PHY
UNIT-IIIVECTOR MECHANICSQUESTION BANK Q 1) Discuss the fundamental forces in nature?A 1)A fundamental force of nature is an attraction or repulsion between objects as described through interactions between fields and particles. Physics has identified four basic types of these interactions, which together describe every action we see in the Universe, from the decay of atomic particles to the drift of entire galaxies. From walking on the street, to launching a rocket into space, to sticking a magnet on your refrigerator, physical forces are acting all around us. But all the forces that we experience every day (and many that we don't realize we experience every day) can be whittled down to just four fundamental forces:Electromagnetic Force Gravitational Force Strong Nuclear Force Weak Nuclear Force These are called the four fundamental forces of nature, and they govern everything that happens in the universe.Electromagnetic Force This is the second strongest force after the strong force and it acts on electrically charged particles. It has strength of 1/137 relative to the strong force but has an infinite range. However, this force has both attractive and repulsive properties due to the two charges it possesses; negative and positive. Objects of like charge will have a repulsive effect on each other, while objects of unlike charges will have an attractive effect and this can be demonstrated with a simple magnet or electric charges. This is the force that's most obvious in our day-to-day lives. Thanks to the interactions of negatively-charged electrons and positively-charged protons, it allows single atoms to combine into different materials. The force is also carried through the electromagnetic field by a particle called a photon, which thanks to chemical changes in our eyes our bodies sense as light.For the sake of convenience, we distinguish the two different kinds of charges by associating an algebraic sign with q, and for this reason we talk about negative and positive charges. The electrostatic force Fb on charge qb due to charge qa is given by Coulomb's law: k is a constant of proportionality and rab is a unit vector which points from a to b. If qa and qb are both negative or both positive, the force is repulsive, but if the charges are of different sign, Fb is attractive.  = -
= - 
 In the SI system, the unit of charge is the coulomb, abbreviated C. (The coulomb is defined in terms of electric currents and magnetic forces.) In this system, k is found by experiment to bek = 8.99 x 109 N·m2/C2 2. Gravitational ForceThis force is the weakest but has an infinite range. It has strength of 6 × 10-39 in comparison to the strength of the strong force. This force is always attractive acts between any two pieces of matter in nature. The effect of this gravitational force is dependent upon the mass of the two bodies and the distance between them. Gravity is an attractive force between masses, which according to general relativity occurs as a result of the effect of energy acting on a space-time field. While theory suggests it could have a mediating particle - called a graviton - experiments are yet to support its existence. While gravity might appear to be a strong force, responsible for holding entire galaxies together and squeezing the literal daylight out of stars, it's approximately 1029 times weaker than the weak nuclear force. That means it has virtually no observable effect on the scale of tiny particles, becoming relevant only on a more cosmic level.Consider two particles, a and b, with masses Ma and Mb, respectively, separated by distance r. Let Fb be the force exerted on particle b by particle a.
In the SI system, the unit of charge is the coulomb, abbreviated C. (The coulomb is defined in terms of electric currents and magnetic forces.) In this system, k is found by experiment to bek = 8.99 x 109 N·m2/C2 2. Gravitational ForceThis force is the weakest but has an infinite range. It has strength of 6 × 10-39 in comparison to the strength of the strong force. This force is always attractive acts between any two pieces of matter in nature. The effect of this gravitational force is dependent upon the mass of the two bodies and the distance between them. Gravity is an attractive force between masses, which according to general relativity occurs as a result of the effect of energy acting on a space-time field. While theory suggests it could have a mediating particle - called a graviton - experiments are yet to support its existence. While gravity might appear to be a strong force, responsible for holding entire galaxies together and squeezing the literal daylight out of stars, it's approximately 1029 times weaker than the weak nuclear force. That means it has virtually no observable effect on the scale of tiny particles, becoming relevant only on a more cosmic level.Consider two particles, a and b, with masses Ma and Mb, respectively, separated by distance r. Let Fb be the force exerted on particle b by particle a.
Figure 3: Gravitational ForceOur verbal description of the magnitude of the force is summarized by =
= 
 G is a constant of proportionality called the gravitational constant. Its value is found by measuring the force between masses in a known geometry. The first measurements were performed by Henry Cavendish in 1771 using a torsion balance. The modern value of G is 6.67 X 10-11 N·m2/kg2. (G is the least accurately known of the fundamental constants. Perhaps you can devise a new way to measure it more precisely.) Experimentally, G is the same for all materials-aluminum, lead, neutrons, or what have you. For this reason, the law is called the universal law of gravitation.3. Strong Nuclear Force The strong nuclear force is what holds together the nuclei of atoms. This force holds the nucleus of an atom together. It is the strongest of the forces, but it is very short ranged. It acts over a range of about 10-15m, which is the average diameter of a medium sized nucleus. This force is attractive.The protons and neutrons making up an atom's nucleus are themselves made up of a trio of simpler particles called quarks. A particle called a gluon acts on a property of quarks called colour, creating the force's pull. Unlike the other three fundamental forces, the further the gluon needs to travel, the stronger the nuclear force gets. On the scale of protons and neutrons, this spring-like effect makes it incredibly hard to pull quarks apart. This helps explain why the strong force is so, well, strong.On a scale of an atom's entire nucleus, the force also binds whole protons and neutrons to each other. Protons also push each other away thanks to the electromagnetic force, putting atomic nuclei into a delicate balance.4. Weak Nuclear ForceThis force is weak compared to the strong force as the name implies and has the shortest range of 10-18m, which is 0.1% of the diameter of a proton. It is responsible for radioactive decay especially nuclear beta decay. All particles experience this force. Of all the fundamental forces, the weak nuclear force is the trickiest to grasp. It describes how the quarks that make up nuclear particles can change from one form into another. The force is carried by particles called W and Z bosons.The weak force acts over an incredibly short distance, equal to about 0.1 percent of the diameter of a proton. When a particle such as a neutrino comes right up close to a quark, the weak force causes the quark to change by sending out a W boson. This can turn a neutron into a proton (creating a whole new element in the process), and the neutrino into an electron.So We have studied that every pair of particles in the universe had its own special interaction, the task would be impossible. Fortunately, nature is kinder than this. As far as we know, there are only four fundamentally different types of interactions in the universe: gravity, electromagnetic interactions, the so-called weak interaction, and the strong interaction. Gravity and the electromagnetic interactions can act over a long range because they decrease only as the inverse square of the distance. However, the gravitational force always attracts, whereas electrical forces can either attract or repel. In large systems, electrical attraction and repulsion cancel to a high degree, and gravity alone is left. For this reason, gravitational forces dominate the cosmic scale of our universe. In contrast, the world immediately around us is dominated by the electrical forces, since they are far stronger than gravity on the atomic scale. Electrical forces are responsible for the structure of atoms, molecules, and more complex forms of matter, as well as the existence of light. The weak and strong interactions have such short ranges that they are important only at nuclear distances, typically 10-16 m. They are negligible even at atomic distances, 10-10 m. As its name implies, the strong interaction is very strong, much stronger than the electromagnetic force at nuclear distances. It is the "glue" that binds the atomic nucleus, but aside from this it has little effect in the everyday world. The weak interaction plays a less dramatic role; it mediates in the creation and destruction of neutrinos-particles of no mass and no charge which are essential to our understanding of matter but which can be detected only by the most arduous experiments. Our object in the remainder of the chapter is to become familiar with the forces which are important in everyday mechanics. Two of these, the forces of gravity and electricity, are fundamental and cannot be explained in simpler terms. The other forces we shall discuss, friction, the contact force, and the viscous force, can be understood as the macroscopic manifestation of interatomic forces. Q 2) Discuss the transformation of scalars and vectors under rotation transformation? A 2)Certain physical quantities such as mass or the absolute temperature at some point in space only have magnitude. A single number can represent each of these quantities, with appropriate units, which are called scalar quantities. There are, however, other physical quantities that have both magnitude and direction. Force is an example of a quantity that has both direction and magnitude (strength). Three numbers are needed to represent the magnitude and direction of a vector quantity in a three dimensional space. These quantities are called vector quantities. Vector quantities also satisfy two distinct operations, vector addition and multiplication of a vector by a scalar. We can add two forces together and the sum of the forces must satisfy the rule for vector addition. We can multiply a force by a scalar thus increasing or decreasing its strength. Position, displacement, velocity, acceleration, force, and momentum are all physical quantities that can be represented mathematically by vectors. The set of vectors and the two operations form what is called a vector space. There are many types of vector spaces but we shall restrict our attention to the very familiar type of vector space in three dimensions that most students have encountered in their mathematical courses. Vectors are sets of three quantities that transform in the same manner as the coordinates of a point P.
G is a constant of proportionality called the gravitational constant. Its value is found by measuring the force between masses in a known geometry. The first measurements were performed by Henry Cavendish in 1771 using a torsion balance. The modern value of G is 6.67 X 10-11 N·m2/kg2. (G is the least accurately known of the fundamental constants. Perhaps you can devise a new way to measure it more precisely.) Experimentally, G is the same for all materials-aluminum, lead, neutrons, or what have you. For this reason, the law is called the universal law of gravitation.3. Strong Nuclear Force The strong nuclear force is what holds together the nuclei of atoms. This force holds the nucleus of an atom together. It is the strongest of the forces, but it is very short ranged. It acts over a range of about 10-15m, which is the average diameter of a medium sized nucleus. This force is attractive.The protons and neutrons making up an atom's nucleus are themselves made up of a trio of simpler particles called quarks. A particle called a gluon acts on a property of quarks called colour, creating the force's pull. Unlike the other three fundamental forces, the further the gluon needs to travel, the stronger the nuclear force gets. On the scale of protons and neutrons, this spring-like effect makes it incredibly hard to pull quarks apart. This helps explain why the strong force is so, well, strong.On a scale of an atom's entire nucleus, the force also binds whole protons and neutrons to each other. Protons also push each other away thanks to the electromagnetic force, putting atomic nuclei into a delicate balance.4. Weak Nuclear ForceThis force is weak compared to the strong force as the name implies and has the shortest range of 10-18m, which is 0.1% of the diameter of a proton. It is responsible for radioactive decay especially nuclear beta decay. All particles experience this force. Of all the fundamental forces, the weak nuclear force is the trickiest to grasp. It describes how the quarks that make up nuclear particles can change from one form into another. The force is carried by particles called W and Z bosons.The weak force acts over an incredibly short distance, equal to about 0.1 percent of the diameter of a proton. When a particle such as a neutrino comes right up close to a quark, the weak force causes the quark to change by sending out a W boson. This can turn a neutron into a proton (creating a whole new element in the process), and the neutrino into an electron.So We have studied that every pair of particles in the universe had its own special interaction, the task would be impossible. Fortunately, nature is kinder than this. As far as we know, there are only four fundamentally different types of interactions in the universe: gravity, electromagnetic interactions, the so-called weak interaction, and the strong interaction. Gravity and the electromagnetic interactions can act over a long range because they decrease only as the inverse square of the distance. However, the gravitational force always attracts, whereas electrical forces can either attract or repel. In large systems, electrical attraction and repulsion cancel to a high degree, and gravity alone is left. For this reason, gravitational forces dominate the cosmic scale of our universe. In contrast, the world immediately around us is dominated by the electrical forces, since they are far stronger than gravity on the atomic scale. Electrical forces are responsible for the structure of atoms, molecules, and more complex forms of matter, as well as the existence of light. The weak and strong interactions have such short ranges that they are important only at nuclear distances, typically 10-16 m. They are negligible even at atomic distances, 10-10 m. As its name implies, the strong interaction is very strong, much stronger than the electromagnetic force at nuclear distances. It is the "glue" that binds the atomic nucleus, but aside from this it has little effect in the everyday world. The weak interaction plays a less dramatic role; it mediates in the creation and destruction of neutrinos-particles of no mass and no charge which are essential to our understanding of matter but which can be detected only by the most arduous experiments. Our object in the remainder of the chapter is to become familiar with the forces which are important in everyday mechanics. Two of these, the forces of gravity and electricity, are fundamental and cannot be explained in simpler terms. The other forces we shall discuss, friction, the contact force, and the viscous force, can be understood as the macroscopic manifestation of interatomic forces. Q 2) Discuss the transformation of scalars and vectors under rotation transformation? A 2)Certain physical quantities such as mass or the absolute temperature at some point in space only have magnitude. A single number can represent each of these quantities, with appropriate units, which are called scalar quantities. There are, however, other physical quantities that have both magnitude and direction. Force is an example of a quantity that has both direction and magnitude (strength). Three numbers are needed to represent the magnitude and direction of a vector quantity in a three dimensional space. These quantities are called vector quantities. Vector quantities also satisfy two distinct operations, vector addition and multiplication of a vector by a scalar. We can add two forces together and the sum of the forces must satisfy the rule for vector addition. We can multiply a force by a scalar thus increasing or decreasing its strength. Position, displacement, velocity, acceleration, force, and momentum are all physical quantities that can be represented mathematically by vectors. The set of vectors and the two operations form what is called a vector space. There are many types of vector spaces but we shall restrict our attention to the very familiar type of vector space in three dimensions that most students have encountered in their mathematical courses. Vectors are sets of three quantities that transform in the same manner as the coordinates of a point P.Having a magnitude and direction is not sufficient to define a vector. Some transformations cannot be written in terms of a series of rotations. An example is an inversion. These are called improper rotations. Transformations that can be written in terms of a series of rotations are called proper rotations. The laws of Physics are invariant'' under rotations of the coordinate system. Rotational symmetry of laws of Physics implies conservation of Angular Momentum. We will work with Passive Rotations'' where we rotate the coordinate axes rather than active rotations'' where we rotate the physical system and keep the axes fixed. These are essentially the same thing except the rotation angle changes sign. A vector is a mathematical object that transforms in a particular way under rotations. We know there are also physical quantities called scalars that are invariant under rotations. Very often in practical problems, the components of a vector are known in one coordinate system but it is necessary to find them in some other coordinate system.The relationship between the components in one coordinate system and the components in a second coordinate system are called the transformation equations. Any change of Cartesian coordinate system will be due to a translation of the base vectors and a rotation of the base vectors. A translation of the base vectors does not change the components of a vector. Rotation of object relative to FIXED axis:Basic equations you can get by looking at the diagram above:x1= rcosα …………(1)x2=rcos(θ+α) …………(2)y1=rsinα …………(3) y2=rsin(θ+α) …………(4)
Figure 1: Rotation of object relative to fixed axis Using trigonometric results the equations (2) and (4) become x2=rcos(θ+α)=rcosθcosα–rsinθsinα=(rcosα)cosθ–(rsinα)sinθ=x1cosθ–y1sinθ …………(5)y2=rsin(θ+α)=rsinθcosα+rcosθsinα=(rcosα)cosθ+(rsinα)cosθ=x1sinθ+y1cosθ …………(6)Hence, For an anti-clockwise rotation, =
=  …………(7)is called the rotation matrix. Its determinant is 1.To find the clockwise rotation matrix, you can do the calculations again. OR you can just transpose the above matrix OR you can substitute −θ into the matrix. Hence, the clockwise rotation matrix is:
…………(7)is called the rotation matrix. Its determinant is 1.To find the clockwise rotation matrix, you can do the calculations again. OR you can just transpose the above matrix OR you can substitute −θ into the matrix. Hence, the clockwise rotation matrix is:  Note: Since clockwise rotation means rotating in the anti-clockwise direction by −θ, you can just substitute −θ into the anti-clockwise matrix to get the clockwise matrix. Since cos is an even function, it will not be affected by the −θ. (- cos x = cos x) Rotation of coordinate axes:
Note: Since clockwise rotation means rotating in the anti-clockwise direction by −θ, you can just substitute −θ into the anti-clockwise matrix to get the clockwise matrix. Since cos is an even function, it will not be affected by the −θ. (- cos x = cos x) Rotation of coordinate axes:
Figure 2: Rotation of coordinate axes Basic equations:x′=rcosα …………(8)x=rcos(θ+α) …………(9)y′=rsin …………(10)y=rsin(θ+α) …………(11)Using trigonometric results the equations (9) and (11) become x=rcos(θ+α)=rcosθcosα–rsinθsinα=x′cosθ–y′sinθ …………(12)y=rsin(θ+α)=rsinθcosα+rcosθsinα=x′sinθ+y′cosθ …………(13)From equation (13) So we havex′=  …………(14)y′=
…………(14)y′=  …………(15)Substitute the above (14) and (15) equations into equation (12) and you will get:y′=−xsinθ+ycosθx′=xcosθ+ysinθHence,
…………(15)Substitute the above (14) and (15) equations into equation (12) and you will get:y′=−xsinθ+ycosθx′=xcosθ+ysinθHence, =
=  …………(16)
…………(16) …………(17) Q 3) State Newton’s first law of motion? Discuss it by giving some example? A 3)NEWTON’S FIRST LAWHow do the forces that act on a body affect its motion? To begin to answer this question, let’s first consider what happens when the net force on a body is zero. You would almost certainly agree that if a body is at rest, and if no net force acts on it (that is, no net push or pull), that body will remain at rest. But what if there is zero net force acting on a body in motion? To see what happens in this case, suppose you slide a hockey puck along a horizontal table top, applying a horizontal force to it with your hand (Figure 4).
