Uni-3
Signal processing and conditioning
Q1) Explain signal conditioning.
A1) Signal processing and conditioning
The output signals from sensor of measurement system are generally need to be processed so it can be suitable for next stage. For example if signal is to small it needs to be amplify, if it contains some disturbances (noise) which has to be removed, non-linear signal required to be linear be analogue have to be made digital or vice versa, be a resistance change and have to be made into a current change, be a voltage change and have to be made into a suitable size current change, etc. All these changes are referred to as signal conditioning.
Signal conditioning processes
Signal conditioning system enhances the quality of signal coming from a sensor in terms of:
Following are some of the elements that might be used in signal conditioning
Q2) Write a short note on operational amplifier.
A2) Operational amplifier
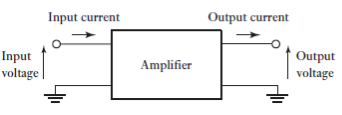
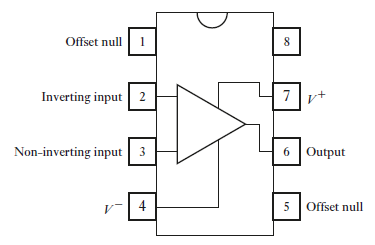
Amplifier is considering being essential system which have input and output as shown in figure 1. The ratio of output voltage to input voltage when each measured relative to earth is known as voltage gain. Input voltage is divided by input current is known as input impedance and when output voltage divided by output current is known as output impedance. Operational amplifier is basis of many signal conditioning modules. The operational amplifier is high gain d.c. amplifier. Operational amplifiers have gain of order of 100000 or more, that is supplied on integrated circuit in silicon chip. Operational amplifiers have two inputs one is inverting (-) and other is non-inverting (+). The output is depends connection to this input terminals. Operational amplifiers have other inputs too name negative voltage supply, positive voltage supple, and two offset null (figure 2). An ideal operational amplifier is as an amplifier with an infinite gain, infinite input impedance and zero output impedance, i.e. the output voltage is independent of the load.
|
|
Q3) Explain: Inverting amplifier.
A3) Inverting amplifier
|
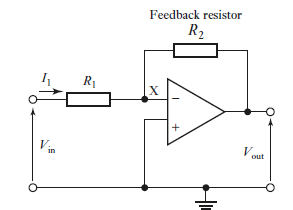
The Figure above shows connections made to amplifier when used as inverting amplifier. Input is supplied to inverting input terminal through resistance R1 and non-inverting terminal is ground. A feedback path is connected to inverting input via the resistor R2 from output. The operational amplifier has a voltage gain of about 100 000 and the change in output voltage is typically limited to about  10 V. The input voltage must then be between -0.0001 and +0.0001 V. This is virtually zero and so point X is at virtually earth potential. For this reason it is called a virtual earth. The potential difference across R1 is
10 V. The input voltage must then be between -0.0001 and +0.0001 V. This is virtually zero and so point X is at virtually earth potential. For this reason it is called a virtual earth. The potential difference across R1 is  Hence, for an ideal operational amplifier with an infinite gain, and hence
Hence, for an ideal operational amplifier with an infinite gain, and hence , the input potential
, the input potential  can be considered to be across R1. Thus
can be considered to be across R1. Thus
|

The operational amplifier has very high impedance between its input terminals; for a 741 about 2 MΩ. Thus there is no virtually current flow through point X into it. This is the condition for an ideal amplifier i.e. have infinite impedance and no current flows through X. so current through R2 is current flows through R1 which is I1. Potential difference across R2 is since
since  =0
=0
Therefore Potential difference across R2 is
|


The negative sign indicates that the output is inverted, i.e. 180° out of phase, with respect to the input.
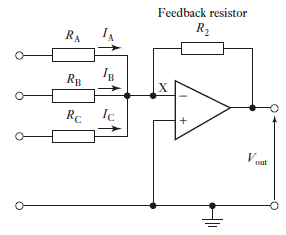
Q4) Explain summing amplifier.
