|
|
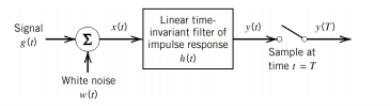
v(n) x(n)=s(n)+v(n)= h (n)∗ s d(n)+v(n) where s(n)= h (n)∗ s d(n).
If both d(n) and v(n) are assumed to be wide-sense stationary (WSS) random processes, then x(n) is also a WSS process. The signals that we discuss in this chapter will be WSS if they are not specially specified. If signal d(n) and measurement noise v(n) are assumed to be uncorrelated (this is true in many practical cases), then r (k) = r (k) = 0.
In this case, the noisy signal, x(n)= h (n)∗ s d(n)+v(n), the relation of r (k) x with r (k ) d and r (k) v (the autocorrelations of x(n), d(n) and v(n), respectively) as follows,
For the noisy signal of the form x(n)= d(n)+v(n), a special case of where h (n) s =δ (n) and no distortion happens to d(n) in its measurement, we have
|






|

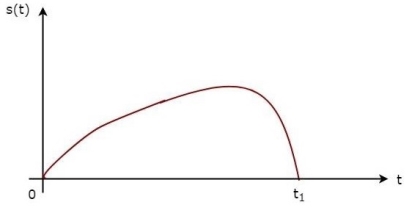
H(f)=GaS∗(f)e−j2πft1 ………..1 Where, Ga is the maximum gain of the Matched filter S(f) is the Fourier transform of the input signal, s(t) S∗(f) is the complex conjugate of S(f) t1 is the time instant at which the signal observed to be maximum
In general, the value of Ga is considered as one. We will get the following equation by substituting Ga=1in Equation 1.
H(f)=S∗(f)e−j2πft1 ……..2
|
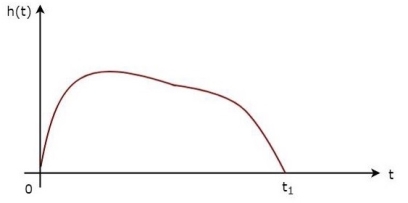
In time domain, we will get the output, h(t) of Matched filter receiver by applying the inverse Fourier transform of the frequency response function, H(f). h(t)= Substitute, Equation 1 in Equation 3. h(t)= ⇒h(t)= We know the following relation. S∗(f)=S(−f) ……..5 Substitute, Equation 5 in Equation 4. h(t)= ⇒h(t)= ⇒h(t)=Gas(t1−t)
In general, the value of Ga is considered as one. We will get the following equation by substituting Ga=1. h(t)=s(t1−t)
|





|
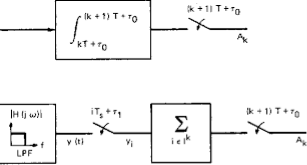
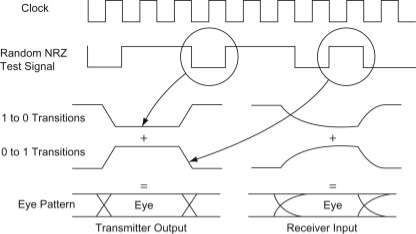
The receiving filter output y(t)y(t) is sampled at time ti=iTb (with i taking on integer values), yielding –
y(ti)= μ∑akp(iTb−kTb)
= μai+μ∑akp(iTb−kTb)
|
|
|
|