…………(17) Q 3) State Newton’s first law of motion? Discuss it by giving some example? A 3)NEWTON’S FIRST LAWHow do the forces that act on a body affect its motion? To begin to answer this question, let’s first consider what happens when the net force on a body is zero. You would almost certainly agree that if a body is at rest, and if no net force acts on it (that is, no net push or pull), that body will remain at rest. But what if there is zero net force acting on a body in motion? To see what happens in this case, suppose you slide a hockey puck along a horizontal table top, applying a horizontal force to it with your hand (Figure 4).
Figure 4: Table: puck stops short After you stop pushing, the puck does not continue to move indefinitely; it slows down and stops. To keep it moving, you have to keep pushing (that is, applying a force). You might come to the “common sense” conclusion that bodies in motion naturally come to rest and that a force is required to sustain motion.
Figure 5: Table: Ice: puck slides fartherBut now imagine pushing the puck across a smooth surface of ice (Figure 5). After you quit pushing, the puck will slide a lot farther before it stops. Put it on an air-hockey table, where it floats on a thin cushion of air, and it moves still farther (Figure 6).
Figure 6: Air-hockey table: puck slides even fartherIn each case, what slows the puck down is friction, an inter-action between the lower surface of the puck and the surface on which it slides. Each surface exerts a friction force on the puck that resists the puck’s motion; the difference in the three cases is the magnitude of the friction force. The ice exerts less friction than the table top, so the puck travels farther. The gas molecules of the air-hockey table exert the least friction of all. If we could eliminate friction completely, the puck would never slow down, and we would need no force at all to keep the puck moving once it had been started. Thus the “common sense” idea that a force is required to sustain motion is incorrect. Experiments like the ones we’ve just described show that when no net force acts on a body, the body either remains at rest or moves with constant velocity in a straight line. Once a body has been set in motion, no net force is needed to keep it moving. We call this observation Newton’s first law of motion.Newton’s First law can also be written as A body acted on by no net force has a constant velocity (which may be zero) and zero accelerationThe tendency of a body to keep moving once it is set in motion is called inertia.It’s important to note that the net force is what matters in Newton’s first lawExample Suppose a hockey puck rests on a horizontal surface with negligible friction, such as an air-hockey table or a slab of wet ice.
Figure 7: (a) A hockey puck accelerates in the direction of a net applied force  . (b) When the net force is zero, the acceleration is zero, and the puck is in equilibrium.If the puck is initially at rest and a single horizontal force
. (b) When the net force is zero, the acceleration is zero, and the puck is in equilibrium.If the puck is initially at rest and a single horizontal force  acts on it (Figure 7a), the puck starts to move. If the puck is in motion to begin with, the force changes its speed, its direction, or both, depending on the direction of the force. In this case the net force is equal to
acts on it (Figure 7a), the puck starts to move. If the puck is in motion to begin with, the force changes its speed, its direction, or both, depending on the direction of the force. In this case the net force is equal to  which is not zero. (There are also two vertical forces: the earth’s gravitational attraction and the upward normal force exerted by the surface. But as we mentioned earlier, these two forces cancel.)Now suppose we apply a second force,
which is not zero. (There are also two vertical forces: the earth’s gravitational attraction and the upward normal force exerted by the surface. But as we mentioned earlier, these two forces cancel.)Now suppose we apply a second force,  (Figure 7b), equal in magnitude to
(Figure 7b), equal in magnitude to  but opposite in direction. The two forces are negatives of each other,
but opposite in direction. The two forces are negatives of each other, 
 ,and their vector sum is zero
,and their vector sum is zero
 Again, we find that if the body is at rest at the start, it remains at rest; if it is initially moving, it continues to move in the same direction with constant speed. These results show that in Newton’s first law, zero net force is equivalent to no force at all. This is just the principle of superposition of forces. When a body is either at rest or moving with constant velocity (in a straight line with constant speed), we say that the body is in equilibrium. For a body to be in equilibrium, it must be acted on by no forces, or by several forces such that their vector sum that is, the net force is zero.Q4) State Newton’s second law of motion? Discuss it by giving some example? A 4)NEWTON’S SECOND LAWNewton’s first law tells us that when a body is acted on by zero net force, the body moves with constant velocity and zero acceleration. In Figure 8(a), a hockey puck is sliding to the right on wet ice. There is negligible friction, so there are no horizontal forces acting on the puck; the downward force of gravity and the upward normal force exerted by the ice surface sum to zero. So the net force
Again, we find that if the body is at rest at the start, it remains at rest; if it is initially moving, it continues to move in the same direction with constant speed. These results show that in Newton’s first law, zero net force is equivalent to no force at all. This is just the principle of superposition of forces. When a body is either at rest or moving with constant velocity (in a straight line with constant speed), we say that the body is in equilibrium. For a body to be in equilibrium, it must be acted on by no forces, or by several forces such that their vector sum that is, the net force is zero.Q4) State Newton’s second law of motion? Discuss it by giving some example? A 4)NEWTON’S SECOND LAWNewton’s first law tells us that when a body is acted on by zero net force, the body moves with constant velocity and zero acceleration. In Figure 8(a), a hockey puck is sliding to the right on wet ice. There is negligible friction, so there are no horizontal forces acting on the puck; the downward force of gravity and the upward normal force exerted by the ice surface sum to zero. So the net force  acting on the puck is zero, the puck has zero acceleration, and its velocity is constant.But what happens when the net force is not zero? In Figure 8 (b) we apply a constant horizontal force to a sliding puck in the same direction that the puck is moving. Then
acting on the puck is zero, the puck has zero acceleration, and its velocity is constant.But what happens when the net force is not zero? In Figure 8 (b) we apply a constant horizontal force to a sliding puck in the same direction that the puck is moving. Then  is constant and in the same horizontal direction as
is constant and in the same horizontal direction as  . We find that during the time the force is acting, the velocity of the puck changes at a constant rate; that is, the puck moves with constant acceleration. The speed of the puck increases, so the acceleration
. We find that during the time the force is acting, the velocity of the puck changes at a constant rate; that is, the puck moves with constant acceleration. The speed of the puck increases, so the acceleration  is in the same direction as
is in the same direction as  and
and  .In Figure 8(c) we reverse the direction of the force on the puck so that
.In Figure 8(c) we reverse the direction of the force on the puck so that  acts opposite to
acts opposite to  . In this case as well, the puck has acceleration; the puck moves more and more slowly to the right. The acceleration
. In this case as well, the puck has acceleration; the puck moves more and more slowly to the right. The acceleration  in this case is to the left, in the same direction as
in this case is to the left, in the same direction as . As in the previous case, experiment shows that the acceleration is constant if
. As in the previous case, experiment shows that the acceleration is constant if  is constant. We conclude that net force acting on a body causes the body to accelerate in the same direction as the net force. If the magnitude of the net force is constant, as in Figures 8(b) and 8(c), then so is the magnitude of the acceleration.
is constant. We conclude that net force acting on a body causes the body to accelerate in the same direction as the net force. If the magnitude of the net force is constant, as in Figures 8(b) and 8(c), then so is the magnitude of the acceleration.
Figure 8: Using a hockey puck on a friction-less surface to explore the relationship between the net force  on a body and the resulting acceleration
on a body and the resulting acceleration  of the body.Our results mean that for a given body, the ratio of the magnitude
of the body.Our results mean that for a given body, the ratio of the magnitude  of the net force to the magnitude a=
of the net force to the magnitude a=  of the acceleration is constant, regardless of the magnitude of the net force. We call this ratio the inertial mass, or simply the mass, of the body and denote it by m. That is,m=
of the acceleration is constant, regardless of the magnitude of the net force. We call this ratio the inertial mass, or simply the mass, of the body and denote it by m. That is,m=  or
or  =ma or a=
=ma or a=  Mass is a quantitative measure of inertia. The above equations says that the greater a body’s mass, the more the body “resists” being accelerated. When you hold a piece of fruit in your hand at the supermarket and move it slightly up and down to estimate its heft, you’re applying a force and seeing how much the fruit accelerates up and down in response. If a force causes a large acceleration, the fruit has a small mass; if the same force causes only a small acceleration, the fruit has a large mass. One newton is the amount of net force that gives an acceleration of 1 meter per second squared to a body with a mass of 1 kilogram.For the same net force, the ratio of the masses of two bodies is the inverse of the ratio of their accelerations.
