Unit - 2
Matrix representation of a linear transformation
Q1) Define linear transformation.
A1)
Let V and U be vector spaces over the same field K. A mapping F : V  U is called a linear mapping or linear transformation if it satisfies the following two conditions:
U is called a linear mapping or linear transformation if it satisfies the following two conditions:
(1) For any vectors v; w  V, F(v + w) = F(v) + F(w)
V, F(v + w) = F(v) + F(w)
(2) For any scalar k and vector v  V, F(kv) = k F(v)
V, F(kv) = k F(v)
Now for any scalars a, b  K and any vector v, w
K and any vector v, w  V, we obtain
V, we obtain
F (av + bw) = F(av) + F(bw) = a F(v) + b F(w)
Q2) What do you understand by the matrix representation of linear transformation?
A2)
Ordered basis- Let V be a finite-dimensional vector space. An ordered basis for V is a basis for V endowed with a specific order; that is, an ordered basis for V is a finite sequence of linearly independent vectors in V that generates V.
Definition. Let  = {
= { ,
, , . . . ,
, . . . ,  } be an ordered basis for a finite dimensional
} be an ordered basis for a finite dimensional
Vector space V. For x ∈ V, let  ,
,  , . . . ,
, . . . , be the unique scalars
be the unique scalars
Such that

We define the coordinate vector of x relative to  , we denote it by
, we denote it by 

Q3) let  given by
given by

A3)
Let  be the standard ordered bases for
be the standard ordered bases for  , respectively. Now
, respectively. Now

And

Hence
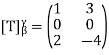
If we suppose  , then
, then
Q4)  be the linear operator defined by F(x, y) = (2x + 3y, 4x – 5y).
be the linear operator defined by F(x, y) = (2x + 3y, 4x – 5y).
Find the matrix representation of F relative to the basis S = {  } = {(1, 2), (2, 5)}
} = {(1, 2), (2, 5)}
A4)
(1) First find F( , and then write it as a linear combination of the basis vectors
, and then write it as a linear combination of the basis vectors  and
and  . (For notational convenience, we use column vectors.) We have
. (For notational convenience, we use column vectors.) We have

And
X + 2y = 8
2x + 5y = -6
Solve the system to obtain x = 52, y =-22. Hence,

Now

X + 2y = 19
2x + 5y = -17
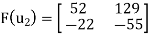
Solve the system to obtain x = 129, y =-55. Hence,

Now write the coordinates of  and
and  as columns to obtain the matrix
as columns to obtain the matrix
Q5)  be the linear operator defined by F(x, y) = (2x + 3y, 4x – 5y).
be the linear operator defined by F(x, y) = (2x + 3y, 4x – 5y).
Find the matrix representation  of F relative to the basis S = {
of F relative to the basis S = {  } = {(1, -2), (2, -5)}
} = {(1, -2), (2, -5)}
A5)
Step 0 - First find the coordinates of  relative to the basis S. We have
relative to the basis S. We have
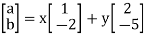
Or


Solving for x and y in terms of a and b yields x = 5a + 2b, y = -2a – b, thus

Step 1- Now we find  and write it as a linear combination of
and write it as a linear combination of  and
and  using the above formula for (a, b). And then we repeat the process for
using the above formula for (a, b). And then we repeat the process for  . We have
. We have


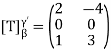
Step 2- Now, we write the coordinates of  and
and  as columns to obtain the required matrix:
as columns to obtain the required matrix:
Q6) Define left inverse and right inverse.
A6)
Let f : S → T be any function. Then
1. A function g : T → S is called a left inverse of f if (g o f)(x) = x, for all x ∈ S. That is, g o f = Id, the identity function on S.
2. A function h : T → S is called a right inverse of f if (f o h)(y) = y, for all y ∈ T. That is, f 0 h = Id, the identity function on T.
3. f is said to be invertible if it has a right inverse and a left inverse.
Q7) Let V, W, and Z be vector spaces over the same field F, and let T: V → W and U: W → Z be linear. Then UT: V → Z is linear.
A7)
Let x, y ∈ V and a ∈ F. Then UT(ax + y) = U(T(ax + y)) = U(aT(x) + T(y))
= aU(T(x)) + U(T(y)) = a(UT)(x) + UT(y).
Q8) What do you understand by invertible transformation?
A8)
Let V and W be vector spaces, and let T: V → W be linear.
A function U: W → V is said to be an inverse of T if TU =  and UT = IV.
and UT = IV.
If T has an inverse, then T is said to be invertible. As noted in Appendix B,
If T is invertible, then the inverse of T is unique and is denoted by  .
.
The following conditions hold for invertible functions T and U.
1.  =
=  .
.
2.  = T; in particular,
= T; in particular,  is invertible.
is invertible.
3. Let T: V → W be a linear transformation, where V and W are finite dimensional spaces of equal dimension. Then T is invertible if and only
If rank(T) = dim(V).
Q9) Let V and W be vector spaces, and let T: V → W be linear and invertible. Then T−1: W → V is linear.
A9)
Let  ,
, ∈ W and c ∈ F. Since T is onto and one-to-one, there
∈ W and c ∈ F. Since T is onto and one-to-one, there
Exist unique vectors x1 and x2 such that T( ) =
) =  and T(
and T( ) =
) =  . Thus
. Thus
 =
=  (
( ) and
) and  =
=  (
( ); so
); so

