A3) If the input to the system is unit impulse response, then the output of the system is known as impulse response of the system denoted by h(n). That is h(n) = T [ δ(n)]…………………………………………………………..(1) The arbitrary sequence x(n) can be represented as weighted sum of discrete impulses given by x(n) = Then the output y(n) = T [
|


A4)
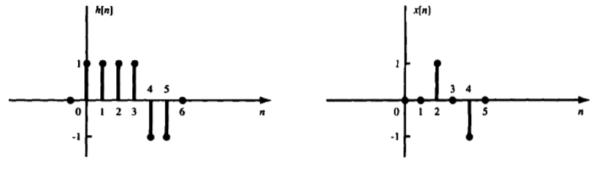
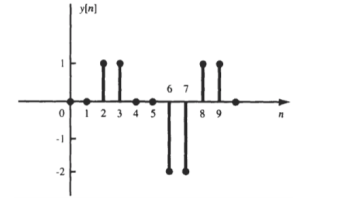
h[n] = δ[n] + δ[n-1] + δ[n-2]+ δ[n-3]+ δ[n-4]+ δ[n-5] x[n] = δ[n-2] - δ[n-4] x[n] * h[n] = x[n] * { δ[n] + δ[n-1] + δ[n-2]+ δ[n-3]+ δ[n-4]+ δ[n-5]} = x[n] + x[n-1] + x[n-2]+ x[n-3]+ x[n-4]+ x[n-5] y[n] = δ[n-2]- δ[n-4]+ δ[n-3]- δ[n-5] + δ[n-4]- δ[n-6]+ δ[n-5]- δ[n-7] - δ[n-6]+ δ[n-8]- δ[n-7]+ δ[n-9]} = δ[n-2]+ δ[n-3]-2 δ[n-6]-2 δ[n-7] + δ[n-8]+ δ[n-9] y[n] = {0,0,1,1,0,0,-2,-2,1,1}
|
A5) Using linear property of the system the interchange operator T with the summation k to obtain y(n) = [ The response to the shifted impulses is represented as h(n,k) h(n,k) = T[ δ(n-k)] Now y(n) = For time-invariant system h(n,k) =h(n-k) ----------------------------------------------------------------------(6) Substituting (6) in (5) we get y(n) = Thus, the output of the LTI system is given by the weighted sum of time-shifted responses. The sum in eq(7) is termed as convolution sum which is given by y(n) = x(n) * h(n) -----------------------------------------------------------------------------(8) * denotes convolution operation.
|



A6) We know that for discrete time system, convolution of two sequence can be given by: y(n) = x(n) * h(n) = ∑ x[i]h[n-i] Where * denotes the convolution operator, and where i ranges from -∞ to +∞ Hence y(n) = [3, 6+2,3+4+1,6+2+2+2,4+1+4,2+2,4] =>y(n) = [3,8,8,12,9,4,4] |
A7) Consider an LTI system which is initially related at t=0. If the input of the system is an impulse, then the output of the system is denoted by h(t) is called the impulse response of the system. We can denote h(t) = T [ δ(t)] We know that any arbitrary signal x(t) can be represented as x(t) = The system output is given by y(t) = T[x(t)] --------------------------------------------------------------------------------(2) Substituting (1) in (2) y(t) = T [ For linear system y(t) = [ If the response of the system due to impulse δ(t) is h(t) then the response of the system due to delayed impulse is h(t, Substituting (5) in (4) we get y(t) = [ For a time invariant system the output due to the delayed input by T is equal to delayed output by T, That is h(t,τ) = h(t-τ) ---------------------------------------------------------------(7) Substituting (7) in (6) we get y(t) = This is called convolution Integral. The convolution of two signal x(t) and h(t) can be represented as y(t) = x(t) * h(t) |