Mass is a quantitative measure of inertia. The above equations says that the greater a body’s mass, the more the body “resists” being accelerated. When you hold a piece of fruit in your hand at the supermarket and move it slightly up and down to estimate its heft, you’re applying a force and seeing how much the fruit accelerates up and down in response. If a force causes a large acceleration, the fruit has a small mass; if the same force causes only a small acceleration, the fruit has a large mass. One newton is the amount of net force that gives an acceleration of 1 meter per second squared to a body with a mass of 1 kilogram.For the same net force, the ratio of the masses of two bodies is the inverse of the ratio of their accelerations. =
=  So Newton’s second law States that If a net external force acts on a body, the body accelerates. The direction of acceleration is the same as the direction of the net force. The mass of the body times the acceleration vector of the body equals the net force vector
So Newton’s second law States that If a net external force acts on a body, the body accelerates. The direction of acceleration is the same as the direction of the net force. The mass of the body times the acceleration vector of the body equals the net force vector =maNewton’s second law is a fundamental law of nature, the basic relationship be-tween force and motion. The statement of Newton’s second law refers to external forces. It’s impossible for a body to affect its own motion by exerting a force on itself; if it were possible, you could lift yourself to the ceiling by pulling up on your belt. That’s why only external forces are included in the sum
=maNewton’s second law is a fundamental law of nature, the basic relationship be-tween force and motion. The statement of Newton’s second law refers to external forces. It’s impossible for a body to affect its own motion by exerting a force on itself; if it were possible, you could lift yourself to the ceiling by pulling up on your belt. That’s why only external forces are included in the sum  . The design of high-performance motorcycles depends fundamentally on Newton’s second law. To maximize the forward acceleration, the designer makes the motorcycle as light as possible (that is, minimizes the mass) and uses the most powerful engine possible (thus maximizing the forward force).Light weight body (small m) Powerful engine (large F)application Blame Newton’s Second Law. The above equations are valid only when the mass m is constant. It ’s easy to think of systems whose masses change, such as a leaking tank truck, a rocket ship, or a moving railroad car being loaded with coal. Such systems are better handled by using the concept of momentum.Finally, Newton’s second law is valid in inertial frames of reference only, just like the first law. Thus it is not valid in the reference frame of any of the accelerating vehicles relative to any of these frames; the passenger accelerates even though the net force on the passenger is zero. We will usually assume that the earth is an adequate approximation to an inertial frame, although because of its rotation and orbital motion it is not precisely inertial.Here is something important to discuss that m
. The design of high-performance motorcycles depends fundamentally on Newton’s second law. To maximize the forward acceleration, the designer makes the motorcycle as light as possible (that is, minimizes the mass) and uses the most powerful engine possible (thus maximizing the forward force).Light weight body (small m) Powerful engine (large F)application Blame Newton’s Second Law. The above equations are valid only when the mass m is constant. It ’s easy to think of systems whose masses change, such as a leaking tank truck, a rocket ship, or a moving railroad car being loaded with coal. Such systems are better handled by using the concept of momentum.Finally, Newton’s second law is valid in inertial frames of reference only, just like the first law. Thus it is not valid in the reference frame of any of the accelerating vehicles relative to any of these frames; the passenger accelerates even though the net force on the passenger is zero. We will usually assume that the earth is an adequate approximation to an inertial frame, although because of its rotation and orbital motion it is not precisely inertial.Here is something important to discuss that m is not a force even though the vector m
is not a force even though the vector m is equal to the vector sum
is equal to the vector sum  of all the forces acting on the body, the vector m
of all the forces acting on the body, the vector m is not a force. Acceleration is a result of a nonzero net force; it is not a force itself. It’s “common sense” to think that there is a “force of acceleration” that pushes you back into your seat when your car accelerates forward from rest. But there is no such force; instead, your inertia causes you to tend to stay at rest relative to the earth, and the car accelerates around you, The “common sense” confusion arises from trying to apply Newton’s second law where it isn’t valid—in the non-inertial reference frame of an accelerating car. We will always examine motion relative to inertial frames of reference only. Q5) Discuss conservation of angular momentum and energy for a particle in a central force field?A 5)ANGULAR MOMENTUMConsider the angular momentum of the reduced mass system L = r × p = r ×
is not a force. Acceleration is a result of a nonzero net force; it is not a force itself. It’s “common sense” to think that there is a “force of acceleration” that pushes you back into your seat when your car accelerates forward from rest. But there is no such force; instead, your inertia causes you to tend to stay at rest relative to the earth, and the car accelerates around you, The “common sense” confusion arises from trying to apply Newton’s second law where it isn’t valid—in the non-inertial reference frame of an accelerating car. We will always examine motion relative to inertial frames of reference only. Q5) Discuss conservation of angular momentum and energy for a particle in a central force field?A 5)ANGULAR MOMENTUMConsider the angular momentum of the reduced mass system L = r × p = r ×  . How does angular momentum L change with time? We have
. How does angular momentum L change with time? We have ……….(1)We use the product rule, which is valid for cross products as long as you don’t change the order of the factors. The second term after cross product is zero since (
……….(1)We use the product rule, which is valid for cross products as long as you don’t change the order of the factors. The second term after cross product is zero since ( ×
×  = 0). Recall that r × F which occurs in above expression is called the torque τ. We have shown that in the case of central forces the time derivative of the angular momentum, and hence the torque, are zero. Therefore:
= 0). Recall that r × F which occurs in above expression is called the torque τ. We have shown that in the case of central forces the time derivative of the angular momentum, and hence the torque, are zero. Therefore: ……….(2) i.e. the angular momentum is conserved.The force F (r) depends only on the distance of the reduced mass from the center of mass and not on the orientation of the system in space. Therefore, this system is spherically symmetric; it is invariant (unchanged) under rotations. Noether’s theorem states that whenever the laws of physics are invariant under a particular motion or other operation, there will be a corresponding conserved quantity. In this case, we see that the conservation of angular momentum is related to the invariance of the physical system under rotations. This further can explain as belowAngular momentum: A vector quantity describing an object in circular motion; its magnitude is equal to the momentum of the particle, and the direction is perpendicular to the plane of its circular motion.Angular momentum is the rotational analog of linear momentum, it is denoted by l, and angular momentum of a particle in rotational motion is defined as:l = r × pThis is a cross product of r, i.e. the radius of the circle formed by the body in rotational motion, and p, i.e. the linear momentum of the body, the magnitude of a cross product of two vectors is always the product of their magnitude multiplied with the sine of the angle between them, therefore in the case of angular momentum the magnitude is given by, l = r p sinθThe law of conservation of angular momentum states that when no external torque acts on an object, no change of angular momentum will occur. For this let us derive relation between torque and angular momentumTorque and Angular Momentum RelationshipRelationship between torque and angular momentum can found as follows,
……….(2) i.e. the angular momentum is conserved.The force F (r) depends only on the distance of the reduced mass from the center of mass and not on the orientation of the system in space. Therefore, this system is spherically symmetric; it is invariant (unchanged) under rotations. Noether’s theorem states that whenever the laws of physics are invariant under a particular motion or other operation, there will be a corresponding conserved quantity. In this case, we see that the conservation of angular momentum is related to the invariance of the physical system under rotations. This further can explain as belowAngular momentum: A vector quantity describing an object in circular motion; its magnitude is equal to the momentum of the particle, and the direction is perpendicular to the plane of its circular motion.Angular momentum is the rotational analog of linear momentum, it is denoted by l, and angular momentum of a particle in rotational motion is defined as:l = r × pThis is a cross product of r, i.e. the radius of the circle formed by the body in rotational motion, and p, i.e. the linear momentum of the body, the magnitude of a cross product of two vectors is always the product of their magnitude multiplied with the sine of the angle between them, therefore in the case of angular momentum the magnitude is given by, l = r p sinθThe law of conservation of angular momentum states that when no external torque acts on an object, no change of angular momentum will occur. For this let us derive relation between torque and angular momentumTorque and Angular Momentum RelationshipRelationship between torque and angular momentum can found as follows, =
=  Differentiating LHS and RHS,
Differentiating LHS and RHS, =
=  By the property of differentiation on cross products the above expression can be written as follows,
By the property of differentiation on cross products the above expression can be written as follows, =
=  +
+
 is change in displacement with time, therefore it is linear velocity
is change in displacement with time, therefore it is linear velocity 
 =
=  +
+
 is linear momentum i.e. mass times velocity,
is linear momentum i.e. mass times velocity, =
=  +
+ Now notice the first term, there is
Now notice the first term, there is  ×
×  magnitude of cross product is given by
magnitude of cross product is given by ×
×  sinθ where the angle is 0 hence the whole term becomes 0.From newton’s 2nd law we know that
sinθ where the angle is 0 hence the whole term becomes 0.From newton’s 2nd law we know that  is force,
is force, =
=  We know that r × F is torque, hence
We know that r × F is torque, hence =
=  (torque)So rate of change of angular momentum is torque.Now this statement seems clearer to you; The law of conservation of angular momentum states that when no external torque acts on an object, no change of angular momentum will occur. The conserved quantity we are investigating is called angular momentum. The symbol for angular momentum is the letter L. Just as linear momentum is conserved when there is no net external force, angular momentum is constant or conserved when the net torque is zero.
(torque)So rate of change of angular momentum is torque.Now this statement seems clearer to you; The law of conservation of angular momentum states that when no external torque acts on an object, no change of angular momentum will occur. The conserved quantity we are investigating is called angular momentum. The symbol for angular momentum is the letter L. Just as linear momentum is conserved when there is no net external force, angular momentum is constant or conserved when the net torque is zero.
 For the situation in which the net torque is zero,
For the situation in which the net torque is zero, 
 =0 If the change in angular momentum Δl is zero, then the angular momentum is constant; therefore,
=0 If the change in angular momentum Δl is zero, then the angular momentum is constant; therefore, =constant(when net τ=0).This is an expression for the law of conservation of angular momentum.CONSERVATION OF ENERGY FOR A PARTICLE IN A CENTRAL FORCE FIELDSince central forces are conservative forces, we know that total energy must be conserved. Now we derive expressions for the total energy of a particle of mass m in a central force field. We will do this in two ways.First MethodFirst we compute the kinetic energy. The velocity is given by:
=constant(when net τ=0).This is an expression for the law of conservation of angular momentum.CONSERVATION OF ENERGY FOR A PARTICLE IN A CENTRAL FORCE FIELDSince central forces are conservative forces, we know that total energy must be conserved. Now we derive expressions for the total energy of a particle of mass m in a central force field. We will do this in two ways.First MethodFirst we compute the kinetic energy. The velocity is given by: And therefore
And therefore The kinetic energy is given by:
The kinetic energy is given by: Therefore we have:
Therefore we have: ……….. (18) Q6) State Newton’s third law of motion? Discuss it by giving some example? A 6)NEWTON’S THIRD LAWForce acting on a body is always the result of its interaction with another body, so forces always come in pairs. You can’t pull on a doorknob without the door-knob pulling back on you. When you kick a football, the forward force that your foot exerts on the ball launches it into its trajectory, but you also feel the force the ball exerts back on your foot. In each of these cases, the force that you exert on the other body is in the opposite direction to the force that body exerts on you. Experiments show that whenever two bodies interact, the two forces that they exert on each other are always equal in magnitude and opposite in direction. This fact is called Newton’s third law of motion: If body A exerts a force on body B (an “action”), then body B exerts a force on body A (a “reaction”). These two forces have the same magnitude but are opposite in direction. These two forces act on different bodies.OrTo every action there is equal and opposite reaction.For example,
……….. (18) Q6) State Newton’s third law of motion? Discuss it by giving some example? A 6)NEWTON’S THIRD LAWForce acting on a body is always the result of its interaction with another body, so forces always come in pairs. You can’t pull on a doorknob without the door-knob pulling back on you. When you kick a football, the forward force that your foot exerts on the ball launches it into its trajectory, but you also feel the force the ball exerts back on your foot. In each of these cases, the force that you exert on the other body is in the opposite direction to the force that body exerts on you. Experiments show that whenever two bodies interact, the two forces that they exert on each other are always equal in magnitude and opposite in direction. This fact is called Newton’s third law of motion: If body A exerts a force on body B (an “action”), then body B exerts a force on body A (a “reaction”). These two forces have the same magnitude but are opposite in direction. These two forces act on different bodies.OrTo every action there is equal and opposite reaction.For example,  A on B is the force applied by body A (first sub-script) on body B (second subscript), and
A on B is the force applied by body A (first sub-script) on body B (second subscript), and  B on A is the force applied by body B(first subscript) on body A (second subscript).
B on A is the force applied by body B(first subscript) on body A (second subscript).
Figure 9: Newton’s third law of motion In equation form, A on B =
A on B =  B on AIn the statement of Newton’s third law, “action” and “reaction” are the two opposite forces; we sometimes refer to them as an action–reaction pair. This is not meant to imply any cause-and-effect relation-ship; we can consider either force as the “action” and the other as the “reaction.” We often say simply that the forces are “equal and opposite,” meaning that they have equal magnitudes and opposite directions. the two forces in an action–reaction pair act on different bodies We stress that the two forces described in Newton’s third law act on different bodies. The action and reaction forces are contact forces that are present only when the two bodies are touching. But Newton’s third law also applies to long-range forces that do not require physical contact, such as the force of gravitational attraction. A table-tennis ball exerts an upward gravitational force on the earth that’s equal in magnitude to the downward gravitational force the earth exerts on the ball. When you drop the ball, both the ball and the earth accelerate toward each other. The net force on each body has the same magnitude, but the earth’s acceleration is microscopically small because its mass is so great. Nevertheless, it does move. Q 7) What do you mean by equipotential surface? Also discuss need of equipotential surface?A 7)EQUIPOTENTIAL SURFACES We already studied about Electric field lines help us to understand electric fields, because they give us a "visual" representation of an Electric field. Each of those lines represents the "direction" of the electric field, because the electric field (vector) is tangent to each point of those lines.In a similar way, the potential at points inside of an electric field can be represented "graphically" using equipotential surfaces.An Equipotential surface is a surface where the potential is the same (equal) for any point on top of that surface. In an area where an electric field exists we can construct an equipotential surface that passes through any point. In the diagrams we only show some equipotential lines, mostly with the same potential difference between neighbouring surfaces. And lasty, no point can have two or more different potentials and so equipotential lines can never be tangent and can never intersect.
