|

|
|
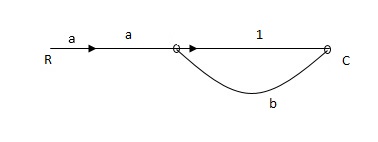
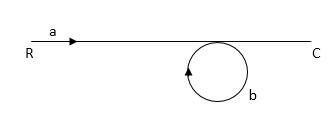
A2) X1- I/p node X2-Intenmediale node X3- o/p node ab- forward path (p) bc- 1 loop (L) At node XQ: X2 = x1a + x3c [Add i/p signals at node] At node x3: x2b =x3 (x1a+x3c) b = x3 X1ab = x3 (1-bc) X1 = x3 (1-bc)/ab Ab/(1-bc) = x3/x1 T= p/1-L
X1:- I/p node x2, x3,x4,x5,Qnlexmedili node X0:- o/p node abdeg:- forward path bc, ef :- Loop [isolated] x2 = ax1+c x3 x3= bx2 x4 = d x3+f x5 x5 = e x4 x6= g x5 x6 = g(e x4) = ge [dx3+ e f x5] xb = ge [d (bx2) + f (e x4)] xb = ge [ db (ax1+cx3) + fe (dx3+ fx5)] xb = ge [db (ax1+cb (ax1+x3) +fe[cdbx2]+ f( e [db (ax1+ cx3) x2 = ax1 + cb (x2) x4 = d bx2 + f exq x2 = ax1 + cbx2 = db (d4) + fe/1-cb x2 = ax1/(1-cb) xy = db x2 + f x6/g xy = db [ax1]/1-cb + f xb/g x5 = c db ( ax1)/1-cb + efxb/g xb = gx5 = gedb (ax1)/1-cb + g efxb/g Xb = gx5 gedb (ax1)/1-cb + g efxb/g (1- gef/g) xb = gedb ax1/1-ab Xb/x1 = gedb a/ (1- ef – bc + beef Xb/x1 = p/ 1- (L1+L2) + L1 L2 for isolated loops. |


|















 A3)
A3)
|
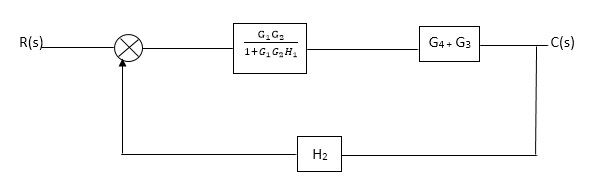
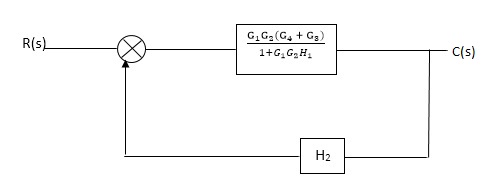
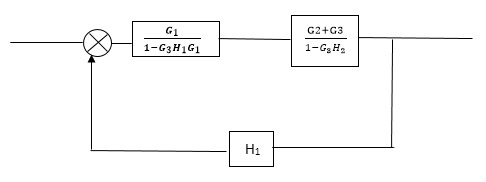
C(S)/R(S) = (G1G2) (G3+G4)/1+G1G2H1)/1-G1,G2(G3+G4) H2/1+G1G2H1 = G1G2(G3+G4)/1+G1G2H1-G1G2H2(G3+G4) =G1G2(G3+G4)/1+(H1-H2)(G1G2) (G3+G4) C(s)/R(S) = G1G2(G3+G4)/1+(H1-H2(G3+G4)) G1 G2 |

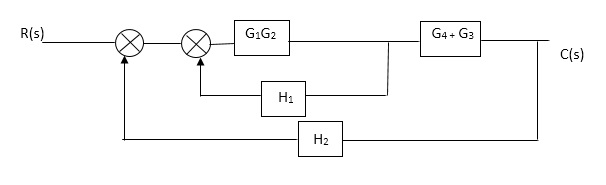


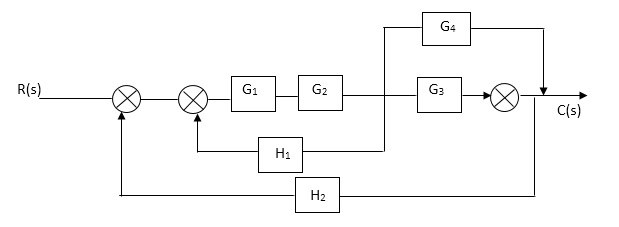
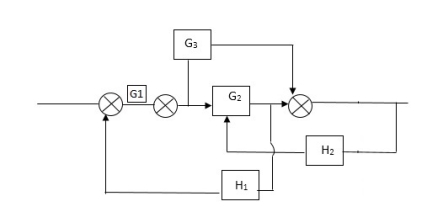
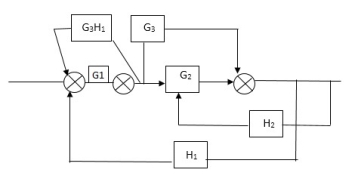
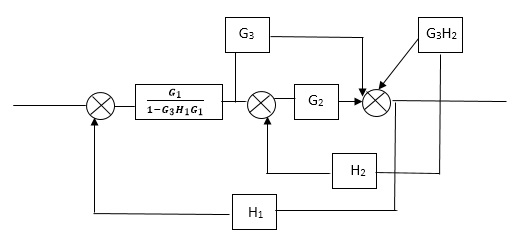
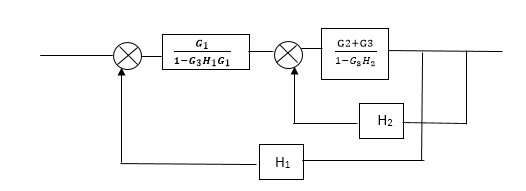
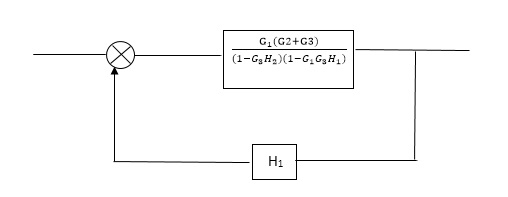
 Reduce the Block diagram
Reduce the Block diagram
|
|
|
|