A8) The procedure is as follows:
|
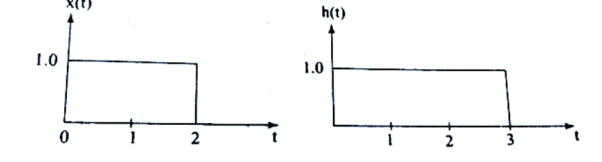
A9) x(t) =1 0 = 0 otherwise
Fig . x(t) and h(t)
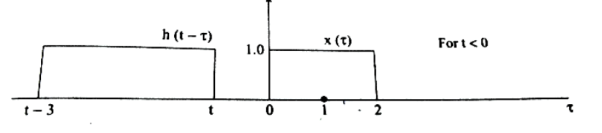
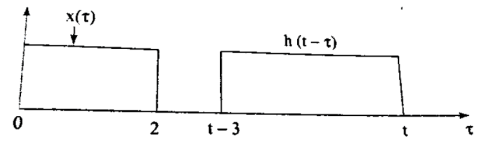
Figure : x(τ) and h(t-τ) As shown in Figure the signals x(τ) and h(t-τ) does not overlap for t<0. Therefore the product x(τ) h(t-τ) is zero. That is, y(t) =
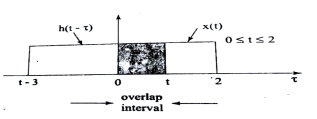
Now the shift the signal h(t-τ) right until the right edge of the signal h(t-τ) intersects left edge of x(τ). In the interval 0 y(t) =
Figure . Product of x(t) and h(t-τ)
In the interval 2
y(t) =
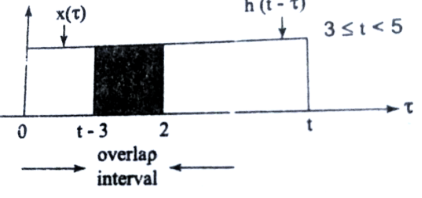
In the interval 3
Figure . Product of h(t-τ) x(τ)
y(t) = = 5-t.
For t
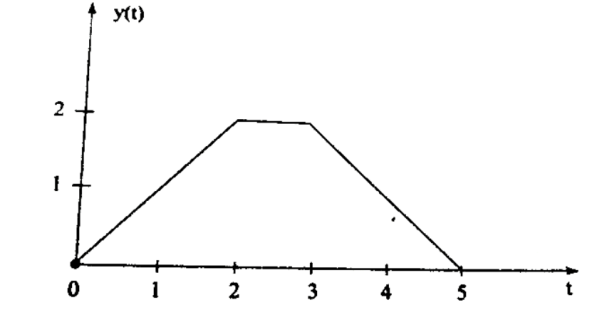
Figure. Product of x(τ) h(t-τ) for t The signals x(τ) and h(t-τ) do not overlap. Therefore y(t)=0. y(t) = 0 for t<0 = t for 1 = 2 for 2 = 5-t for 3 =0 for t
The sketch y(t) is as shown in figure
Figure . The output waveform
|














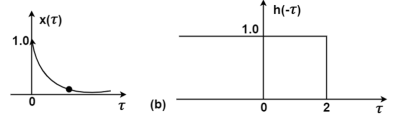
A10) Given: x(t) = e -2 u(t) h(t) = u(t+2)
Figure . x(t) and h(t)
Figure . Product exponential signal and unit step signal
Figure10. Product of exponential signal and delayed unit step signal
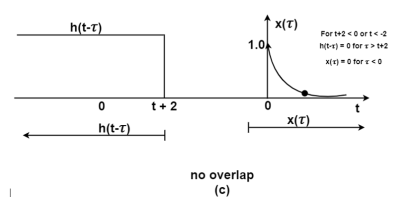
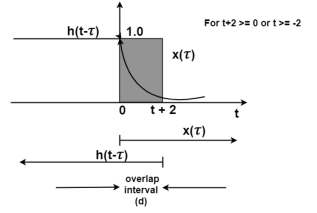
Figure . The output waveform Figure (a) shows x(t) and h(t) . Fig (b) shows x(τ) and h(-τ) as functions of τ. The function h(-τ) can be obtained by folding the signal h(τ) about τ=0. Figure (c ) shows that signal h(t-τ) is sketched for t<-2 by shifting h(τ) to left. For t<-2 x(τ) and h(t-τ) does not overlap and the product x(τ) h(t-τ) =0 that is y(t) =0 for t<-2 Now increase the time shift until the signal h(t-τ) intersects x(τ). Figure (d) shows the situation for t>-2. Here x(τ) =0 for τ <0 and h(t-τ) does not overlap and the product x(τ) h(t-τ) =0 that is y(t)=0 for t<-2 Now increase the time shift t until the signal h(t-τ) intersects x(τ). Figure (d) shows the situation for t>-2. Here x(τ) and h(t-τ) overlapped. But x(τ) =0 for τ<0 and h(t-τ) = 0 for τ > t+2. Therefore, the integration interval is from τ=0 to τ=t+2 y(t) =
= = = -1/2 e -2 τ | 0 t+2 = -1/2 [ e -2 (t+2) -1] = 1 – e -2(t+2) /2
y(t) = 0 for t<-2 = 1 – e-2(t+2)/2 for t
|