A1) A system is memoryless if its output depends on the current input only. From the expression y[n] = x[n] *h[n]
=
It is easily seen that y[n] depends only on x[n] only if h[n] =0 for n h[n] = k δ[n] Hence y[n] = x[n] *h[n] = x[n] * k δ[n] = (k* δ) [n] = k x[n]
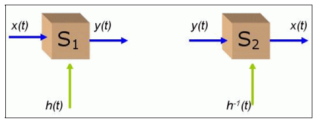
Invertibility : A system is said to be invertible if there exists an inverse system which when connected in series with the original system produces an output identical to input. (x *δ) [n] = x[n] (x*h*h-1 ) [n] = x[n] (h*h-1) [n] = δ[n]
Figure 1. Invertibilty
Casuality :
y[n] = In order for discrete LTI system be casual y[n] must not depend on x[k] for k>n. For this to be true h[n-k] corresponding to the x[k]’s for k>n must be zero. This then requires the impulse response of casual discrete time LTI system satisfy the following conditions h[n] =0 . Essentially the system output depends on the past and present values of the input
|




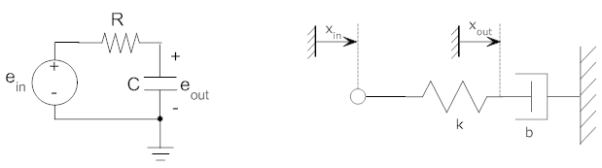
yγ(t) = 0 for t<0 1-e -t/τ t
Where τ=RC
For the electrical system τ=RC
For the mechanical system τ=b/k
|

Q3) Explain differential equation representation?
A3) The general form of differential equation is
Where ak and bk are coeffecients
|


A4) Given d 2 y(t) / dt 2 + 5 d y(t)/dt + 6 y(t) = d x(t)/dt + 4 x(t) The natural response can be obtained by equating input terms in differential equation to zero. d 2 y(t) / dt 2 + 5 d y(t)/dt + 6 y(t)=0 The characteristic equation is
The homogenous solution is yh(t) = c1 e -2t + c2 e -3t y (0+) = c1 + c2 d y (0+)/dt = 2 c1 e -2t + (-3) c2 e -3t |t=0 = 2c1 – 3c2 From initial conditions y (0+) = 3 dy (0+)/dt =0 Comparing we get c1 + c2 =3 2c1 + 3c2 =0. c2 =-6 and c1=9 yn(t) = 9 e -2t – 6 e -3t
Forced response: The homogeneous solution is given by yn(t) = c1 e -2t + c2 e -3t for input x(t) = e -t The particular solution is of the form yp(t) = k e -t from which dyp(t)/dt = -k e-t d2 yp(t)/dt2 = k e-t Therefore, d 2 yp(t)/dt2 + 5 d yp(t)/dt + 6 yp(t) = dx(t)/dt + 4 x(t) k e -t – 5 k e-t + 6 k e-t = - e-t + 4 e-t 2k = 3 K=1.5 yp(t) = 1.5 e -t. The forced response is the sum of homogeneous solution for particular solution. yf(t) = c1 e -2t + c2 e -3t + 1.5 e -t y(0+) = c1 + c2 +1.5 dy(0+)/dt = -2c1 e -2t -3 c2 e -3t – 1.5 e -t |t=0 To obtain forced response equate initial conditions to zero C1 + C2 = -1.5 2C1 + 3C2 = -1.5 Solving for c1 and c2 we get C2 = 1.5 C1 =-3 y(t) = yn(t) + yf(t) Substituting yn(t) and yf(t) we get y(t) = 6 e -2t – 4.5 e -3t + 1.5 e -t y(0) = c1 + c2 + 1.5 =3 dy(0+)/dt = -2c1 -3c2 -1.5 =0 c1 =6 and c2 =-4.5 y(t) = 6 e -2t -4.5 e -3t + 1.5 e -t
|


