A2) Suppose our input signal is x(t) X(t) = A ei2πfot + iɸ--------------------------------------(1)
Where A is the real valued amplitude, fo is the frequency and ɸ is the phase parameter.
The output y(t) =
=
Suppose x(t) is sine wave then y(t) =
The Fourier transform of h(t) to obtain the input output relationship y(t) = H(fo) [ A ei2πfot+iɸ] or y(t) = H(fo) x(t) The LTI system passes sine wave input to the output after scaling it by complex number H(fo) where fo is the frequnecy of the sine wave and H(f) is the Fourier transform of the impulse response . Linear systems do not create new frequnecy components they can only scale each frequency component at the input to produce the output. |



Q3) Explain the Fourier transform of periodic signals?
A3) We know that the Fourier transform of the signal assumes the value 1 identically is the dirac-delta function.
By property of translation in the frequency domain we get
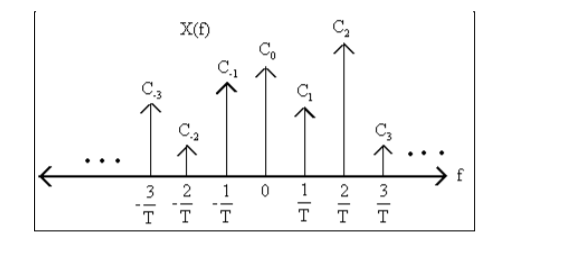
Suppose x(t) is a periodic signal with period T which admits Fourier series representation Then x(t) = where ck = 1/T since the Fourier transformation is linear the above result can be used to obtain Fourier transform of the periodic signal X(f) = Therefore X(f) = By putting the inverse Fourier transform equation one can indeed confirm that one obtains the Fourier series representation of x(t)
=
=
Thus, the Fourier transform of a periodic signal having the Fourier series coefficients is a train of impulses, occurring at multiples of the fundamental frequency, the strength of the impulse at k/T being ck which looks like
Figure . Fourier representation of periodic signals
Q4) Explain the magnitude and phase response of FT?
A4) H(e jw) = H R ( e jw) + j H I ( e jw) = | H ( e jw) | e j
Example: h[n] = - δ[n] | H (ejw)| = 1 angle H(e jw) = π
In the magnitude or phase representation a real valued frequency response does not mean that the system is zero-phase. Using this representation, |Y (e jw) | = | H ( ejw)| | X (ejw)|
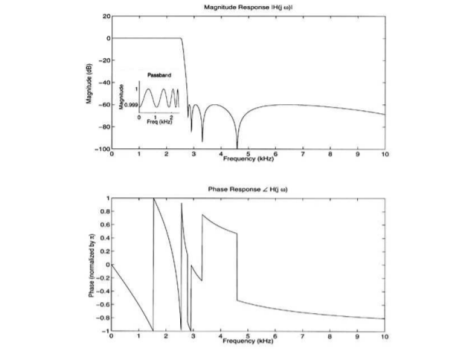
Thus, |H(ejω)| and angle H(ejω) are commonly referred to as the gain and the phase shift of the system, respectively. In magnitude and phase plots, as ω goes through a zero on the unit circle, the magnitude will go to zero and the phase will flip by π, as shown in the figure below.
Figure. Magnitude and Phase response
Q5) Explain DTFT?
A5) The discrete-time Fourier transform (DTFT) or the Fourier transform of a discrete–time sequence x[n] is a representation of the sequence in terms of the complex exponential sequence ejωn. The DTFT sequence x[n] is given by
X(w) =
Here X(w) is a complex function of real frequency variable w and can be written as X(w) = Xre (w) + j X img(w) where Xre (w) , j X img(w) are real and Imaginary parts of X(w) Xre(w) = |X(w) |cos Ximg(w) = |X(w)| sin |X(w)| 2 = |Xre(w)| 2 + |Xim(w)| 2
And | X(w)| can be represented as
Inverse Discrete Fourier Transform is given by
Q6) State sampling theorem?
A6) Sampling theorem states that “The continues form of a time-variant signal can be represented in the discrete form of a signal with help of samples and the sampled can be recovered to original form when the sampling signal frequency Fs having the greater frequency value than or equal to twice the input signal frequency Fm. Fs ≥ 2Fm
Q7) Explain sampling theorem?
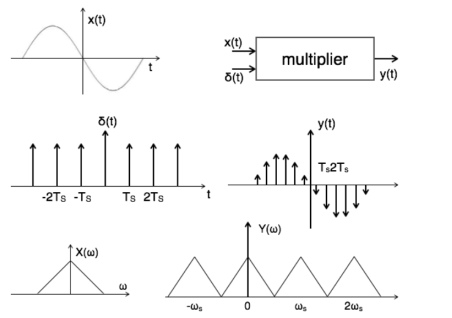
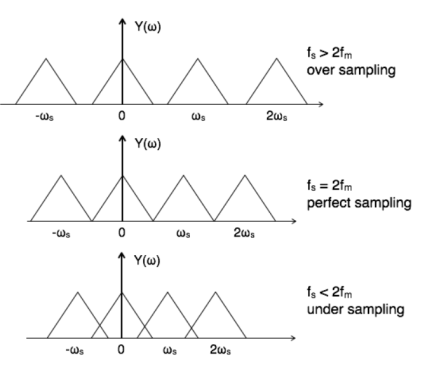
A7) Spectra of sampled signals Consider a continuous time signal x(t). The spectrum of x(t) is a band limited to fm Hz that is the spectrum of x(t) is zero for |ω|>ωm. Sampling of input signal x(t) can be obtained by multiplying x(t) with an impulse train δ(t) of period Ts. The output of multiplier is a discrete signal called sampled signal which is represented with y(t) in the following diagrams:
Figure1. Spectrum of the sampled signal The sampled signal y(t) = x(t) . δ(t) ---------------------------------(1) The Fourier series representation of δ(t) is given by δ (t) = ao + where ao = 1/Ts an = 2/Ts bn= 2/Ts Therefore δ (t) = 1/Ts + The sampled signal y(t) = x(t). δ(t) = x(t) [1/Ts + = 1/Ts [ x(t) + 2 y(t) = 1/Ts [ x(t) + 2 cos wst . x(t) + 2 cos 2wst. x(t) + 2 cos 3ws(t) . x(t) +………..] Taking Fourier transform on both the sides we get Y(w) = 1/Ts [ X(w) + X(w-ws) + X(w+ws) + X(w-2ws) + X(w+2ws) +…..] Y(w) = 1/Ts
Figure . Sampled spectrum with different conditions
Q8) What is Nyquist criteria?
A8) If the sampling frequency (Fs) equals twice the input signal frequency (Fm), then such a condition is called the Nyquist Criteria. When sampling frequency equals twice the input signal frequency is known as “Nyquist rate”. Fs=2Fm Q9) What is aliasing effect? A9) If the sampling frequency (Fs) is less than twice the input signal frequency, such criteria called an Aliasing effect. Fs<2Fm
Q10) What are the applications of Sampling theorem?
A10) The applications include the use of robotics, just-in-time inventory management, computer aided design, and computer aided manufacturing. Management controls, including financial analysis used for factory operations, are now undergoing similar innovation.
|