B on AIn the statement of Newton’s third law, “action” and “reaction” are the two opposite forces; we sometimes refer to them as an action–reaction pair. This is not meant to imply any cause-and-effect relation-ship; we can consider either force as the “action” and the other as the “reaction.” We often say simply that the forces are “equal and opposite,” meaning that they have equal magnitudes and opposite directions. the two forces in an action–reaction pair act on different bodies We stress that the two forces described in Newton’s third law act on different bodies. The action and reaction forces are contact forces that are present only when the two bodies are touching. But Newton’s third law also applies to long-range forces that do not require physical contact, such as the force of gravitational attraction. A table-tennis ball exerts an upward gravitational force on the earth that’s equal in magnitude to the downward gravitational force the earth exerts on the ball. When you drop the ball, both the ball and the earth accelerate toward each other. The net force on each body has the same magnitude, but the earth’s acceleration is microscopically small because its mass is so great. Nevertheless, it does move. Q 7) What do you mean by equipotential surface? Also discuss need of equipotential surface?A 7)EQUIPOTENTIAL SURFACES We already studied about Electric field lines help us to understand electric fields, because they give us a "visual" representation of an Electric field. Each of those lines represents the "direction" of the electric field, because the electric field (vector) is tangent to each point of those lines.In a similar way, the potential at points inside of an electric field can be represented "graphically" using equipotential surfaces.An Equipotential surface is a surface where the potential is the same (equal) for any point on top of that surface. In an area where an electric field exists we can construct an equipotential surface that passes through any point. In the diagrams we only show some equipotential lines, mostly with the same potential difference between neighbouring surfaces. And lasty, no point can have two or more different potentials and so equipotential lines can never be tangent and can never intersect.
Figure 15: Equipotential surface NEED OF EQUIPOTENTIAL SURFACES When moving "along" an equipotential surface the potential is the same for any point where a test charge passes by. Which means that the electric field E doesn't produce Work to the test charge on top of an equipotential surface. More specifically the electric field E can't have a vector component tangent to that surface, so that this component can produce Work to the motion of the moving charge on top of the surface. So, the electric field is vertically across to any point of the equipotential surface and to the equipotential surface as a whole. Something which gets us to the conclusion that Electric field lines and Equipotential surfaces are always vertically across to each other.Generally, electric field lines are curved lines and equipotential surfaces are curved surfaces. In the special case of a uniform field where the electric field lines are parallel to each other, the equipotential surfaces are parallel surfaces vertically across to the electric field's lines.
Figure 16: Cross Sections of equipotential surfaces (blue lines) and electric field lines (red lines) for assemblies of point charges. There are equal potentials differences between adjacent surfaces. When the charges inside of a conductor are not moving (are at "rest") then the electric field directly outside of the conductor must be vertically across to every point on top of it's surface. Of course the electric field E = 0 in every point inside of the conductor (electrostatics), cause else the charges would be moving. This means that the component of E that is tangent to the surface, inside of the conductor, is zero at every point. Therefore the tangent component of E directly outside of the conductor is also zero. If that was not true then we would violate the laws of electrostatics. And so, the electric field is vertically across to every point of the conductor's surface. As a result, a conductive surface is always an equipotential surface. When the charges inside of a conductor are not moving (are at "rest") then the electric field directly outside of the conductor must be vertically across to every point on top of it's surface. Of course the electric field E = 0 in every point inside of the conductor (electrostatics), cause else the charges would be moving. This means that the component of E that is tangent to the surface, inside of the conductor, is zero at every point. Therefore the tangent component of E directly outside of the conductor is also zero. If that was not true then we would violate the laws of electrostatics. And so, the electric field is vertically across to every point of the conductor's surface. As a result an conductive surface is always an equipotential surface.So we concluded that any surface over which the potential is constant is called an equipotential surface. In other words, the potential difference between any two points on an equipotential surface is zero. No work is required to move a charge from one point to another on the equipotential surface. In other words, any surface with the same electric potential at every point is termed as an equipotential surface. Q 8) Discuss important properties of equipotential surfaces?A 8)Work done in moving a charge over an equipotential surface is zero. The electric field is always perpendicular to an equipotential surface. The spacing between equipotential surfaces enables us to identify regions of strong and weak fields. Two equipotential surfaces can never intersect. If two equipotential surfaces could intersect, then at the point of intersection there would be two values of electric potential which is not possible. For a point charge, the equipotential surfaces are concentric spherical shells. For a uniform electric field, the equipotential surfaces are planes normal to the x-axis The direction of the equipotential surface is from high potential to low potential. Inside a hollow charged spherical conductor the potential is constant. This can be treated as equipotential volume. No work is required to move a charge from the centre to the surface. For an isolated point charge, the equipotential surface is a sphere. i.e. concentric spheres around the point charge are different equipotential surfaces. In a uniform electric field, any plane normal to the field direction is an equipotential surface. The spacing between equipotential surfaces enables us to identify regions of a strong and weak field i.e. E= −dV/dr ⇒ E ∝ 1/dr
Figure 17: Spacing between equipotential surfaces Q 9) What do you meant by gradient? Discuss its physical significance?A 9)The gradient is a fancy word for derivative, or the rate of change of a function. It’s a vector (a direction to move) thatPoints in the direction of greatest increase of a function Is zero at a local maximum or local minimum (because there is no single direction of increase) The term "gradient" is typically used for functions with several inputs and a single output (a scalar field). Yes, you can say a line has a gradient (its slope), but using "gradient" for single-variable functions is unnecessarily confusing. Keep it simple.“Gradient” can refer to gradual changes of colour, but we’ll stick to the math definition. You’ll see the meanings are related.PROPERTIES OF THE GRADIENTNow that we know the gradient is the derivative of a multi-variable function, let’s derive some properties.The regular, plain-old derivative gives us the rate of change of a single variable, usually x. For example, dF/dx tells us how much the function F changes for a change in x. But if a function takes multiple variables, such as x and y, it will have multiple derivatives: the value of the function will change when we “wiggle” x (dF/dx) and when we wiggle y (dF/dy).We can represent these multiple rates of change in a vector, with one component for each derivative. Thus, a function that takes 3 variables will have a gradient with 3 components:F(x) has one variable and a single derivative: dF/dx F(x,y,z) has three variables and three derivatives: (dF/dx, dF/dy, dF/dz) The gradient of a multi-variable function has a component for each direction.And just like the regular derivative, the gradient points in the direction of greatest increase. However, now that we have multiple directions to consider (x, y and z), the direction of greatest increase is no longer simply “forward” or “backward” along the x-axis, like it is with functions of a single variable.If we have two variables, then our 2-component gradient can specify any direction on a plane. Likewise, with 3 variables, the gradient can specify and direction in 3D space to move to increase our function.Gradient tells you how much something changes as you move from one point to another (such as the pressure in a stream). The gradient is the multidimensional rate of change of a particular function. The gradient vector is a representative of such vectors which present the value of differentiation in all the 360° direction for the given point on the curve”The gradient is a vector function which operates on a scalar function to produce a vector whose scale is the maximum rate of change of the function at the point of the gradient and which is pointed in the direction of that utmost rate of change. The symbol for the gradient is ∇.
Figure 18: Gradient(i) A gradient of a scalar quantity is a Vector quantity.(ii) The magnitude of that vector quantity is equal to the Maximum rate of change of that scalar quantity.(iii) Change of scalar quantity does not depend only on the coordinate of the point, but also on the direction along which the change is shown.For the gradient of a vector field, you can think of it as the gradient of each component of that vector field individually, each of which is a scalar. The gradient always points in the direction of the maximum rate of change in a field.PHYSICAL SIGNIFICANCE OF GRADIENTA scalar field may be represented by a series of level surfaces each having a stable value of scalar point function θ. The θ changes by a stable value as we move from one surface to another. These surfaces are known as Gaussian surfaces. Now let the two such surfaces are very close together, be represented by two scalar point functions and (θ + d θ). Let ‘r’ and (r + d θ) be the position vectors of points A and B, on the surfaces θ and (θ + d θ) correspondingly with respect to an origin 0 as shown in Figure 19. Clearly, the vector AB will be dr. Let the least detachment between the two surfaces ‘dn’ be in the direction of unit usual vector n at A.
Figure 19: Physical significance of gradientdn = dr cos θ= | n | dr | cos θ =n .drDϕ = ∂ϕ/ dn =∂ϕ/dn n .dr…… (1)Since the continuous scalar function defining the level surfaces (Gaussian surfaces) has a value θ at point A (x, y, z) and (θ + dθ) at point (x + dx, y + dy, z + dz), we havedϕ = ∂ ϕ/dx dx +dϕ/∂y + ∂ϕ/∂x dz= (I ∂ϕ/∂x +j ∂ϕ/vy +k ∂ϕ/∂z) .(idx +jdy +kdz)= ∆ ϕ. dr … … (2)From equations (1) and (2), equating the values of d θ,We obtain ∆θ .dr =∆ ϕ= ∂ϕ/ ∂n n .drAs dr is an arbitrary vector, we have∆ϕ =∂ϕ/∂ nGrad ϕ = ∂ ϕ/∂n nTherefore, the gradient an of a scalar field at any point is a vector field, the scale of which is equal to the highest rate of increase of θ at that point and the direction of it is similar as that of usual to the level surface at that point.Its physical significance of grad can be understand in terms of the graph of some function z = f(x, y), where f is a reasonable function – say with continuous first partial derivatives. In this case we can think of the graph as a surface whose points have variable heights over the xy – plane. An illustration is given below.
Figure 20: Graph of a surface whose points have variable heights over the xy – plane.If, say, we place a marble at some point (x, y) on this graph with zero initial force, its motion will trace out a path on the surface, and in fact it will choose the direction of steepest descent. This direction of steepest descent is given by the negative of the gradient of f. One takes the negative direction because the height is decreasing rather than increasing.Using the language of vector fields, we may restate this as follows: For the given function f(x, y), gravitational force defines a vector field F over the corresponding surface z = f(x, y), and the initial velocity of an object at a point (x, y) is given mathematically by –∇f(x, y). The gradient also describes directions of maximum change in other contexts. For example, if we think off as describing the temperature at a point(x, y), then the gradient gives the direction in which the temperature is increasing most rapidly. Q 10) What are conservative and non-conservative forces?A 10)A conservative force may be defined as one for which the work done in moving between two points A and B is independent of the path taken between the two points. The implication of "conservative" in this context is that you could move it from A to B by one path and return to A by another path with no net loss of energy - any closed return path to A takes net zero work. A further implication is that the energy of an object which is subject only to that conservative force is dependent upon its position and not upon the path by which it reached that position. This makes it possible to define a potential energy function which depends upon position only.A conservative force is a force that does zero work done in a closed path. If only these forces act then the mechanical energy of the system remains conserved. Examples of conservative force: Gravitational force, spring force etc.On the other hand, non-conservative forces are those forces which cause loss of mechanical energy from the system. In the above case friction is the non-conservative force. But as we know energy can neither be created nor destroyed hence these forces convert mechanical energy into heat, sound, light etc.Now, Conservative force has one more property that works done by it is independent of the path taken.Forces are either conservative or non-conservative. Conservative forces we already discussed. A non-conservative force is one for which work depends on the path taken. Friction is a good example of a non-conservative force. As illustrated in Figure 21,
Figure 21: Conservative and Non-Conservative ForcesWork done against friction depends on the length of the path between the starting and ending points. Because of this dependence on path, there is no potential energy associated with non-conservative forces. An important characteristic is that the work done by a non-conservative force adds or removes mechanical energy from a system. Friction, for example, creates thermal energy that dissipates, removing energy from the system. Furthermore, even if the thermal energy is retained or captured, it cannot be fully converted back to work, so it is lost or not recoverable in that sense as well.In Figure 21. The amount of the happy face erased depends on the path taken by the eraser between points A and B, as does the work done against friction. Less work is done and less of the face is erased for the path in (a) than for the path in (b). The force here is friction, and most of the work goes into thermal energy that subsequently leaves the system (the happy face plus the eraser). The energy expended cannot be fully recovered. Q 11) Calculate the Distance Travelled by 65.0-kg baseball player slides, given that his initial speed is 6.00 m/s and the force of friction against him is a constant 450 N ? The situation shown in Figure. What do you observe from result?
Figure : Baseball player slides A 11)The baseball player slides to a stop in a distance d. In the process, friction removes the player’s kinetic energy by doing an amount of work equal to the initial kinetic energy.Friction stops the player by converting his kinetic energy into other forms, including thermal energy. the work done by friction, which is negative, is added to the initial kinetic energy to reduce it to zero. The work done by friction is negative, because f is in the opposite direction of the motion (that is, θ = 180º, and so cos θ = −1). Thus Wnc = −fd. The equation simplifies to mvi2−fd=0orfd=
mvi2−fd=0orfd=  mvi2.Solving the previous equation for d and substituting known values yieldsd=
mvi2.Solving the previous equation for d and substituting known values yieldsd=  ==
==  d =
d = =2.60 mThe most important point of this example is that the amount of non-conservative work equals the change in mechanical energy. For example, you must work harder to stop a truck, with its large mechanical energy, than to stop a mosquito. Q 12) Explain Central Forces and Derive equations of motion for a particle in a central force field?A 12)Suppose that force acting on a particle of mass m has the properties that:•the force is always directed from m toward, or away, from a fixed point O,•the magnitude of the force only depends on the distance r from OForces having these properties are called central forces. The particle is said to move in a central force field.
=2.60 mThe most important point of this example is that the amount of non-conservative work equals the change in mechanical energy. For example, you must work harder to stop a truck, with its large mechanical energy, than to stop a mosquito. Q 12) Explain Central Forces and Derive equations of motion for a particle in a central force field?A 12)Suppose that force acting on a particle of mass m has the properties that:•the force is always directed from m toward, or away, from a fixed point O,•the magnitude of the force only depends on the distance r from OForces having these properties are called central forces. The particle is said to move in a central force field.
