C( S ) / R( S ) = G( S ) / 1 + G( S ) + H( S ) As it is unity feedback so, H(S) = 1 C(S)/R(S) = G(S)/1 + G(S) = 20/S2 + 5S + 4/1 + 20/S2 + 5S + 4 C(S)/R(S) = 20/S2 + 5S + 24 Standard equation for second order system, S2 + 2ξWnS + Wn2 = 0 We have, S2 + 5S + 24 = 0 Wn2 = 24 Wn = 4.89 rad/sec 2ξWn = 5 (a). ξ = 5/2 x 4.89 = 0.511 (b). Mp% = e-∏ξ / √1 –ξ2 x 100 = e-∏ x 0.511 / √1 – (0.511)2 x 100 Mp% = 15.4%
(c). tr = ∏ - φ / Wd φ = tan-1√1 – ξ2 / ξ φ= tan-1√1 – (0.511)2 / (0.511) φ = 1.03 rad. tr = ∏ - 1.03/Wd Wd = Wn√1 – ξ2 = 4.89 √1 – (0.511)2 Wd = 4.20 rad/sec tr = ∏ - 1.03/4.20 tr = 502.34 msec
(d). tp = ∏/4.20 = 747.9 msec |
C(S)/R(S) = Wn2 / S2 + 2ξWnS + Wn2 = (5)2 / S2 + 2 x 0.7 x S + (5)2 C(S)/R(S) = 25 / S2 + 7s + 25
(ii). tp = ∏ / Wd Wd = Wn√1 - ξ2 = 5√1 – (0.7)2 = 3.571 sec
(iii). tr = ∏ - φ/Wd φ= tan-1√1 – ξ2 / ξ = 0.795 rad tr = ∏ - 0.795 / 3.571 tr = 0.657 sec
(iv). For 2% settling time ts = 4 / ξWn = 4 / 0.7 x 5 ts = 1.143 sec
(v). Mp = e-∏ξ / √1 –ξ2 x 100 Mp = 4.59% |
C(S)/R(S) = G(S) / 1 + G(S)H(S) H(S) = 1 C(S)/R(S) = K/S(1 + ST) / 1 + K/S(1 + ST) C(S)/R(S) = K/S(1 + ST) + K C(S)/R(S) = K/T / S2 + S/T + K/T For second order system, S2 + 2ξWnS + Wn2 2ξWn = 1/T ξ = 1/2WnT Wn2 = K/T Wn =√K/T ξ = 1 / 2√K/T T ξ = 1 / 2 √KT forξ1 = 0.2, for ξ2 = 0.4 ξ1 = 1 / 2 √K1T ξ2 = 1 / 2 √K2T ξ1/ ξ2 = √K2/K1 K2/K1 = (0.2/0.4)2 K2/K1 = 1 / 4 K1 = 4K2
|
Mp = 5% = 0.05 Mp = e-∏ξ / √1 –ξ2 0.05 = e-∏ξ / √1 –ξ2 Cn 0.05 = - ∏ξ / √1 –ξ2 -2.99 = - ∏ξ / √1 –ξ2 8.97(1 – ξ2) = ξ2∏2 0.91 – 0.91 ξ2 = ξ2 0.91 = 1.91 ξ2 ξ2 = 0.69 (ii). ts = 4/ ξWn 4 = 4/ ξWn Wn = 1/ ξ = 1/ 0.69 Wn = 1.45 rad/sec |

S4 | 1 | 3 | 5 |
S3 | 2 | 4 | 0 |
| 1 | 5 | 0 |
| -6 | 0 | 0 |
S0 | 5 | 0 | 0 |


 = 1For row S2 Second termS2 =
= 1For row S2 Second termS2 =  = 5For row S1: S1 =
= 5For row S1: S1 =  = -6For row S0S0 =
= -6For row S0S0 =  = 5As there are two sign change in the first column, So there are two roots or right half of S-plane making system unstable.Q6) Using Routh criterion determine the stability of the system with characteristic equation S4+8S3+18S2+16S+S = 0 A6) Arrange in rows.
= 5As there are two sign change in the first column, So there are two roots or right half of S-plane making system unstable.Q6) Using Routh criterion determine the stability of the system with characteristic equation S4+8S3+18S2+16S+S = 0 A6) Arrange in rows.
| 1 | 18 | 5 |
S3 | 8 | 16 | 0 |
S2 | 16 | 5 |
|
S1 | 13.5 |
|
|
S0 | 5 |
|
|