|
A4) L1= -G1 H1
= 1+G1H1 T= G1+G2/1+G1H1
|



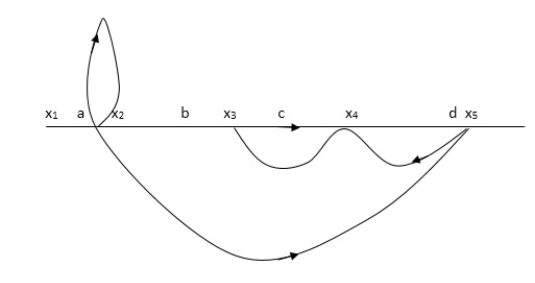
P1 = abcd p2 = ag L1 = f L2 = ce, L3= dh
= 1-[f+ le = dh] + [fce +fdh] T= abcd+ ag (1-ce)/1-[ftce + dh ] + (fce + fdh) |



|
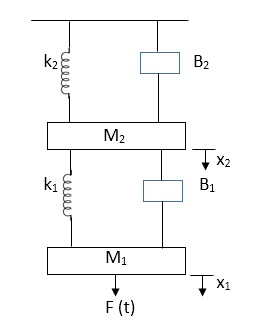
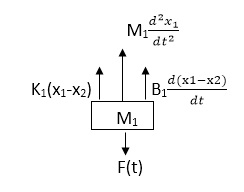
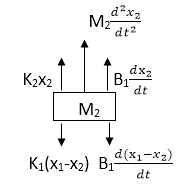
F(t) = M1 d2/dt2x1+ B1 d/dt (x1-x2)+ k1(x1-x2) Similarly for M2we have
K1(x1-x2) + B1d/dt(x1-x2) = k2x2+M2d2/dt2+B2dx2/dt |
|
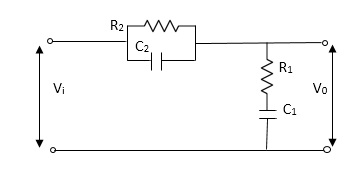
A7) Let Z1 = R2 11 1/c2 =R2*1/c2s/R2+1/c2s Z1= R2/1+R2c2s Let Z2 = R1+1/c1s Z2= 1+R1c1s/c1s V0(s)/vi(s) = z2/z1+z2 = 1+R1c1s/c1s/R2/1+R2c2s+1+R1c1s/c1s V0(s)/v0(s) =(c1+R1c1s) (1+R2c2s)/R2c1s+1+sR1c1s2R1R2c1c2 |
|

|

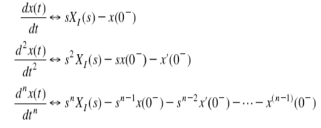
If f1(t) and f2(t) are two functions of time. Then, in domain of convergence L[a f1(t)+b f2(t)]=a =aF1(s)+bF2(s) |


|
|









|
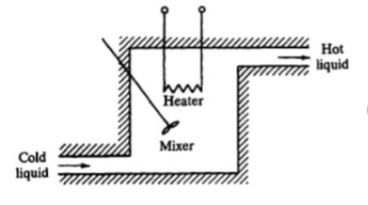
Let us assume that the temperature of inflowing liquid is kept constant. Let the heat input rate to the thermal system supplied by the heater is suddenly changed from Q to Q + q1. Due to this, the heat output flow rate will gradually change from Q to Q + q0. The temperature of the outflowing liquid will also be changed from θ0 to θ0 + θ. For this system the equation for q0, C and R is obtained as follows,
|
.jpg)
|

|
|
From equation (3) , R = θ/q0 q0 = θ/R
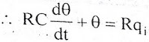
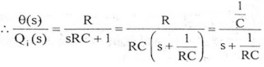
Let, L {θ} = θ(s); L{dθ/dt} = sθ(s) ; L{q1} = Q1(s) On taking Laplace transform of equation (7) RC s θ(s) + θ(s) = R Q1(s) θ(s) [sRC + 1] = R Q1(s)
|