Figure 26: Central ForcesMathematically, F is a central force if and only if: F=f(r)r1= f(r)  ………..(1)Where r1=
………..(1)Where r1=  is a unit vector in the direction of r.If f(r) <0 the force is said to be attractive towards O. If f(r)>0 the force is said to be repulsive from O.For example, the gravitational force of attraction between two point masses is a central force. The Coulomb force of attraction and repulsion between charged particles is a central force.Properties of a Particle Moving under the Influence of a Central ForceIf a particle moves in a central force field then the following properties hold:1. The path of the particle must be a plane curve, i.e., it must lie in a plane.2. The angular momentum of the particle is conserved, i.e., it is constant in time.3. The particle moves in such a way that the position vector (from the point O) sweeps out equal areas in equal times. In other words, the time rate of change in area is constant. This is referred to as the Law of Areas. Equations of Motion for a Particle in a Central Force FieldNow we will derive the basic equations of motion for a particle moving in a central force field. From Property 1 above, the motion of the particle must occur in a plane, which we take as the xy plane and the center of force is taken as the origin. In Fig. 2 we show the xy plane, as well as the polar coordinate system in the plane.
is a unit vector in the direction of r.If f(r) <0 the force is said to be attractive towards O. If f(r)>0 the force is said to be repulsive from O.For example, the gravitational force of attraction between two point masses is a central force. The Coulomb force of attraction and repulsion between charged particles is a central force.Properties of a Particle Moving under the Influence of a Central ForceIf a particle moves in a central force field then the following properties hold:1. The path of the particle must be a plane curve, i.e., it must lie in a plane.2. The angular momentum of the particle is conserved, i.e., it is constant in time.3. The particle moves in such a way that the position vector (from the point O) sweeps out equal areas in equal times. In other words, the time rate of change in area is constant. This is referred to as the Law of Areas. Equations of Motion for a Particle in a Central Force FieldNow we will derive the basic equations of motion for a particle moving in a central force field. From Property 1 above, the motion of the particle must occur in a plane, which we take as the xy plane and the center of force is taken as the origin. In Fig. 2 we show the xy plane, as well as the polar coordinate system in the plane.
Figure 27: Polar coordinate system associated with a particle moving in the xy plane. Since the vectorial nature of the central force is expressed in terms of a radial vector from the origin it is most natural (though not required!) to write the equations of motion in polar coordinates. In earlier lectures we derived the expression for the acceleration of a particle in polar coordinates: ………..(2)Then, using Newton’s second law, and the mathematical form for the central force given in (1), we have:
………..(2)Then, using Newton’s second law, and the mathematical form for the central force given in (1), we have: ………..(3)
………..(3) ………..(4)
………..(4) ………..(5)These are the basic equations of motion for a particle in a central force field. They will be the starting point for many of our investigations. From these equations we can derive a useful constant of the motion. This is done as follows. From (5) we have:
………..(5)These are the basic equations of motion for a particle in a central force field. They will be the starting point for many of our investigations. From these equations we can derive a useful constant of the motion. This is done as follows. From (5) we have:
 ……….. (6)This is an interesting relation that, we will see, is related to properties 2 and 3 above. However, one use for it should be apparent. If you know the r component of the motion it allows you to compute the θ component by integration. This is another example of how constants of the motion allow us to “integrate” the equations of motion. It also explains why constants of the motion are often referred to as integrals of the motion. Now, let us return to property 3 above and derive the Law of AreasSuppose that in time ∆t the position vector moves from r to r+∆r. Then the area swept out by the position vector in this time is approximately half the area of a parallelogram with sides r and ∆r. We give a proof of this: Area of parallelogram = height×|r|,=|∆r|sinθ|r|,=|r×∆r|,
……….. (6)This is an interesting relation that, we will see, is related to properties 2 and 3 above. However, one use for it should be apparent. If you know the r component of the motion it allows you to compute the θ component by integration. This is another example of how constants of the motion allow us to “integrate” the equations of motion. It also explains why constants of the motion are often referred to as integrals of the motion. Now, let us return to property 3 above and derive the Law of AreasSuppose that in time ∆t the position vector moves from r to r+∆r. Then the area swept out by the position vector in this time is approximately half the area of a parallelogram with sides r and ∆r. We give a proof of this: Area of parallelogram = height×|r|,=|∆r|sinθ|r|,=|r×∆r|,
Alternative Forms to the Basic Equations of Motion for a Particle in a Central Force Field Recall the basic equations of motion as they will be our starting point: ……….. (8)
……….. (8) ……….. (9)We derived the following constant of the motion:
……….. (9)We derived the following constant of the motion: ……….. (10)This constant of the motion will allow you to determine the θ component of motion, provided you know the r component of motion. However, (8) and (9) are coupled (nonlinear) equations for the r and θ components of the motion. How could you solve them without solving for both the r and θ components? This is where alternative forms of the equations of motion are useful. Let us rewrite (8) in the following form (by dividing through by the mass m):
……….. (10)This constant of the motion will allow you to determine the θ component of motion, provided you know the r component of motion. However, (8) and (9) are coupled (nonlinear) equations for the r and θ components of the motion. How could you solve them without solving for both the r and θ components? This is where alternative forms of the equations of motion are useful. Let us rewrite (8) in the following form (by dividing through by the mass m): ……….. (11)Now, using (10), (11) can be written entirely in terms of r:
……….. (11)Now, using (10), (11) can be written entirely in terms of r: ……….. (12)We can use (12) to solve for r(t), and the use (10) to solve for θ(t).Equation (12) is a non-linear differential equation. There is a useful change of variables, which for certain important central forces, turns the equation into a linear differential equation with constant coefficients and these can always be solved analytically. Here we describe this coordinate transformation. Let r =
……….. (12)We can use (12) to solve for r(t), and the use (10) to solve for θ(t).Equation (12) is a non-linear differential equation. There is a useful change of variables, which for certain important central forces, turns the equation into a linear differential equation with constant coefficients and these can always be solved analytically. Here we describe this coordinate transformation. Let r =  This is part of the coordinate transformation. We will also use θ as a new “time” variable. Coordinate transformation are effected by the chain rule, since this allows us to express derivatives of “old” coordinates in terms of the “new” coordinates. We have:
This is part of the coordinate transformation. We will also use θ as a new “time” variable. Coordinate transformation are effected by the chain rule, since this allows us to express derivatives of “old” coordinates in terms of the “new” coordinates. We have:
Q 13) Determine whether or not the following Forces are conservative?(a) F= 3z2i+ cosyj+ 2xzk(b) F=ycosxyi+xcosxyj−sinzkA 13) (a) F= 3z2i+ cosyj+ 2xzkFor the conservative force the curl of that force must be equal to zero =0Let us check
=0Let us check
 = 0i+ 4zj+ 0k
= 0i+ 4zj+ 0k  0 and therefore F is not conservative.(b) F=ycosxyi+xcosxyj−sinzk
0 and therefore F is not conservative.(b) F=ycosxyi+xcosxyj−sinzk
 =0Therefore F is conservative.
=0Therefore F is conservative.
= - In the SI system, the unit of charge is the coulomb, abbreviated C. (The coulomb is defined in terms of electric currents and magnetic forces.) In this system, k is found by experiment to bek = 8.99 x 109 N·m2/C2 2. Gravitational ForceThis force is the weakest but has an infinite range. It has strength of 6 × 10-39 in comparison to the strength of the strong force. This force is always attractive acts between any two pieces of matter in nature. The effect of this gravitational force is dependent upon the mass of the two bodies and the distance between them. Gravity is an attractive force between masses, which according to general relativity occurs as a result of the effect of energy acting on a space-time field. While theory suggests it could have a mediating particle - called a graviton - experiments are yet to support its existence. While gravity might appear to be a strong force, responsible for holding entire galaxies together and squeezing the literal daylight out of stars, it's approximately 1029 times weaker than the weak nuclear force. That means it has virtually no observable effect on the scale of tiny particles, becoming relevant only on a more cosmic level.Consider two particles, a and b, with masses Ma and Mb, respectively, separated by distance r. Let Fb be the force exerted on particle b by particle a.
|
 = G is a constant of proportionality called the gravitational constant. Its value is found by measuring the force between masses in a known geometry. The first measurements were performed by Henry Cavendish in 1771 using a torsion balance. The modern value of G is 6.67 X 10-11 N·m2/kg2. (G is the least accurately known of the fundamental constants. Perhaps you can devise a new way to measure it more precisely.) Experimentally, G is the same for all materials-aluminum, lead, neutrons, or what have you. For this reason, the law is called the universal law of gravitation.3. Strong Nuclear Force The strong nuclear force is what holds together the nuclei of atoms. This force holds the nucleus of an atom together. It is the strongest of the forces, but it is very short ranged. It acts over a range of about 10-15m, which is the average diameter of a medium sized nucleus. This force is attractive.The protons and neutrons making up an atom's nucleus are themselves made up of a trio of simpler particles called quarks. A particle called a gluon acts on a property of quarks called colour, creating the force's pull. Unlike the other three fundamental forces, the further the gluon needs to travel, the stronger the nuclear force gets. On the scale of protons and neutrons, this spring-like effect makes it incredibly hard to pull quarks apart. This helps explain why the strong force is so, well, strong.On a scale of an atom's entire nucleus, the force also binds whole protons and neutrons to each other. Protons also push each other away thanks to the electromagnetic force, putting atomic nuclei into a delicate balance.4. Weak Nuclear ForceThis force is weak compared to the strong force as the name implies and has the shortest range of 10-18m, which is 0.1% of the diameter of a proton. It is responsible for radioactive decay especially nuclear beta decay. All particles experience this force. Of all the fundamental forces, the weak nuclear force is the trickiest to grasp. It describes how the quarks that make up nuclear particles can change from one form into another. The force is carried by particles called W and Z bosons.The weak force acts over an incredibly short distance, equal to about 0.1 percent of the diameter of a proton. When a particle such as a neutrino comes right up close to a quark, the weak force causes the quark to change by sending out a W boson. This can turn a neutron into a proton (creating a whole new element in the process), and the neutrino into an electron.So We have studied that every pair of particles in the universe had its own special interaction, the task would be impossible. Fortunately, nature is kinder than this. As far as we know, there are only four fundamentally different types of interactions in the universe: gravity, electromagnetic interactions, the so-called weak interaction, and the strong interaction. Gravity and the electromagnetic interactions can act over a long range because they decrease only as the inverse square of the distance. However, the gravitational force always attracts, whereas electrical forces can either attract or repel. In large systems, electrical attraction and repulsion cancel to a high degree, and gravity alone is left. For this reason, gravitational forces dominate the cosmic scale of our universe. In contrast, the world immediately around us is dominated by the electrical forces, since they are far stronger than gravity on the atomic scale. Electrical forces are responsible for the structure of atoms, molecules, and more complex forms of matter, as well as the existence of light. The weak and strong interactions have such short ranges that they are important only at nuclear distances, typically 10-16 m. They are negligible even at atomic distances, 10-10 m. As its name implies, the strong interaction is very strong, much stronger than the electromagnetic force at nuclear distances. It is the "glue" that binds the atomic nucleus, but aside from this it has little effect in the everyday world. The weak interaction plays a less dramatic role; it mediates in the creation and destruction of neutrinos-particles of no mass and no charge which are essential to our understanding of matter but which can be detected only by the most arduous experiments. Our object in the remainder of the chapter is to become familiar with the forces which are important in everyday mechanics. Two of these, the forces of gravity and electricity, are fundamental and cannot be explained in simpler terms. The other forces we shall discuss, friction, the contact force, and the viscous force, can be understood as the macroscopic manifestation of interatomic forces. Q 2) Discuss the transformation of scalars and vectors under rotation transformation? A 2)Certain physical quantities such as mass or the absolute temperature at some point in space only have magnitude. A single number can represent each of these quantities, with appropriate units, which are called scalar quantities. There are, however, other physical quantities that have both magnitude and direction. Force is an example of a quantity that has both direction and magnitude (strength). Three numbers are needed to represent the magnitude and direction of a vector quantity in a three dimensional space. These quantities are called vector quantities. Vector quantities also satisfy two distinct operations, vector addition and multiplication of a vector by a scalar. We can add two forces together and the sum of the forces must satisfy the rule for vector addition. We can multiply a force by a scalar thus increasing or decreasing its strength. Position, displacement, velocity, acceleration, force, and momentum are all physical quantities that can be represented mathematically by vectors. The set of vectors and the two operations form what is called a vector space. There are many types of vector spaces but we shall restrict our attention to the very familiar type of vector space in three dimensions that most students have encountered in their mathematical courses. Vectors are sets of three quantities that transform in the same manner as the coordinates of a point P.