 = 16Second terms =
= 16Second terms =  = 5For S1First element =
= 5For S1First element =  = 13.5For S0 First element =
= 13.5For S0 First element =  = 5As there is no sign change for first column so all roots are is left half of S-plane and hence system is stable.Q7) Determine the stability of the system represent by following characteristic equations using Routh criterion1) S4 + 3s3 + 8s2 + 4s +3 = 02) S4 + 9s3 + 4S2 – 36s -32 = 0 A7)1) S4+3s3+8s2+4s+3=0
= 5As there is no sign change for first column so all roots are is left half of S-plane and hence system is stable.Q7) Determine the stability of the system represent by following characteristic equations using Routh criterion1) S4 + 3s3 + 8s2 + 4s +3 = 02) S4 + 9s3 + 4S2 – 36s -32 = 0 A7)1) S4+3s3+8s2+4s+3=0S4 | 1 | 8 | 3 |
S3 | 3 | 4 | 0 |
S2 | 6.66 | 3 |
|
S1 | 2.650 | 0 |
|
S0 | 3 |
|
|
S4 | 1 | 4 | -32 |
| 9 |
| 0 |
| 8 | -32 |
|
S1 | 0 | 0 |
|
S0 |
|
|
|




 = 16S – 0 =0
= 16S – 0 =0S4 | 1 | 4 | -32 |
S3 | 9 | -36 | 0 |
S2 | 8 | -32 |
|
| 16 | 0 |
|
S0 | -32 |
|
|

 find range of k for stabilityA8) Findlay characteristics equation.
find range of k for stabilityA8) Findlay characteristics equation.CE = 1+G (s) H(s) = 0 H(s) =1 using feedback CE = 1+ G(s) 1+ S(S+1)(S+3)(S+4)+k = 0 (S2+5)(S2+7Sα12)αK = 0 S4α7S3α1252+S3α7S2α125αK = 0 S4+8S3α19S2+125+k = 0 |

S4 | 1 | 19 | K |
S3 | 8 | 12 | 0 |
S2 | 17.5 | K |
|
S1 |
| 0 |
|
S0 | k |
|
|

 .Q9) The characteristic equation for certain feedback control system is given. Find range of K for system to be stable.
.Q9) The characteristic equation for certain feedback control system is given. Find range of K for system to be stable.
| 1 | 12 | K |
S3 | 4 | 36 |
|
S2 | 3 | K |
|
S1 |
|
|
|
S0 | K |
|
|


S4+4S3α12S2+36SαK = 0 For stability K>0
K < 27 Range of K will be 0 < K < 27 |

S3 | 1 | 25 |
|
S2 | 6 | 38 |
|
S1 | 18.67 |
|
|
S0 | 38 |
|
|

No sign change in first column, hence all roots are in left half of S-plane. Replacing S = Z-1. In above equation (Z-1)3+6(Z-1)2+25(Z-1)+38 = 0 Z3+ Z23+16Z+18=0 |
Z3 | 1 | 16 |
Z2 | 3 | 18 |
Z1 | 10 |
|
Z0 | 18 |
|
 No sign change in first column roots lie on left half of Z-plane hence all roots of original equation in S-domain lie to left half 0f S = -1Q11) Explain relative stability?A11) Routh stability criterion deals about absolute stability of any closed loop system. For relative stability we need to shift the S-plane and the apply the Routh criterion.
No sign change in first column roots lie on left half of Z-plane hence all roots of original equation in S-domain lie to left half 0f S = -1Q11) Explain relative stability?A11) Routh stability criterion deals about absolute stability of any closed loop system. For relative stability we need to shift the S-plane and the apply the Routh criterion.
|
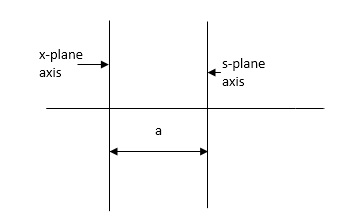
 .S = Z-S1After substituting new valve of S =(Z-S1) applying Routh stability criterion, the number of sign changes in first column is the number of roots on right half of S-plane
.S = Z-S1After substituting new valve of S =(Z-S1) applying Routh stability criterion, the number of sign changes in first column is the number of roots on right half of S-plane 



