|
|
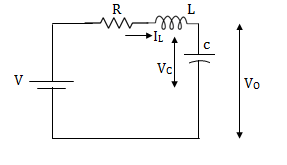
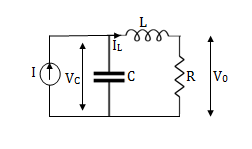
Y(t)=CX(t)+DU(t) V0=Vc= x1(t) ….(a) Hence output equation becomes V0= x1(t) y(t)=[1 0] so, C=[1 0] D=[0] Now writing the state equation
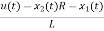
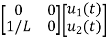
For that applying KVL in the above circuit V=ILR+L State Equation is
x1(t)=Vc
IL=C
VL=L
From KVL L
From equation (b) and (c)
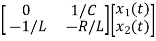
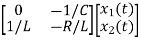
Now writing the state equation
Hence A= |


































|
|
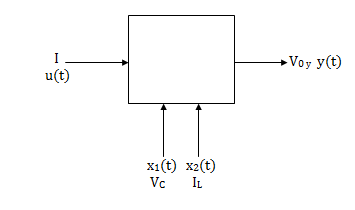
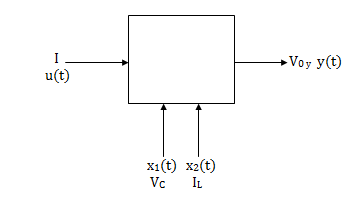
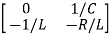
V0=x2(t)R y(t)= V0= [0 R] The output equation is given as Y(t)=CX(t)+DU(t) C=[0 R] D=[0] Now finding state equation,we apply KCL in the given electrical circuit I=IC+IL
But I-IL=IC
Applying KVL in the given electrical circuit we get VC=VL+ILR VC-ILR=VL=L
From equation (b) and (c) we have Now writing the state equation
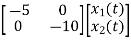
Hence A= |



























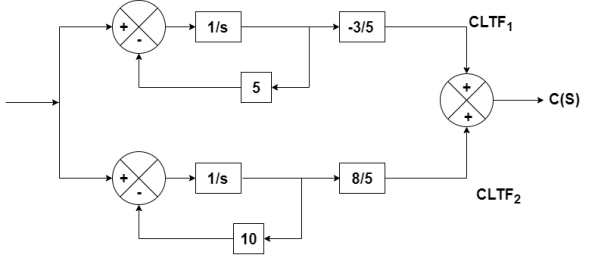
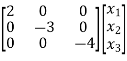
 . Calculate the state model?A3) The transfer function can be simplified using partial fraction method as
. Calculate the state model?A3) The transfer function can be simplified using partial fraction method as
S+2=As+10A+Bs+5B Equating coefficients of s from both sides A+B=1 Equating coefficients of s0 from both sides 10A+5B=2 Solving above equations we get A=-3/5 B=8/5 The transfer function will be T(s)= =- |
|
Number of poles= Number of energy storing elements
|




 The output equation is given as
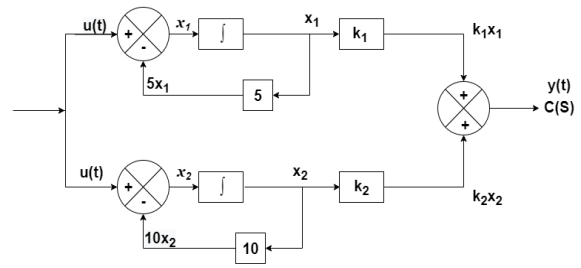
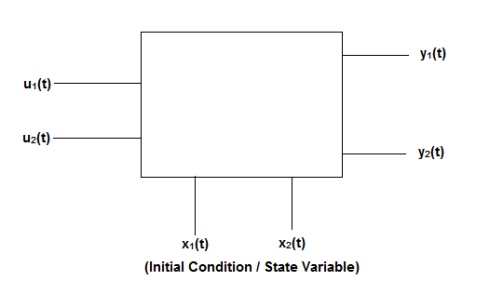
The output equation is given asy(t)=k1x1(t)+k2x2(t) y(t)= [k1 k2] y(t)= [-3/5 8/5] C=[-3/5 8/5] D=0 From the above block diagram
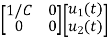
Therefore, the state equation is given as
A= B= |