= G is a constant of proportionality called the gravitational constant. Its value is found by measuring the force between masses in a known geometry. The first measurements were performed by Henry Cavendish in 1771 using a torsion balance. The modern value of G is 6.67 X 10-11 N·m2/kg2. (G is the least accurately known of the fundamental constants. Perhaps you can devise a new way to measure it more precisely.) Experimentally, G is the same for all materials-aluminum, lead, neutrons, or what have you. For this reason, the law is called the universal law of gravitation.3. Strong Nuclear Force The strong nuclear force is what holds together the nuclei of atoms. This force holds the nucleus of an atom together. It is the strongest of the forces, but it is very short ranged. It acts over a range of about 10-15m, which is the average diameter of a medium sized nucleus. This force is attractive.The protons and neutrons making up an atom's nucleus are themselves made up of a trio of simpler particles called quarks. A particle called a gluon acts on a property of quarks called colour, creating the force's pull. Unlike the other three fundamental forces, the further the gluon needs to travel, the stronger the nuclear force gets. On the scale of protons and neutrons, this spring-like effect makes it incredibly hard to pull quarks apart. This helps explain why the strong force is so, well, strong.On a scale of an atom's entire nucleus, the force also binds whole protons and neutrons to each other. Protons also push each other away thanks to the electromagnetic force, putting atomic nuclei into a delicate balance.4. Weak Nuclear ForceThis force is weak compared to the strong force as the name implies and has the shortest range of 10-18m, which is 0.1% of the diameter of a proton. It is responsible for radioactive decay especially nuclear beta decay. All particles experience this force. Of all the fundamental forces, the weak nuclear force is the trickiest to grasp. It describes how the quarks that make up nuclear particles can change from one form into another. The force is carried by particles called W and Z bosons.The weak force acts over an incredibly short distance, equal to about 0.1 percent of the diameter of a proton. When a particle such as a neutrino comes right up close to a quark, the weak force causes the quark to change by sending out a W boson. This can turn a neutron into a proton (creating a whole new element in the process), and the neutrino into an electron.So We have studied that every pair of particles in the universe had its own special interaction, the task would be impossible. Fortunately, nature is kinder than this. As far as we know, there are only four fundamentally different types of interactions in the universe: gravity, electromagnetic interactions, the so-called weak interaction, and the strong interaction. Gravity and the electromagnetic interactions can act over a long range because they decrease only as the inverse square of the distance. However, the gravitational force always attracts, whereas electrical forces can either attract or repel. In large systems, electrical attraction and repulsion cancel to a high degree, and gravity alone is left. For this reason, gravitational forces dominate the cosmic scale of our universe. In contrast, the world immediately around us is dominated by the electrical forces, since they are far stronger than gravity on the atomic scale. Electrical forces are responsible for the structure of atoms, molecules, and more complex forms of matter, as well as the existence of light. The weak and strong interactions have such short ranges that they are important only at nuclear distances, typically 10-16 m. They are negligible even at atomic distances, 10-10 m. As its name implies, the strong interaction is very strong, much stronger than the electromagnetic force at nuclear distances. It is the "glue" that binds the atomic nucleus, but aside from this it has little effect in the everyday world. The weak interaction plays a less dramatic role; it mediates in the creation and destruction of neutrinos-particles of no mass and no charge which are essential to our understanding of matter but which can be detected only by the most arduous experiments. Our object in the remainder of the chapter is to become familiar with the forces which are important in everyday mechanics. Two of these, the forces of gravity and electricity, are fundamental and cannot be explained in simpler terms. The other forces we shall discuss, friction, the contact force, and the viscous force, can be understood as the macroscopic manifestation of interatomic forces. Q 2) Discuss the transformation of scalars and vectors under rotation transformation? A 2)Certain physical quantities such as mass or the absolute temperature at some point in space only have magnitude. A single number can represent each of these quantities, with appropriate units, which are called scalar quantities. There are, however, other physical quantities that have both magnitude and direction. Force is an example of a quantity that has both direction and magnitude (strength). Three numbers are needed to represent the magnitude and direction of a vector quantity in a three dimensional space. These quantities are called vector quantities. Vector quantities also satisfy two distinct operations, vector addition and multiplication of a vector by a scalar. We can add two forces together and the sum of the forces must satisfy the rule for vector addition. We can multiply a force by a scalar thus increasing or decreasing its strength. Position, displacement, velocity, acceleration, force, and momentum are all physical quantities that can be represented mathematically by vectors. The set of vectors and the two operations form what is called a vector space. There are many types of vector spaces but we shall restrict our attention to the very familiar type of vector space in three dimensions that most students have encountered in their mathematical courses. Vectors are sets of three quantities that transform in the same manner as the coordinates of a point P.
|
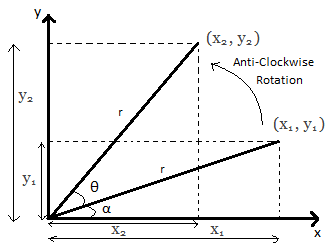 = …………(7)is called the rotation matrix. Its determinant is 1.To find the clockwise rotation matrix, you can do the calculations again. OR you can just transpose the above matrix OR you can substitute −θ into the matrix. Hence, the clockwise rotation matrix is: Note: Since clockwise rotation means rotating in the anti-clockwise direction by −θ, you can just substitute −θ into the anti-clockwise matrix to get the clockwise matrix. Since cos is an even function, it will not be affected by the −θ. (- cos x = cos x) Rotation of coordinate axes:
= …………(7)is called the rotation matrix. Its determinant is 1.To find the clockwise rotation matrix, you can do the calculations again. OR you can just transpose the above matrix OR you can substitute −θ into the matrix. Hence, the clockwise rotation matrix is: Note: Since clockwise rotation means rotating in the anti-clockwise direction by −θ, you can just substitute −θ into the anti-clockwise matrix to get the clockwise matrix. Since cos is an even function, it will not be affected by the −θ. (- cos x = cos x) Rotation of coordinate axes:
|
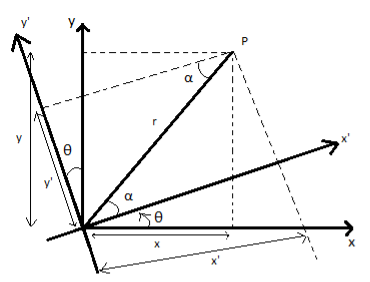 …………(14)y′= …………(15)Substitute the above (14) and (15) equations into equation (12) and you will get:y′=−xsinθ+ycosθx′=xcosθ+ysinθHence,= …………(16) …………(17) Q 3) State Newton’s first law of motion? Discuss it by giving some example? A 3)NEWTON’S FIRST LAWHow do the forces that act on a body affect its motion? To begin to answer this question, let’s first consider what happens when the net force on a body is zero. You would almost certainly agree that if a body is at rest, and if no net force acts on it (that is, no net push or pull), that body will remain at rest. But what if there is zero net force acting on a body in motion? To see what happens in this case, suppose you slide a hockey puck along a horizontal table top, applying a horizontal force to it with your hand (Figure 4).
…………(14)y′= …………(15)Substitute the above (14) and (15) equations into equation (12) and you will get:y′=−xsinθ+ycosθx′=xcosθ+ysinθHence,= …………(16) …………(17) Q 3) State Newton’s first law of motion? Discuss it by giving some example? A 3)NEWTON’S FIRST LAWHow do the forces that act on a body affect its motion? To begin to answer this question, let’s first consider what happens when the net force on a body is zero. You would almost certainly agree that if a body is at rest, and if no net force acts on it (that is, no net push or pull), that body will remain at rest. But what if there is zero net force acting on a body in motion? To see what happens in this case, suppose you slide a hockey puck along a horizontal table top, applying a horizontal force to it with your hand (Figure 4).
|
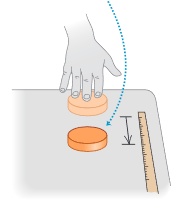
|
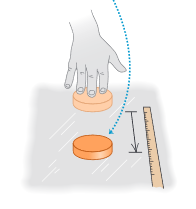
|
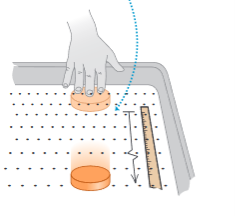
|
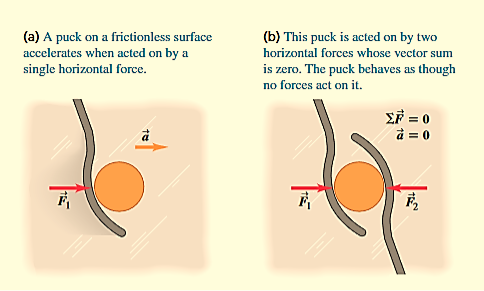 . (b) When the net force is zero, the acceleration is zero, and the puck is in equilibrium.If the puck is initially at rest and a single horizontal force acts on it (Figure 7a), the puck starts to move. If the puck is in motion to begin with, the force changes its speed, its direction, or both, depending on the direction of the force. In this case the net force is equal to which is not zero. (There are also two vertical forces: the earth’s gravitational attraction and the upward normal force exerted by the surface. But as we mentioned earlier, these two forces cancel.)Now suppose we apply a second force, (Figure 7b), equal in magnitude to but opposite in direction. The two forces are negatives of each other, ,and their vector sum is zero Again, we find that if the body is at rest at the start, it remains at rest; if it is initially moving, it continues to move in the same direction with constant speed. These results show that in Newton’s first law, zero net force is equivalent to no force at all. This is just the principle of superposition of forces. When a body is either at rest or moving with constant velocity (in a straight line with constant speed), we say that the body is in equilibrium. For a body to be in equilibrium, it must be acted on by no forces, or by several forces such that their vector sum that is, the net force is zero.Q4) State Newton’s second law of motion? Discuss it by giving some example? A 4)NEWTON’S SECOND LAWNewton’s first law tells us that when a body is acted on by zero net force, the body moves with constant velocity and zero acceleration. In Figure 8(a), a hockey puck is sliding to the right on wet ice. There is negligible friction, so there are no horizontal forces acting on the puck; the downward force of gravity and the upward normal force exerted by the ice surface sum to zero. So the net force acting on the puck is zero, the puck has zero acceleration, and its velocity is constant.But what happens when the net force is not zero? In Figure 8 (b) we apply a constant horizontal force to a sliding puck in the same direction that the puck is moving. Then is constant and in the same horizontal direction as . We find that during the time the force is acting, the velocity of the puck changes at a constant rate; that is, the puck moves with constant acceleration. The speed of the puck increases, so the acceleration is in the same direction as and .In Figure 8(c) we reverse the direction of the force on the puck so that acts opposite to . In this case as well, the puck has acceleration; the puck moves more and more slowly to the right. The acceleration in this case is to the left, in the same direction as. As in the previous case, experiment shows that the acceleration is constant if is constant. We conclude that net force acting on a body causes the body to accelerate in the same direction as the net force. If the magnitude of the net force is constant, as in Figures 8(b) and 8(c), then so is the magnitude of the acceleration.
. (b) When the net force is zero, the acceleration is zero, and the puck is in equilibrium.If the puck is initially at rest and a single horizontal force acts on it (Figure 7a), the puck starts to move. If the puck is in motion to begin with, the force changes its speed, its direction, or both, depending on the direction of the force. In this case the net force is equal to which is not zero. (There are also two vertical forces: the earth’s gravitational attraction and the upward normal force exerted by the surface. But as we mentioned earlier, these two forces cancel.)Now suppose we apply a second force, (Figure 7b), equal in magnitude to but opposite in direction. The two forces are negatives of each other, ,and their vector sum is zero Again, we find that if the body is at rest at the start, it remains at rest; if it is initially moving, it continues to move in the same direction with constant speed. These results show that in Newton’s first law, zero net force is equivalent to no force at all. This is just the principle of superposition of forces. When a body is either at rest or moving with constant velocity (in a straight line with constant speed), we say that the body is in equilibrium. For a body to be in equilibrium, it must be acted on by no forces, or by several forces such that their vector sum that is, the net force is zero.Q4) State Newton’s second law of motion? Discuss it by giving some example? A 4)NEWTON’S SECOND LAWNewton’s first law tells us that when a body is acted on by zero net force, the body moves with constant velocity and zero acceleration. In Figure 8(a), a hockey puck is sliding to the right on wet ice. There is negligible friction, so there are no horizontal forces acting on the puck; the downward force of gravity and the upward normal force exerted by the ice surface sum to zero. So the net force acting on the puck is zero, the puck has zero acceleration, and its velocity is constant.But what happens when the net force is not zero? In Figure 8 (b) we apply a constant horizontal force to a sliding puck in the same direction that the puck is moving. Then is constant and in the same horizontal direction as . We find that during the time the force is acting, the velocity of the puck changes at a constant rate; that is, the puck moves with constant acceleration. The speed of the puck increases, so the acceleration is in the same direction as and .In Figure 8(c) we reverse the direction of the force on the puck so that acts opposite to . In this case as well, the puck has acceleration; the puck moves more and more slowly to the right. The acceleration in this case is to the left, in the same direction as. As in the previous case, experiment shows that the acceleration is constant if is constant. We conclude that net force acting on a body causes the body to accelerate in the same direction as the net force. If the magnitude of the net force is constant, as in Figures 8(b) and 8(c), then so is the magnitude of the acceleration.