A4) Figure 4 shows summing amplifier. Point X is a virtual earth.
The potential difference across R2 is
If
|







|
Q5) What is signal protection?
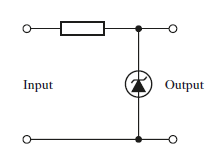
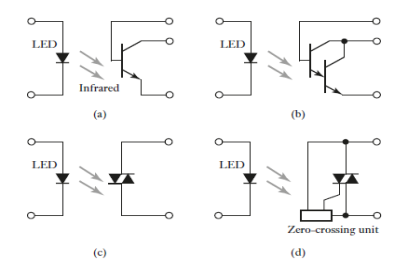
A5) In many situations there is possibilities of damage in circuit where connection of sensor to next unit due high current or high voltage. Circuit can be protected against a high current by connecting a series of resistance to input to limit the current up to acceptable level and a fuse to break if current exceed a safe. Zener diodes can be used to protect against high voltage and wrong polarity (figure 5). Up to some breakdown voltage Zener diode behaves like ordinary diode and after breakdown they become conducting. If maximum allowable voltage is 5 V so Zener diode stop voltages above 5.1 V getting through, so Zener diode with a voltage rating of 5.1 V chosen. Zener diode breakdown and its resistance drop to a very low value when the voltage rises to 5.1 V. The result is that the voltage across the diode, and hence that outputted to the next circuit, drops. Because the Zener diode is a diode with a low resistance for current in one direction through it and a high resistance for the opposite direction, it also provides protection against wrong polarity. It is connected with the correct polarity to give a high resistance across the output and so a high voltage drop. When the supply polarity is reversed, the diode has low resistance and so little voltage drop occurs across the output. Optoisolator are used to complete breakdown isolate circuits completely and remove all electrical connections between them. An optoisolator is an electronic component that transfers electrical signals between two isolated circuits by using light. Figure 6 shows a number of forms of optoisolator.
|
|
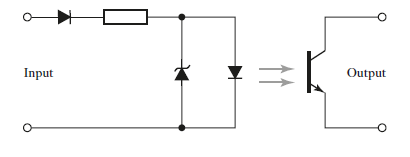
Optoisolator outputs can be used directly to switch low-power load circuits. Thus a Darlington optoisolator might be used as the interface between a microprocessor and lamps or relays. To switch a high-power circuit, an optocoupler might be used to operate a relay and so use the relay to switch the high-power device. A protection circuit for a microprocessor input is thus likely to be like that shown in Figure 7; to prevent the LED having the wrong polarity or too high applied voltage; it is also likely to be protected by the Zener diode circuit shown in Figure 6 and if there is alternating signal in the input a diode would be put in the input line to rectify it.
|
Q6) Explain signal filtering .
A6) Filtering
Process of removing a certain band of frequencies from a signal and permitting others to be transmitted is known as filtering. There are some basic terms used in filtering:
Pass band: The range of frequencies passed by a filter is known as the pass band.
Stop band: The range frequencies not passed by filter is known as the stop band.
Cut-off frequency: Boundary of frequencies between stopping and passing known as the cut-off frequency.
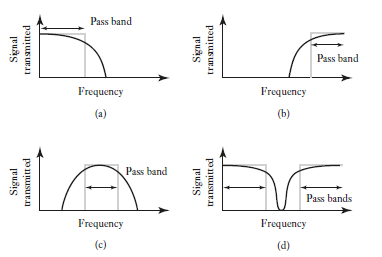
Filter are classified according to their stopping and passing frequency range
In all cases the cut-off frequency is defined as being that at which the output voltage is 70.7% of that in the pass band. The ratio of input and output powers is known as attenuation this being written as the ratio of the logarithm of the ratio and so gives the attenuation in units of bels. Since this is a rather large unit, decibels (dB) are used and then attenuation in dB = 10 lg (input power/output power). Since the power through an impedance is proportional to the square of the voltage, the attenuation in dB = 20 lg(input voltage/ output voltage). The output voltage of 70.7% of that in the pass band is thus an attenuation of 3 dB.