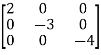
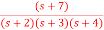 . Calculate the state model?A4) The transfer function can be simplified using partial fraction method as
. Calculate the state model?A4) The transfer function can be simplified using partial fraction method as
s+7=A[s2+7s+12] +B[s2+6s+8] +C[s2+5s+6] Equating coefficients of s2 from both sides A+B+C=0 Equating coefficients of s from both sides 7A+6B+5C=1 Equating coefficients of s0 from both sides 12A+8B+6C=7 Solving above equations and finding values of A, B and C A=5/2 B=-4 C=3/2 The transfer function will be T(s)= = |
|





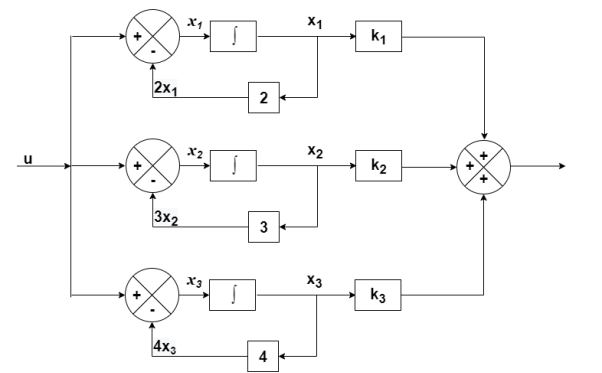
 The output equation will be
The output equation will bey=k1x1+k2x2+k3x3 y=[k1 k2 k3] C=[5/2 -4 3/2] D=[0] The state equation is given as
Therefore
A= B= |









 . Find the state equation?A5) Here the number of poles = number of zeros
. Find the state equation?A5) Here the number of poles = number of zerosT(s)= = = =2+ =2+ Solving above by partial fraction method 88= As+2A+Bs+3B A=-B 2A+3B=88 A=-88 B=88 The transfer function becomes T(s)= 2- |
|
|







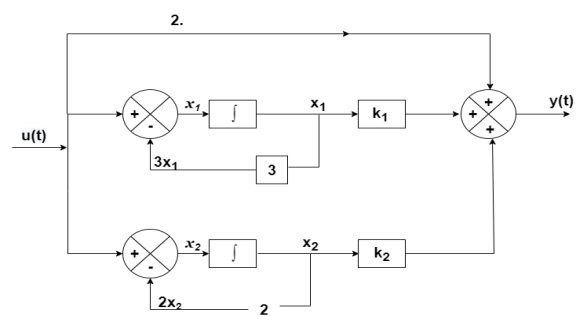
 The output equation will be
The output equation will bey(t)=2U+k1x1+k2x2 y=[-88 88] The output equation will be
Therefore, the state equation is given as
A= B= |





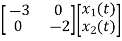



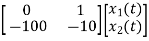
 . Find the state equation?A6)
. Find the state equation?A6) T(s)= = P1=2/s P2=-8/s2 L1=-10/s L2=-100/s2 |
|


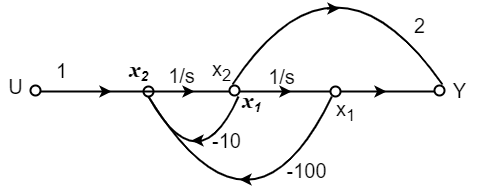
 The state equation will be
The state equation will be
|




 A7) Let y=x1
A7) Let y=x1
The above differential equation than becomes
Hence the state equation will be
|













 B=
B= C=[1 0] and D=[0]A8) The state equation will be
C=[1 0] and D=[0]A8) The state equation will be
From Equation (14)
=C{ =C =[1 0] = |













|
Y(t)=Cx(t)+Du(t) (1) Taking L.T of equation (1) Y(s)=CX(s)+DU(s) (3) Taking L.T of equation (2) SX(s)=AX(s)+BU(s) (4) X(s)=[SI-A]-1BU(s) (5) Y(s)=CX(s)+DU(s) Y(s)=C{[SI-A]-1BU(s)} + DU(s)
[SI-A]-1= The denominator of equation (6) is the characteristic equation [SI-A]=0 |