|
 on a body and the resulting acceleration of the body.Our results mean that for a given body, the ratio of the magnitude of the net force to the magnitude a= of the acceleration is constant, regardless of the magnitude of the net force. We call this ratio the inertial mass, or simply the mass, of the body and denote it by m. That is,m= or =ma or a= Mass is a quantitative measure of inertia. The above equations says that the greater a body’s mass, the more the body “resists” being accelerated. When you hold a piece of fruit in your hand at the supermarket and move it slightly up and down to estimate its heft, you’re applying a force and seeing how much the fruit accelerates up and down in response. If a force causes a large acceleration, the fruit has a small mass; if the same force causes only a small acceleration, the fruit has a large mass. One newton is the amount of net force that gives an acceleration of 1 meter per second squared to a body with a mass of 1 kilogram.For the same net force, the ratio of the masses of two bodies is the inverse of the ratio of their accelerations. = So Newton’s second law States that If a net external force acts on a body, the body accelerates. The direction of acceleration is the same as the direction of the net force. The mass of the body times the acceleration vector of the body equals the net force vector =maNewton’s second law is a fundamental law of nature, the basic relationship be-tween force and motion. The statement of Newton’s second law refers to external forces. It’s impossible for a body to affect its own motion by exerting a force on itself; if it were possible, you could lift yourself to the ceiling by pulling up on your belt. That’s why only external forces are included in the sum . The design of high-performance motorcycles depends fundamentally on Newton’s second law. To maximize the forward acceleration, the designer makes the motorcycle as light as possible (that is, minimizes the mass) and uses the most powerful engine possible (thus maximizing the forward force).Light weight body (small m) Powerful engine (large F)application Blame Newton’s Second Law. The above equations are valid only when the mass m is constant. It ’s easy to think of systems whose masses change, such as a leaking tank truck, a rocket ship, or a moving railroad car being loaded with coal. Such systems are better handled by using the concept of momentum.Finally, Newton’s second law is valid in inertial frames of reference only, just like the first law. Thus it is not valid in the reference frame of any of the accelerating vehicles relative to any of these frames; the passenger accelerates even though the net force on the passenger is zero. We will usually assume that the earth is an adequate approximation to an inertial frame, although because of its rotation and orbital motion it is not precisely inertial.Here is something important to discuss that m is not a force even though the vector m is equal to the vector sum of all the forces acting on the body, the vector m is not a force. Acceleration is a result of a nonzero net force; it is not a force itself. It’s “common sense” to think that there is a “force of acceleration” that pushes you back into your seat when your car accelerates forward from rest. But there is no such force; instead, your inertia causes you to tend to stay at rest relative to the earth, and the car accelerates around you, The “common sense” confusion arises from trying to apply Newton’s second law where it isn’t valid—in the non-inertial reference frame of an accelerating car. We will always examine motion relative to inertial frames of reference only. Q5) Discuss conservation of angular momentum and energy for a particle in a central force field?A 5)ANGULAR MOMENTUMConsider the angular momentum of the reduced mass system L = r × p = r × . How does angular momentum L change with time? We have ……….(1)We use the product rule, which is valid for cross products as long as you don’t change the order of the factors. The second term after cross product is zero since ( × = 0). Recall that r × F which occurs in above expression is called the torque τ. We have shown that in the case of central forces the time derivative of the angular momentum, and hence the torque, are zero. Therefore: ……….(2) i.e. the angular momentum is conserved.The force F (r) depends only on the distance of the reduced mass from the center of mass and not on the orientation of the system in space. Therefore, this system is spherically symmetric; it is invariant (unchanged) under rotations. Noether’s theorem states that whenever the laws of physics are invariant under a particular motion or other operation, there will be a corresponding conserved quantity. In this case, we see that the conservation of angular momentum is related to the invariance of the physical system under rotations. This further can explain as belowAngular momentum: A vector quantity describing an object in circular motion; its magnitude is equal to the momentum of the particle, and the direction is perpendicular to the plane of its circular motion.Angular momentum is the rotational analog of linear momentum, it is denoted by l, and angular momentum of a particle in rotational motion is defined as:l = r × pThis is a cross product of r, i.e. the radius of the circle formed by the body in rotational motion, and p, i.e. the linear momentum of the body, the magnitude of a cross product of two vectors is always the product of their magnitude multiplied with the sine of the angle between them, therefore in the case of angular momentum the magnitude is given by, l = r p sinθThe law of conservation of angular momentum states that when no external torque acts on an object, no change of angular momentum will occur. For this let us derive relation between torque and angular momentumTorque and Angular Momentum RelationshipRelationship between torque and angular momentum can found as follows, = Differentiating LHS and RHS, = By the property of differentiation on cross products the above expression can be written as follows, = + is change in displacement with time, therefore it is linear velocity = + is linear momentum i.e. mass times velocity, = +Now notice the first term, there is × magnitude of cross product is given by × sinθ where the angle is 0 hence the whole term becomes 0.From newton’s 2nd law we know that is force, = We know that r × F is torque, hence = (torque)So rate of change of angular momentum is torque.Now this statement seems clearer to you; The law of conservation of angular momentum states that when no external torque acts on an object, no change of angular momentum will occur. The conserved quantity we are investigating is called angular momentum. The symbol for angular momentum is the letter L. Just as linear momentum is conserved when there is no net external force, angular momentum is constant or conserved when the net torque is zero. For the situation in which the net torque is zero, =0 If the change in angular momentum Δl is zero, then the angular momentum is constant; therefore,=constant(when net τ=0).This is an expression for the law of conservation of angular momentum.CONSERVATION OF ENERGY FOR A PARTICLE IN A CENTRAL FORCE FIELDSince central forces are conservative forces, we know that total energy must be conserved. Now we derive expressions for the total energy of a particle of mass m in a central force field. We will do this in two ways.First MethodFirst we compute the kinetic energy. The velocity is given by:And thereforeThe kinetic energy is given by:Therefore we have: ……….. (18) Q6) State Newton’s third law of motion? Discuss it by giving some example? A 6)NEWTON’S THIRD LAWForce acting on a body is always the result of its interaction with another body, so forces always come in pairs. You can’t pull on a doorknob without the door-knob pulling back on you. When you kick a football, the forward force that your foot exerts on the ball launches it into its trajectory, but you also feel the force the ball exerts back on your foot. In each of these cases, the force that you exert on the other body is in the opposite direction to the force that body exerts on you. Experiments show that whenever two bodies interact, the two forces that they exert on each other are always equal in magnitude and opposite in direction. This fact is called Newton’s third law of motion: If body A exerts a force on body B (an “action”), then body B exerts a force on body A (a “reaction”). These two forces have the same magnitude but are opposite in direction. These two forces act on different bodies.OrTo every action there is equal and opposite reaction.For example, A on B is the force applied by body A (first sub-script) on body B (second subscript), and B on A is the force applied by body B(first subscript) on body A (second subscript).
on a body and the resulting acceleration of the body.Our results mean that for a given body, the ratio of the magnitude of the net force to the magnitude a= of the acceleration is constant, regardless of the magnitude of the net force. We call this ratio the inertial mass, or simply the mass, of the body and denote it by m. That is,m= or =ma or a= Mass is a quantitative measure of inertia. The above equations says that the greater a body’s mass, the more the body “resists” being accelerated. When you hold a piece of fruit in your hand at the supermarket and move it slightly up and down to estimate its heft, you’re applying a force and seeing how much the fruit accelerates up and down in response. If a force causes a large acceleration, the fruit has a small mass; if the same force causes only a small acceleration, the fruit has a large mass. One newton is the amount of net force that gives an acceleration of 1 meter per second squared to a body with a mass of 1 kilogram.For the same net force, the ratio of the masses of two bodies is the inverse of the ratio of their accelerations. = So Newton’s second law States that If a net external force acts on a body, the body accelerates. The direction of acceleration is the same as the direction of the net force. The mass of the body times the acceleration vector of the body equals the net force vector =maNewton’s second law is a fundamental law of nature, the basic relationship be-tween force and motion. The statement of Newton’s second law refers to external forces. It’s impossible for a body to affect its own motion by exerting a force on itself; if it were possible, you could lift yourself to the ceiling by pulling up on your belt. That’s why only external forces are included in the sum . The design of high-performance motorcycles depends fundamentally on Newton’s second law. To maximize the forward acceleration, the designer makes the motorcycle as light as possible (that is, minimizes the mass) and uses the most powerful engine possible (thus maximizing the forward force).Light weight body (small m) Powerful engine (large F)application Blame Newton’s Second Law. The above equations are valid only when the mass m is constant. It ’s easy to think of systems whose masses change, such as a leaking tank truck, a rocket ship, or a moving railroad car being loaded with coal. Such systems are better handled by using the concept of momentum.Finally, Newton’s second law is valid in inertial frames of reference only, just like the first law. Thus it is not valid in the reference frame of any of the accelerating vehicles relative to any of these frames; the passenger accelerates even though the net force on the passenger is zero. We will usually assume that the earth is an adequate approximation to an inertial frame, although because of its rotation and orbital motion it is not precisely inertial.Here is something important to discuss that m is not a force even though the vector m is equal to the vector sum of all the forces acting on the body, the vector m is not a force. Acceleration is a result of a nonzero net force; it is not a force itself. It’s “common sense” to think that there is a “force of acceleration” that pushes you back into your seat when your car accelerates forward from rest. But there is no such force; instead, your inertia causes you to tend to stay at rest relative to the earth, and the car accelerates around you, The “common sense” confusion arises from trying to apply Newton’s second law where it isn’t valid—in the non-inertial reference frame of an accelerating car. We will always examine motion relative to inertial frames of reference only. Q5) Discuss conservation of angular momentum and energy for a particle in a central force field?A 5)ANGULAR MOMENTUMConsider the angular momentum of the reduced mass system L = r × p = r × . How does angular momentum L change with time? We have ……….(1)We use the product rule, which is valid for cross products as long as you don’t change the order of the factors. The second term after cross product is zero since ( × = 0). Recall that r × F which occurs in above expression is called the torque τ. We have shown that in the case of central forces the time derivative of the angular momentum, and hence the torque, are zero. Therefore: ……….(2) i.e. the angular momentum is conserved.The force F (r) depends only on the distance of the reduced mass from the center of mass and not on the orientation of the system in space. Therefore, this system is spherically symmetric; it is invariant (unchanged) under rotations. Noether’s theorem states that whenever the laws of physics are invariant under a particular motion or other operation, there will be a corresponding conserved quantity. In this case, we see that the conservation of angular momentum is related to the invariance of the physical system under rotations. This further can explain as belowAngular momentum: A vector quantity describing an object in circular motion; its magnitude is equal to the momentum of the particle, and the direction is perpendicular to the plane of its circular motion.Angular momentum is the rotational analog of linear momentum, it is denoted by l, and angular momentum of a particle in rotational motion is defined as:l = r × pThis is a cross product of r, i.e. the radius of the circle formed by the body in rotational motion, and p, i.e. the linear momentum of the body, the magnitude of a cross product of two vectors is always the product of their magnitude multiplied with the sine of the angle between them, therefore in the case of angular momentum the magnitude is given by, l = r p sinθThe law of conservation of angular momentum states that when no external torque acts on an object, no change of angular momentum will occur. For this let us derive relation between torque and angular momentumTorque and Angular Momentum RelationshipRelationship between torque and angular momentum can found as follows, = Differentiating LHS and RHS, = By the property of differentiation on cross products the above expression can be written as follows, = + is change in displacement with time, therefore it is linear velocity = + is linear momentum i.e. mass times velocity, = +Now notice the first term, there is × magnitude of cross product is given by × sinθ where the angle is 0 hence the whole term becomes 0.From newton’s 2nd law we know that is force, = We know that r × F is torque, hence = (torque)So rate of change of angular momentum is torque.Now this statement seems clearer to you; The law of conservation of angular momentum states that when no external torque acts on an object, no change of angular momentum will occur. The conserved quantity we are investigating is called angular momentum. The symbol for angular momentum is the letter L. Just as linear momentum is conserved when there is no net external force, angular momentum is constant or conserved when the net torque is zero. For the situation in which the net torque is zero, =0 If the change in angular momentum Δl is zero, then the angular momentum is constant; therefore,=constant(when net τ=0).This is an expression for the law of conservation of angular momentum.CONSERVATION OF ENERGY FOR A PARTICLE IN A CENTRAL FORCE FIELDSince central forces are conservative forces, we know that total energy must be conserved. Now we derive expressions for the total energy of a particle of mass m in a central force field. We will do this in two ways.First MethodFirst we compute the kinetic energy. The velocity is given by:And thereforeThe kinetic energy is given by:Therefore we have: ……….. (18) Q6) State Newton’s third law of motion? Discuss it by giving some example? A 6)NEWTON’S THIRD LAWForce acting on a body is always the result of its interaction with another body, so forces always come in pairs. You can’t pull on a doorknob without the door-knob pulling back on you. When you kick a football, the forward force that your foot exerts on the ball launches it into its trajectory, but you also feel the force the ball exerts back on your foot. In each of these cases, the force that you exert on the other body is in the opposite direction to the force that body exerts on you. Experiments show that whenever two bodies interact, the two forces that they exert on each other are always equal in magnitude and opposite in direction. This fact is called Newton’s third law of motion: If body A exerts a force on body B (an “action”), then body B exerts a force on body A (a “reaction”). These two forces have the same magnitude but are opposite in direction. These two forces act on different bodies.OrTo every action there is equal and opposite reaction.For example, A on B is the force applied by body A (first sub-script) on body B (second subscript), and B on A is the force applied by body B(first subscript) on body A (second subscript).
|
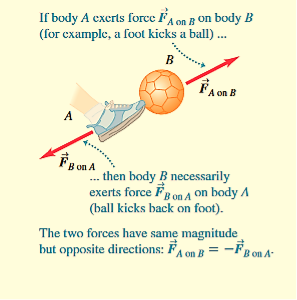 A on B = B on AIn the statement of Newton’s third law, “action” and “reaction” are the two opposite forces; we sometimes refer to them as an action–reaction pair. This is not meant to imply any cause-and-effect relation-ship; we can consider either force as the “action” and the other as the “reaction.” We often say simply that the forces are “equal and opposite,” meaning that they have equal magnitudes and opposite directions. the two forces in an action–reaction pair act on different bodies We stress that the two forces described in Newton’s third law act on different bodies. The action and reaction forces are contact forces that are present only when the two bodies are touching. But Newton’s third law also applies to long-range forces that do not require physical contact, such as the force of gravitational attraction. A table-tennis ball exerts an upward gravitational force on the earth that’s equal in magnitude to the downward gravitational force the earth exerts on the ball. When you drop the ball, both the ball and the earth accelerate toward each other. The net force on each body has the same magnitude, but the earth’s acceleration is microscopically small because its mass is so great. Nevertheless, it does move. Q 7) What do you mean by equipotential surface? Also discuss need of equipotential surface?A 7)EQUIPOTENTIAL SURFACES We already studied about Electric field lines help us to understand electric fields, because they give us a "visual" representation of an Electric field. Each of those lines represents the "direction" of the electric field, because the electric field (vector) is tangent to each point of those lines.In a similar way, the potential at points inside of an electric field can be represented "graphically" using equipotential surfaces.An Equipotential surface is a surface where the potential is the same (equal) for any point on top of that surface. In an area where an electric field exists we can construct an equipotential surface that passes through any point. In the diagrams we only show some equipotential lines, mostly with the same potential difference between neighbouring surfaces. And lasty, no point can have two or more different potentials and so equipotential lines can never be tangent and can never intersect.
