X(z) = |

 ------- (1) where z is a complex variable.
------- (1) where z is a complex variable.In polar form z can be expressed as z = r e jw ---------------(2) where r is the radius of a circle For n≥ 0 X(z ) = By substituting z = r e jw X(r e jw) = Equation(5) represents the Fourier transform of the signal x(n) r-n Hence the inverse DTFT X(r ejw) must be x(n) r-n. x(n) r-n = 1/2π On multiplying both sides by rn we get x(n) = 1/ 2 π Let z= r e jw and dw= dz/jz dz = r ejw dw dw = dz/jre jw x[n] = 1/ 2πj |





x[n] = 4 |




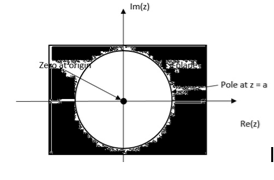
X(z) = = 1 for n≥0 = = This is a geometric series of infinite length that is a + ar + ar2 + ………….. ∞ = a /1-r if |r| <1 Then from equation (3) it converges when |az-1| < 1 or |z| >|a| Therefore X(z) = 1/ 1-az-1: ROC |z| > |a|
|



X(z) = X(z) = = 1 for n ≤ -1 = = b-1z/1- b-1z = z/ z-b = 1/ 1-bz-1 |z| < |b|
|



 u(n)
u(n) X(z) = = = = ½ [ Both the series converges if [ e j Now X(z) = ½ [ 1/1 – e j = ½ [ 1 – e -j e j = ½ [ 2 – 2 z -1 cos = 1-z-1 cos |
























X(z)= log(1-az-1) Differentiating both sides we get d/dz X(z) = 1/1-az-1 (a z-2) = az-2/1- az-1 -z d/dz { X(z)} =-az-1/1-az-1 = -az-1[ 1/1-az-1] = -a Z[ a n-1 u(n-1)] -------- (1) From differentiation property Z{ n x(n)} = -z d/dz [ X(z)] ------- (2) Comparing (1) and (2) we get n x(n) = -a [ a n-1 u(n-1)] or x(n) = -a [a n-1 u(n-1)]/n |
X(z) = z+0.2 / z2 -0.5z -0.5 Divide the numerator by denominator z-1 + 0.7 z-2 + 0.85 z-3 + 0.775 z-4
z+0.2
0.7 + 0.5 z-1
0.85 z -1 + 0.35 z-2 0.85 z-1 -0.42 z-2 -0.425 z-3
0.775 z -2 + 0.425 z-3 0.775 z-2 -0.387 z-3 – 0.3875 z-4
X(z) = z-1 + 0.7 z-2 + 0.85 z-3 + 0.775 z -4 + ……………………………. |





X(z) = ¼ z-1 (1 – ½ z-1)(1-1/4 z-1)
X(z) = A + B Z (1-1/2z-1) (1 – ¼ z-1)
By solving A= 1 and B=-1 Therefore, X(z) = z - z z-1/2 z-1/4 x(n) = (1/2) n u(n) – (1/4) n u(n) |