Q10) Let V and W be finite-dimensional vector spaces (over the same field). Then V is isomorphic to W if and only if dim (V) = dim (W).
A10)
Suppose that V is isomorphic to W and that T: V → W is an isomorphism from V to W. By the lemma, we have that dim(V) = dim(W).
Now suppose that dim(V) = dim(W), and let  = {v1, v2, . . . , vn}. And
= {v1, v2, . . . , vn}. And  = {w1, w2, . . . , wn} be bases for V and W, respectively
= {w1, w2, . . . , wn} be bases for V and W, respectively
There exists T: V → W such that T is linear and T(vi) = wi for i = 1, 2, . . . , n. We have
R(T) = span(T( )) = span(
)) = span( ) = W.
) = W.
So T is onto.
We have that T is also one-to-one. Hence T is an isomorphism.
Q11) what is called linear functional?
A11)
Let V be a vector space over a field K. A mapping  is called a linear functional if, for every u, v
is called a linear functional if, for every u, v  V and every a, b
V and every a, b

Note- a linear functional on V is a linear mapping from V into K.
The set of linear functionals on a vector space V over a field K is also a vector space over K, with addition and scalar multiplication defined by

And

Where  and
and  are linear functionals on V and k belongs to K. This space is called the dual space of V and is denoted by V*.
are linear functionals on V and k belongs to K. This space is called the dual space of V and is denoted by V*.
Q12) What is dual basis?
A12)
Definition of dual basis:
We call the ordered basis β∗ = {f1, f2, . . . , fn} of V∗ that satisfies fi(xj) =  (1 ≤ i, j ≤ n) the dual basis of β.
(1 ≤ i, j ≤ n) the dual basis of β.
Note- Let V be a finite-dimensional vector space with dual space V*. Then every ordered basis for V* is the dual basis for some basis for V.
Q13) What are annihilators?
A13)
Let W be a subset (not necessarily a subspace) of a vector space V. A linear functional  V* is called an annihilator of W if
V* is called an annihilator of W if  w) = 0 for every w
w) = 0 for every w  W, that is, if
W, that is, if  w) = {0}. We show that the set of all such mappings, denoted by
w) = {0}. We show that the set of all such mappings, denoted by  and called the annihilator of W, is a subspace of V*. Clearly, 0
and called the annihilator of W, is a subspace of V*. Clearly, 0 
Now suppose  ,
, 
 . Then, for any scalars a, b
. Then, for any scalars a, b  K and for any w
K and for any w  W,
W,

Thus 
 and so
and so  is a subspace of V*.
is a subspace of V*.
Q14) What is field?
A14)
A field F is a set on which two operations + and · (called addition and multiplication, respectively) are defined so that, for each pair of elements x, y in F, there are unique elements x+y and x·y in F for which the following conditions hold for all elements a, b, c in F.
(1) a + b = b + a and a·b = b·a
(commutativity of addition and multiplication)
(2) (a + b) + c = a + (b + c) and (a·b)·c = a· (b·c)
(associativity of addition and multiplication)
(3) There exist distinct elements 0 and 1 in F such that
0 + a = a and 1·a = a
(existence of identity elements for addition and multiplication)
(4) For each element a in F and each nonzero element b in F, there exist
Elements c and d in F such that
a + c = 0 and b·d = 1
(existence of inverses for addition and multiplication)
(5) a·(b + c) = a·b + a·c
(distributivity of multiplication over addition)




