|
|
|
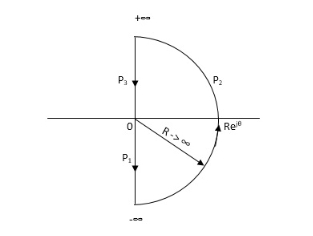
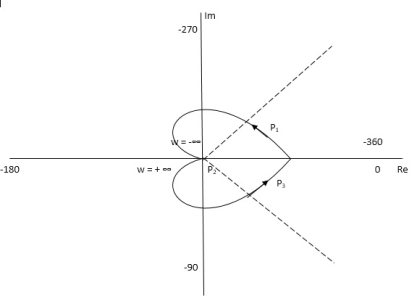
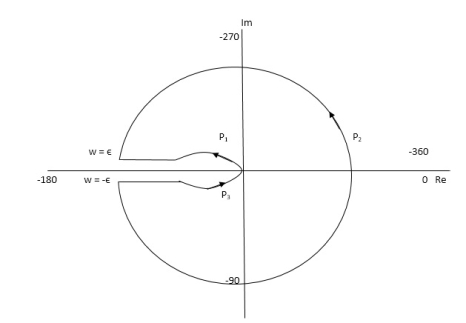
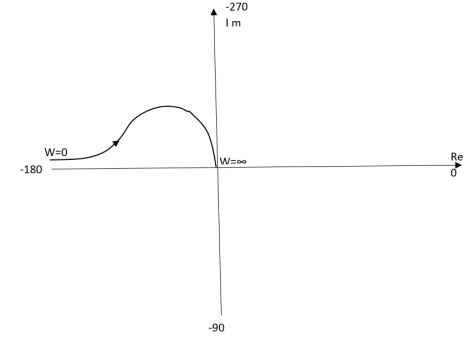
Path P1 W(0 to -∞) M = 1/√42 + w2 √52 + w2 Φ = -tan-1(W/4) – tan-1(W/5) W M Φ 0 1/20 00 -1 0.047 25.350 -∞ 0 +1800 Path P3 will be the mirror image across the real axis. Path P2 :ϴ(-π/2 to 0 to +π/2) S = Rejϴ G(S) = 1/(Rejϴ + 4)( Rejϴ + 5) R∞ = 1/ R2e2jϴ = 0.e-j2ϴ = 0 |
|
|
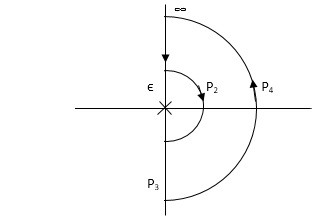
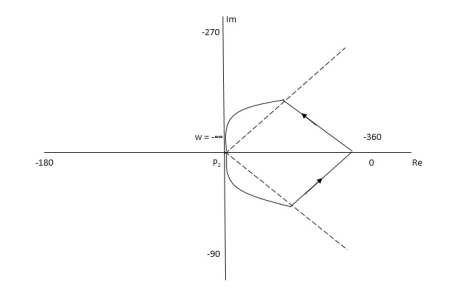
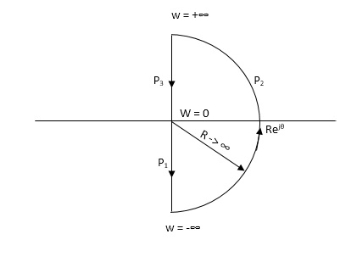
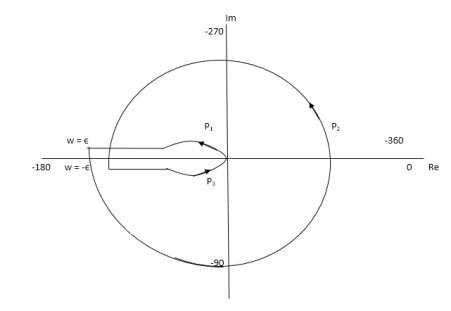
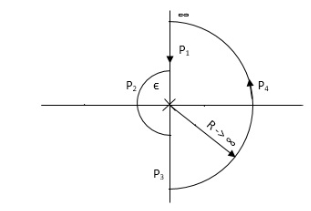
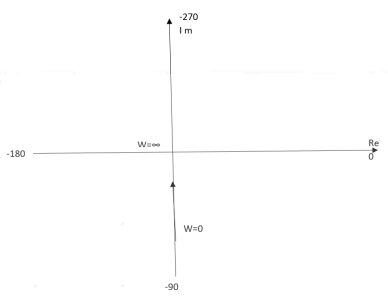
P1 W(∞ Ɛ) where Ɛ 0 P2 S = Ɛejϴ ϴ(+π/2 to 0 to -π/2) P3 W = -Ɛ to -∞ P4 S = Rejϴ, R ∞, ϴ = -π/2 to 0 to +π/2 For P1 M = 1/w.w√102 + w2 = 1/w2√102 + w2 Φ = -1800 – tan-1(w/10) W M Φ ∞ 0 -3 π/2 Ɛ ∞ -1800 Path P3 will be mirror image of P1 about Real axis. G(Ɛ ejϴ) = 1/( Ɛ ejϴ)2(Ɛ ejϴ + 10) Ɛ 0, ϴ = π/2 to 0 to -π/2 = 1/ Ɛ2 e2jϴ(Ɛ ejϴ + 10) = ∞. e-j2ϴ [ -2ϴ = -π to 0 to +π ] Path P2 will be formed by rotating through -π to 0 to +π Path P4 S = Rejϴ R ∞ ϴ = -π/2 to 0 to +π/2 G(Rejϴ) = 1/ (Rejϴ)2(10 + Rejϴ) = 0 N = Z – P No poles on right half of S plane so, P = 0 N = Z – 0 |
|
|
|
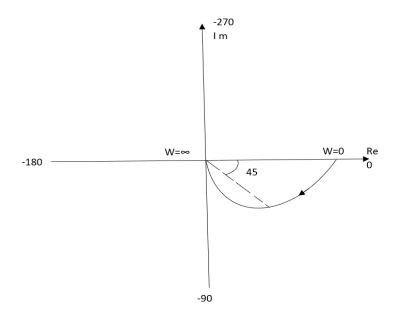
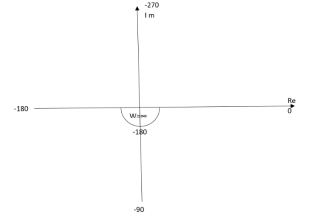
TF = 1/1 + jw (2). Magnitude M = 1 + 0j / 1 + jw = 1/√1 + w2 (3). Phase φ = tan-1(0)/ tan-1w = - tan-1w W M φ 0 1 00 1 0.707 -450 ∞ 0 -900 |
|
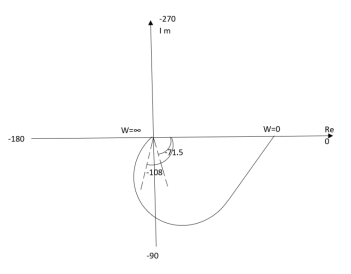
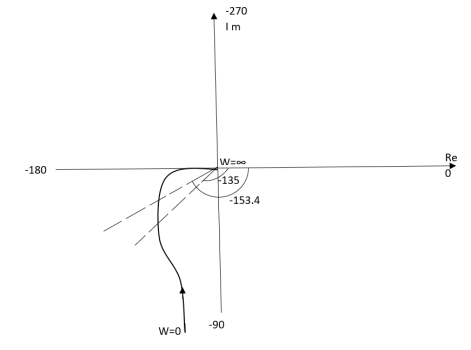
(1). S = jw TF = 1/(1+jw)(2+jw) (2). M = 1/(1+jw)(2+jw) = 1/-w2 + 3jw + 2 M = 1/√1 + w2√4 + w2 (3). Φ = - tan-1 w - tan-1(w/2) W M Φ 0 0.5 00 1 0.316 -71.560 2 0.158 -108.430 ∞ 0 -1800
|
|
|
|
|
|
|