A5) Where the particular solution satisfies for n≥0 and the homogeneous solution satisfies yh[n] + 0.5 yh[n-1] = 0 for n ≥0 yp(n) = y (-0.8) n Then we get Y (-0.8) n + 0.5Y(-0.8) n-1 = (-0.8) n Y [ 1+0.5(-0.8) -1] = 1 Y=8/3 which yields yp(n) = 8/3 (-0.8) n To determine yh(n) Yh[n] = A z n 1+ 0.5 z -1 =0 z=-0.5 y[n] = yh[n]+yp[n] = A(-0.5) n + 8/3 (-0.8) n y[n] = -0.5 y[n-1] + (-0.8) n u[n] -- n=0 y[0] = -0.5y[-1] + (-0.8) n =0+1=1 y[0] = 1=A(-0.5) 0 + 8/3 (-0.8) 0 = A+8/3 = 1 A=-5/3 y[n] = 5/3 (-0.5) n + 8/3 (-0.8) n
|
A block diagram is an interconnection of elementary operations that act on the input signal. The impulse response and differential /difference equation descriptions represent only the input -output behaviour of the system, block diagram representation describes how the operations are ordered. Each block diagram representation describes a different set of internal computations used to determine the system output.
|
Scalar Multiplication: y(t) = cx(t) or y[n] = x[n] where c is scalar
Figure . Parameters for block diagram
|
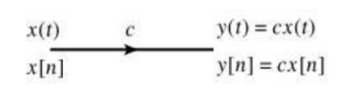
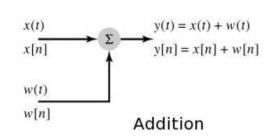
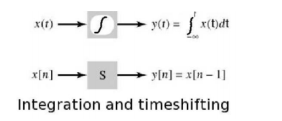
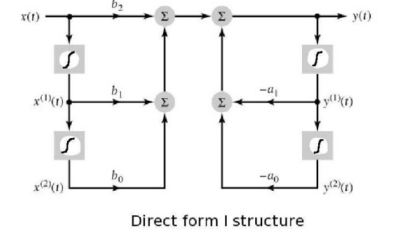
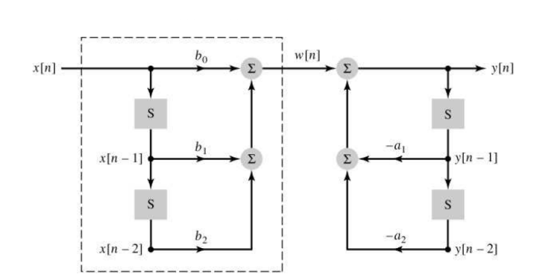
Figure . Direct Form -I Consider the system described by the block diagram as shown in figure. The part within the dashed box is the input x[n] which is time shifted by 1 to get x[n-1] and again time shifted by 1 to get x[n-1] and again time shifted to get x[n-2]. These scalar multiplications are carried out and added to get w[n] = bo x[n] + b1 x[n-1] + b2 x[n-2] Put the value of w[n] and we get y[n] = -a1y[n-1] – a2y[n-2] + bo x[n] + b1 x[n-1] + b2 x[n-2]
|
|

A10) Rewrite the differential equation we get
As an integral equation . Let v(o) (t) = v(t) be an arbitrary signal and set
v (n) (t) = where v (n) (t) is the n-fold integral of v(t) with respect to time Rewrite in terms of initial condition on the integrator as v (n) (t) = If we assume zero ICs then differentiation and integration are inverse operations d/dt v(n) (t) = v (n-1) (t) t> 0 and n=1,2,3………………….. Thus, if N
For the second order system with ao=1 the differential equation can be Written as y (t) = -a1 y(1) (t) – ao y(2) (t) + b2 x(t) + a1 x(1) (t) + bo x(2) (t)
Figure . Direct form
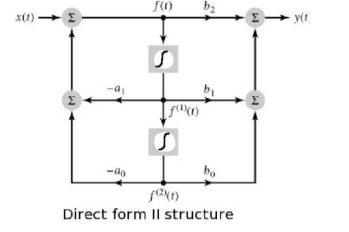
Figure . Direct form-II
|