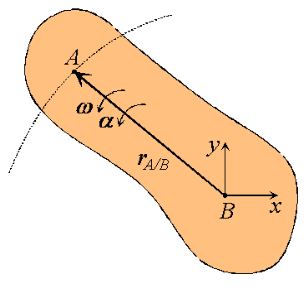
Figure 29: Motion of point A as seen by a translating observer at B.
Now, as the body moves, point A traces a circular path of radius rA/B = relative to point B, keeping the distance between the two unchanged. The angular velocity of this motion is simply the angular velocity ωof the rigid body. Then, using results derived previously for the time derivatives of rotating vectors we have:
or,
Observe that the expression reflects the decomposition of rigid body motion referred to previously. With B chosen as reference, the velocity of A is the vector sum of a translational portion vB and a rotational portion ωrA/B .
Proceeding to derive expressions for the acceleration of an arbitrary point of a rigid body, we differentiate the equation for velocities to obtain,
Where A/B , the acceleration of point A relative to the reference at B, is simply
or,
Thus, like the absolute velocity, the absolute acceleration of point A is the vector sum of a translational portion B and a rotational portion .
Q23) What is the value of Kinetic energy of rigid body in rotation?
A23)
Kinetic energy of a particle or body represents the form of energy that arises from motion. We are aware that kinetic energy of a particle in translation is given by the expression:
K=mv2
In pure rotation, however, the rigid body has no "over all" translation of the body. However, the body in rotation must have kinetic energy as it involves certain motion. A closer look on the rotation of rigid body reveals that though we may not be able to assign translation to the rigid body as a whole, but we can recognize translation of individual particles as each of them rotate about the axis in circular motion with different linear speeds. The speed of a particle is given by:
Figure 30
Pure rotational motion Each particle of the body follows a circular path about axis in pure rotational motion.
vi= ωri
Thus, kinetic energy of an individual particle is :
Ki=mivi2
where " Ki" is the kinetic energy of "i" th particle having a speed " vi". In terms of angular speed, the kinetic energy of an individual particle is:
Ki=mi(ωri2
Ki=mi(ωri)2
Now, the kinetic energy of the rigid body is sum of the kinetic energies of the particles constituting the rigid body:
K=∑Ki=∑mi(ωri)2
We note here that angular speeds of all particles constituting the body are same. Hence, the constant "1/2" and " ω2" can be taken out of the summation sign :
K =ω2∑mi(ri)2
However, we know that:
I=∑mi(ri)2
Combining two equations, we have:
K= Iω2
This is the desired expression of kinetic energy of a rigid body rotating about a fixed axis i.e. in pure rotational motion. The form of expression of the kinetic energy here emphasizes the correspondence between linear and angular quantities. Comparing with the expression of kinetic energy for translational motion, we find that "moment of inertia (I)" corresponds to "mass (m)" and "linear speed (v)" corresponds to "angular speed (ω)".
We can also interpret the result obtained above from a different perspective. We could have directly inferred that expression of kinetic energy in rotation should have an equivalent form as:
K (Kinetic energy)= x(inertia)x(speed)2
In rotation, inertia to the rotation is "moment of inertia (I)" and speed of the rigid body is "angular speed (ω)". Substituting for the quantities, we have the expression for kinetic energy of rigid body in rotation as :
K= Iω2
Comparing this equation with the expression of the sum of kinetic energy of individual particles as derived earlier:
K =ω2∑mi(ri)2
Clearly,
I= ∑mi(ri)2
This conclusion, thus, clearly establishes that the expression as given by ∑mi(ri)2
indeed represents the inertia of the rigid body in rotation.
Q24) Determine whether or not the following Forces are conservative?
(a) F= 3z2i+ cosyj+ 2xzk
(b) F=ycosxyi+xcosxyj−sinzk
A24)
(a)F= 3z2i+ cosyj+ 2xzk
For the conservative force the curl of that force must be equal to zero
=0
Let us check
= 0i+ 4zj+ 0k 0 and therefore F is not conservative.