A on B = B on AIn the statement of Newton’s third law, “action” and “reaction” are the two opposite forces; we sometimes refer to them as an action–reaction pair. This is not meant to imply any cause-and-effect relation-ship; we can consider either force as the “action” and the other as the “reaction.” We often say simply that the forces are “equal and opposite,” meaning that they have equal magnitudes and opposite directions. the two forces in an action–reaction pair act on different bodies We stress that the two forces described in Newton’s third law act on different bodies. The action and reaction forces are contact forces that are present only when the two bodies are touching. But Newton’s third law also applies to long-range forces that do not require physical contact, such as the force of gravitational attraction. A table-tennis ball exerts an upward gravitational force on the earth that’s equal in magnitude to the downward gravitational force the earth exerts on the ball. When you drop the ball, both the ball and the earth accelerate toward each other. The net force on each body has the same magnitude, but the earth’s acceleration is microscopically small because its mass is so great. Nevertheless, it does move. Q 7) What do you mean by equipotential surface? Also discuss need of equipotential surface?A 7)EQUIPOTENTIAL SURFACES We already studied about Electric field lines help us to understand electric fields, because they give us a "visual" representation of an Electric field. Each of those lines represents the "direction" of the electric field, because the electric field (vector) is tangent to each point of those lines.In a similar way, the potential at points inside of an electric field can be represented "graphically" using equipotential surfaces.An Equipotential surface is a surface where the potential is the same (equal) for any point on top of that surface. In an area where an electric field exists we can construct an equipotential surface that passes through any point. In the diagrams we only show some equipotential lines, mostly with the same potential difference between neighbouring surfaces. And lasty, no point can have two or more different potentials and so equipotential lines can never be tangent and can never intersect.
|
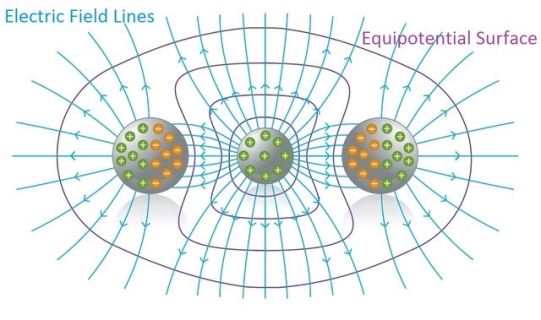
|
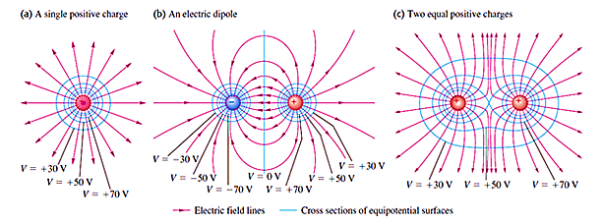
|
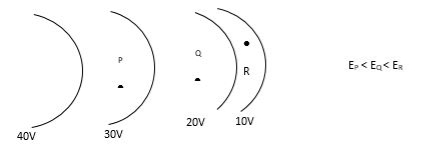
|
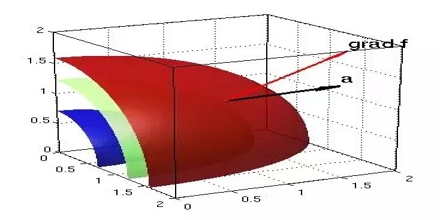
|
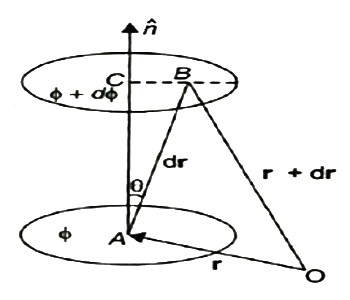
|
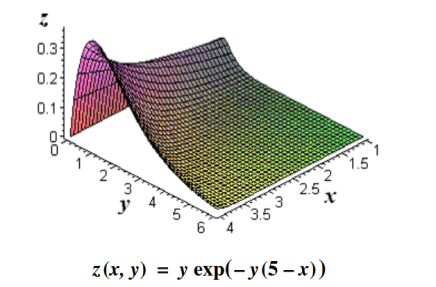
|
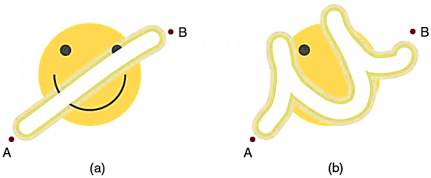
|
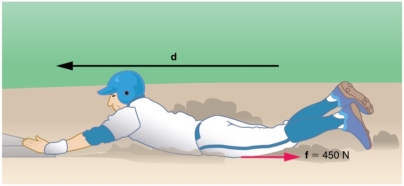 mvi2−fd=0orfd= mvi2.Solving the previous equation for d and substituting known values yieldsd= == d = =2.60 mThe most important point of this example is that the amount of non-conservative work equals the change in mechanical energy. For example, you must work harder to stop a truck, with its large mechanical energy, than to stop a mosquito. Q 12) Explain Central Forces and Derive equations of motion for a particle in a central force field?A 12)Suppose that force acting on a particle of mass m has the properties that:•the force is always directed from m toward, or away, from a fixed point O,•the magnitude of the force only depends on the distance r from OForces having these properties are called central forces. The particle is said to move in a central force field.
mvi2−fd=0orfd= mvi2.Solving the previous equation for d and substituting known values yieldsd= == d = =2.60 mThe most important point of this example is that the amount of non-conservative work equals the change in mechanical energy. For example, you must work harder to stop a truck, with its large mechanical energy, than to stop a mosquito. Q 12) Explain Central Forces and Derive equations of motion for a particle in a central force field?A 12)Suppose that force acting on a particle of mass m has the properties that:•the force is always directed from m toward, or away, from a fixed point O,•the magnitude of the force only depends on the distance r from OForces having these properties are called central forces. The particle is said to move in a central force field.
|
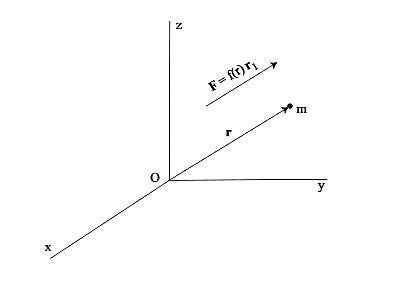 ………..(1)Where r1= is a unit vector in the direction of r.If f(r) <0 the force is said to be attractive towards O. If f(r)>0 the force is said to be repulsive from O.For example, the gravitational force of attraction between two point masses is a central force. The Coulomb force of attraction and repulsion between charged particles is a central force.Properties of a Particle Moving under the Influence of a Central ForceIf a particle moves in a central force field then the following properties hold:1. The path of the particle must be a plane curve, i.e., it must lie in a plane.2. The angular momentum of the particle is conserved, i.e., it is constant in time.3. The particle moves in such a way that the position vector (from the point O) sweeps out equal areas in equal times. In other words, the time rate of change in area is constant. This is referred to as the Law of Areas. Equations of Motion for a Particle in a Central Force FieldNow we will derive the basic equations of motion for a particle moving in a central force field. From Property 1 above, the motion of the particle must occur in a plane, which we take as the xy plane and the center of force is taken as the origin. In Fig. 2 we show the xy plane, as well as the polar coordinate system in the plane.
………..(1)Where r1= is a unit vector in the direction of r.If f(r) <0 the force is said to be attractive towards O. If f(r)>0 the force is said to be repulsive from O.For example, the gravitational force of attraction between two point masses is a central force. The Coulomb force of attraction and repulsion between charged particles is a central force.Properties of a Particle Moving under the Influence of a Central ForceIf a particle moves in a central force field then the following properties hold:1. The path of the particle must be a plane curve, i.e., it must lie in a plane.2. The angular momentum of the particle is conserved, i.e., it is constant in time.3. The particle moves in such a way that the position vector (from the point O) sweeps out equal areas in equal times. In other words, the time rate of change in area is constant. This is referred to as the Law of Areas. Equations of Motion for a Particle in a Central Force FieldNow we will derive the basic equations of motion for a particle moving in a central force field. From Property 1 above, the motion of the particle must occur in a plane, which we take as the xy plane and the center of force is taken as the origin. In Fig. 2 we show the xy plane, as well as the polar coordinate system in the plane.
|
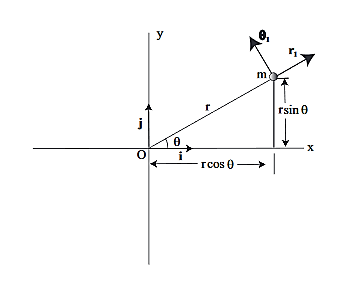 ………..(2)Then, using Newton’s second law, and the mathematical form for the central force given in (1), we have: ………..(3) ………..(4) ………..(5)These are the basic equations of motion for a particle in a central force field. They will be the starting point for many of our investigations. From these equations we can derive a useful constant of the motion. This is done as follows. From (5) we have: ……….. (6)This is an interesting relation that, we will see, is related to properties 2 and 3 above. However, one use for it should be apparent. If you know the r component of the motion it allows you to compute the θ component by integration. This is another example of how constants of the motion allow us to “integrate” the equations of motion. It also explains why constants of the motion are often referred to as integrals of the motion. Now, let us return to property 3 above and derive the Law of AreasSuppose that in time ∆t the position vector moves from r to r+∆r. Then the area swept out by the position vector in this time is approximately half the area of a parallelogram with sides r and ∆r. We give a proof of this: Area of parallelogram = height×|r|,=|∆r|sinθ|r|,=|r×∆r|,
………..(2)Then, using Newton’s second law, and the mathematical form for the central force given in (1), we have: ………..(3) ………..(4) ………..(5)These are the basic equations of motion for a particle in a central force field. They will be the starting point for many of our investigations. From these equations we can derive a useful constant of the motion. This is done as follows. From (5) we have: ……….. (6)This is an interesting relation that, we will see, is related to properties 2 and 3 above. However, one use for it should be apparent. If you know the r component of the motion it allows you to compute the θ component by integration. This is another example of how constants of the motion allow us to “integrate” the equations of motion. It also explains why constants of the motion are often referred to as integrals of the motion. Now, let us return to property 3 above and derive the Law of AreasSuppose that in time ∆t the position vector moves from r to r+∆r. Then the area swept out by the position vector in this time is approximately half the area of a parallelogram with sides r and ∆r. We give a proof of this: Area of parallelogram = height×|r|,=|∆r|sinθ|r|,=|r×∆r|,
Figure 28: Coordinate System Hence, ∆A= Dividing this expression by ∆t, and letting ∆t→0, gives: lim∆t→0
Now we need to evaluate r×v. Using
is called the areal velocity.
|





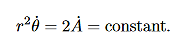
 ……….. (8) ……….. (9)We derived the following constant of the motion: ……….. (10)This constant of the motion will allow you to determine the θ component of motion, provided you know the r component of motion. However, (8) and (9) are coupled (nonlinear) equations for the r and θ components of the motion. How could you solve them without solving for both the r and θ components? This is where alternative forms of the equations of motion are useful. Let us rewrite (8) in the following form (by dividing through by the mass m): ……….. (11)Now, using (10), (11) can be written entirely in terms of r: ……….. (12)We can use (12) to solve for r(t), and the use (10) to solve for θ(t).Equation (12) is a non-linear differential equation. There is a useful change of variables, which for certain important central forces, turns the equation into a linear differential equation with constant coefficients and these can always be solved analytically. Here we describe this coordinate transformation. Let r = This is part of the coordinate transformation. We will also use θ as a new “time” variable. Coordinate transformation are effected by the chain rule, since this allows us to express derivatives of “old” coordinates in terms of the “new” coordinates. We have:
……….. (8) ……….. (9)We derived the following constant of the motion: ……….. (10)This constant of the motion will allow you to determine the θ component of motion, provided you know the r component of motion. However, (8) and (9) are coupled (nonlinear) equations for the r and θ components of the motion. How could you solve them without solving for both the r and θ components? This is where alternative forms of the equations of motion are useful. Let us rewrite (8) in the following form (by dividing through by the mass m): ……….. (11)Now, using (10), (11) can be written entirely in terms of r: ……….. (12)We can use (12) to solve for r(t), and the use (10) to solve for θ(t).Equation (12) is a non-linear differential equation. There is a useful change of variables, which for certain important central forces, turns the equation into a linear differential equation with constant coefficients and these can always be solved analytically. Here we describe this coordinate transformation. Let r = This is part of the coordinate transformation. We will also use θ as a new “time” variable. Coordinate transformation are effected by the chain rule, since this allows us to express derivatives of “old” coordinates in terms of the “new” coordinates. We have:
and
Where, in both expressions, we have used the relation r2
Substituting this relation, along with (14) into (8), gives:
Now if f(r) =
|





 =0Let us check= 0i+ 4zj+ 0k 0 and therefore F is not conservative.(b) F=ycosxyi+xcosxyj−sinzk =0Therefore F is conservative.
=0Let us check= 0i+ 4zj+ 0k 0 and therefore F is not conservative.(b) F=ycosxyi+xcosxyj−sinzk =0Therefore F is conservative. 




0 matching results found