|
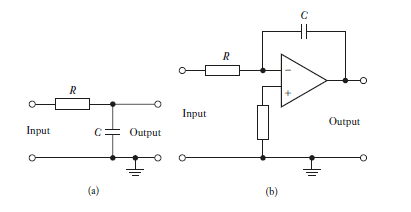
When filter are made up using resistors, capacitors and inductors are known as passive filters. When filters involves operational amplifier are known as active filters. Passive filters have the disadvantage that the current that is drawn by the item that follows can change the frequency characteristic of the filter. This problem does not occur with an active filter. Low-pass filters are very commonly used as part of signal conditioning. This is because most of the useful information being transmitted is low frequency. Since noise tends to occur at higher frequencies, a low-pass filter can be used to block it off. Thus a low-pass filter might be selected with a cut-off frequency of 40 Hz, thus blocking off any interference signals from the a.c. mains supply and noise in general. Figure 9 shows the basic form that can be used for a low-pass filter.
|
Q7) Explain hydraulic system.
A7) Hydraulic system
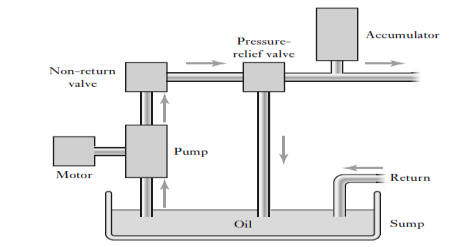
In hydraulic system pressurised oil is supplied through pump driven by electric motor. The pump pumps the oil from sump through non-return valve and accumulator to system from which it returns back to sump. Systematic arrangement is shown in figure 10. Pressure relief valve us also used to release the pressure if it exceed the safety level. Non-return valve prevent oil returning pump and accumulator is used to minimise fluctuations in output oil pressure.
|
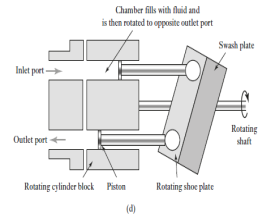
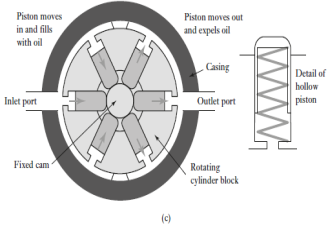
Q8) Draw neat sketch of
A8)
|
|
Q9) Write a note on DC motors.
A9) D.C. Motors
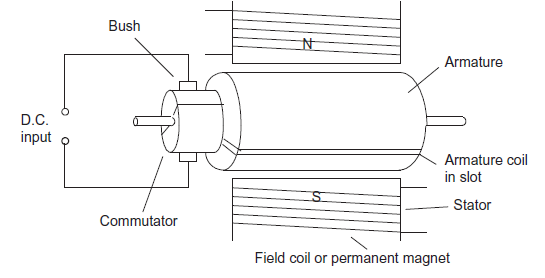
In the d.c. motor, coils of wire are mounted in slots on a cylinder of magnetic material called the armature. The armature is mounted on bearings and is free to rotate. It is mounted in the magnetic field produced by field poles. This magnetic field might be produced by permanent magnets or an electromagnet with its magnetism produced by a current passing through the, so-termed, field coils. Whether permanent magnet or electromagnet, these generally form the outer casing of the motor and are termed the stator. Figure 14 shows the basic elements of d.c. motor with the magnetic field of the stator being produced by a current through coils of wire. In practice there will be more than one armature coil and more than one set of stator poles. The ends of the armature coil are connected to adjacent segments of a segmented ring called the commutator which rotates with the armature. Brushes in fixed positions make contact with the rotating commutator contacts. They carry direct current to the armature coil. As the armature rotates, the commutator reverses the current in each coil as it moves between the field poles. This is necessary if the forces acting on the coil are to remain acting in the same direction and so continue the rotation.
|
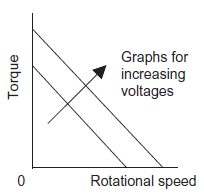
For a d.c. motor with the field provided by a permanent magnet, the speed of rotation can be changed by changing the size of the current to the armature coil, reversing the current in the armature coil can change the direction of rotation of the motor. Figure 15 shows how, for a permanent magnet motor, the torque developed varies with the rotational speed for different applied voltages. The starting torque is proportional to the applied voltage and the developed torque decreases with increasing speed.
D.C. motors classified as series, shunt, compound and separately excited according to how
the field windings and armature windings are connected.
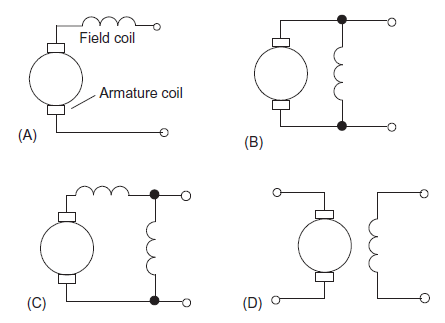
1. Series-wound motor: The armature and field coils are in series (Figure 16 A). Motor exerts the highest starting torque and greatest no-load speed. But with light loads there is a possibility series-wound motor will run at too high a speed. No effect on the direction of rotation of the motor if the polarity of the supply to the coils is reversed, since both the current in the armature and the field coils are reversed.
2. Shunt-wound motor: With the shunt-wound motor (Figure 16 B) the armature and field coils are in parallel. Shunt-wound motor have the lowest starting torque, lower no-load speed but has good speed regulation. Shunt-wound motor have constant speed without consideration of load and thus shunt-wound motors are very widely used. To reverse the direction of rotation, either the armature or field current can be reversed.
3. Compound motor: The compound motor have two field windings, one in series with the armature and one in parallel. Compound-wound motors have high starting torque and good speed regulation.
4. Separately excited motor: The separately excited motor (Figure 16D) have separate control of the armature and field currents. The direction of rotation of the motor can be obtained by reversing either the armature or the field current.
|
|
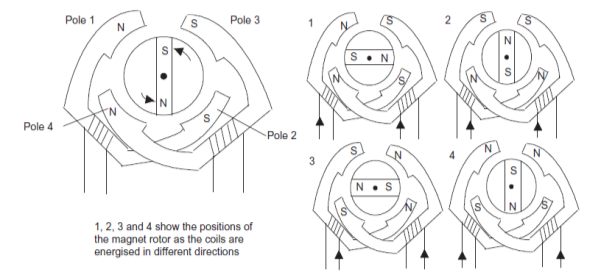
Q10) Write a note on Stepper Motor.
A10) For each digital pulse supplied to its input the stepper or stepping motor rotates through equal angles. For example, if 1 input pulse produces a rotation of 1.8 then 20 input pulses will produce a rotation through 36
then 20 input pulses will produce a rotation through 36 , 200 input pulses a rotation through one complete revolution of 360
, 200 input pulses a rotation through one complete revolution of 360 . Stepper motor can be used for accurate angular positioning. To drive a continuous belt, the angular rotation can be transformed into linear motion of the belt and so accurate linear positioning can be achieved. Such a motor is used with computer printers, x-y plotters, robots, machine tools and a wide variety of instruments for accurate positioning.
. Stepper motor can be used for accurate angular positioning. To drive a continuous belt, the angular rotation can be transformed into linear motion of the belt and so accurate linear positioning can be achieved. Such a motor is used with computer printers, x-y plotters, robots, machine tools and a wide variety of instruments for accurate positioning.
There are two types of stepper motor,
Figure 17 shows the basic elements of the permanent magnet type with two pairs of stator poles. Poles of the permanent magnet motor can be activated by a current passing through the field winding, the coils being such that opposite poles are produced on opposite coils. The current is supplied from a d.c. source to the windings through switches.
|